 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimising Dynamic Traffic Distribution for Urban Networks with Answer Set Programming
Aug 14, 2024



Answer Set Programming (ASP) has demonstrated its potential as an effective tool for concisely representing and reasoning about real-world problems. In this paper, we present an application in which ASP has been successfully used in the context of dynamic traffic distribution for urban networks, within a more general framework devised for solving such a real-world problem. In particular, ASP has been employed for the computation of the "optimal" routes for all the vehicles in the network. We also provide an empirical analysis of the performance of the whole framework, and of its part in which ASP is employed, on two European urban areas, which shows the viability of the framework and the contribution ASP can give.
Competitions in AI -- Robustly Ranking Solvers Using Statistical Resampling
Aug 09, 2023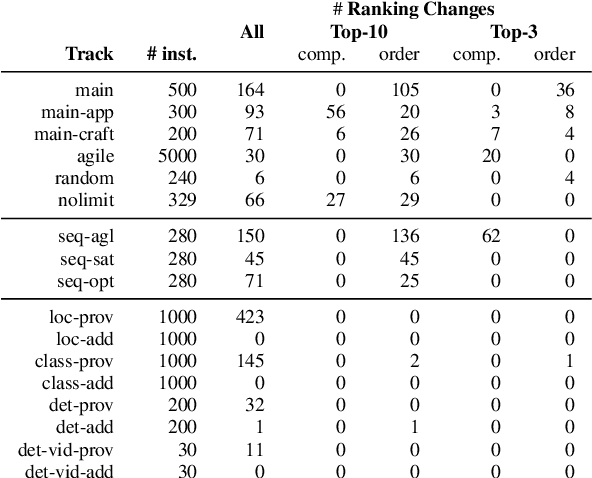
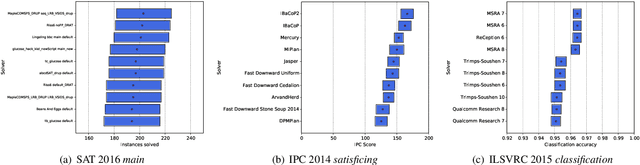
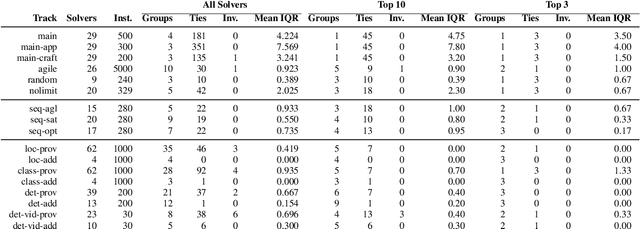
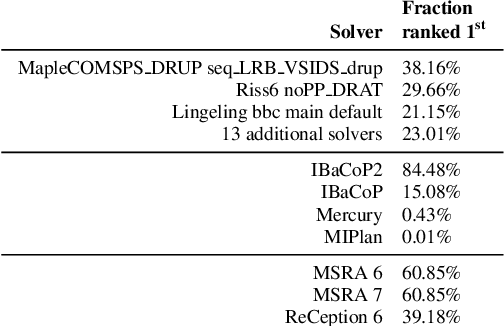
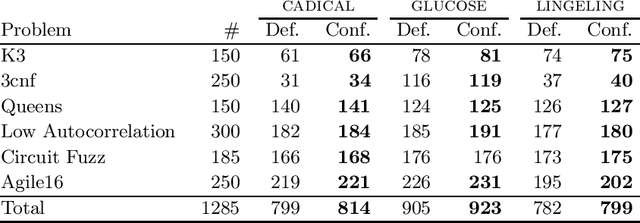
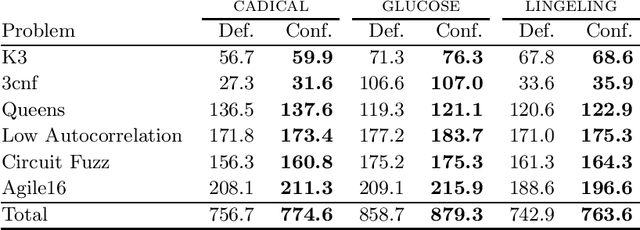
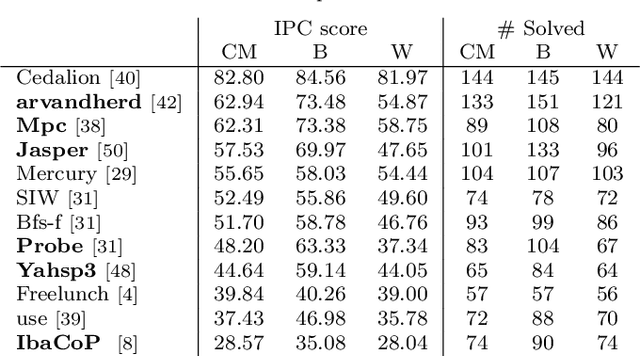
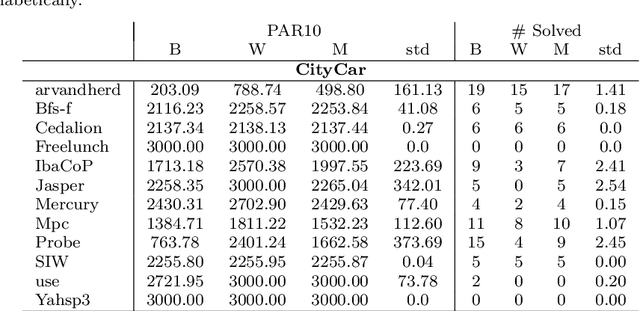
Solver competitions play a prominent role in assessing and advancing the state of the art for solving many problems in AI and beyond. Notably, in many areas of AI, competitions have had substantial impact in guiding research and applications for many years, and for a solver to be ranked highly in a competition carries considerable weight. But to which extent can we expect competition results to generalise to sets of problem instances different from those used in a particular competition? This is the question we investigate here, using statistical resampling techniques. We show that the rankings resulting from the standard interpretation of competition results can be very sensitive to even minor changes in the benchmark instance set used as the basis for assessment and can therefore not be expected to carry over to other samples from the same underlying instance distribution. To address this problem, we introduce a novel approach to statistically meaningful analysis of competition results based on resampling performance data. Our approach produces confidence intervals of competition scores as well as statistically robust solver rankings with bounded error. Applied to recent SAT, AI planning and computer vision competitions, our analysis reveals frequent statistical ties in solver performance as well as some inversions of ranks compared to the official results based on simple scoring.
Reformulation Techniques for Automated Planning: A Systematic Review
Jan 30, 2023Automated planning is a prominent area of Artificial Intelligence, and an important component for intelligent autonomous agents. A cornerstone of domain-independent planning is the separation between planning logic, i.e. the automated reasoning side, and the knowledge model, that encodes a formal representation of domain knowledge needed to reason upon a given problem to synthesise a solution plan. Such a separation enables the use of reformulation techniques, which transform how a model is represented in order to improve the efficiency of plan generation. Over the past decades, significant research effort has been devoted to the design of reformulation techniques. In this paper, we present a systematic review of the large body of work on reformulation techniques for classical planning, aiming to provide a holistic view of the field and to foster future research in the area. As a tangible outcome, we provide a qualitative comparison of the existing classes of techniques, that can help researchers gain an overview of their strengths and weaknesses.
On the Configuration of More and Less Expressive Logic Programs
Mar 02, 2022
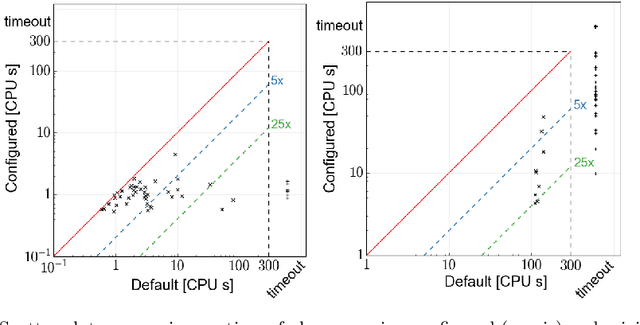
The decoupling between the representation of a certain problem, i.e., its knowledge model, and the reasoning side is one of main strong points of model-based Artificial Intelligence (AI). This allows, e.g. to focus on improving the reasoning side by having advantages on the whole solving process. Further, it is also well-known that many solvers are very sensitive to even syntactic changes in the input. In this paper, we focus on improving the reasoning side by taking advantages of such sensitivity. We consider two well-known model-based AI methodologies, SAT and ASP, define a number of syntactic features that may characterise their inputs, and use automated configuration tools to reformulate the input formula or program. Results of a wide experimental analysis involving SAT and ASP domains, taken from respective competitions, show the different advantages that can be obtained by using input reformulation and configuration. Under consideration in Theory and Practice of Logic Programming (TPLP).
Fudge: A light-weight solver for abstract argumentation based on SAT reductions
Sep 07, 2021We present Fudge, an abstract argumentation solver that tightly integrates satisfiability solving technology to solve a series of abstract argumentation problems. While most of the encodings used by Fudge derive from standard translation approaches, Fudge makes use of completely novel encodings to solve the skeptical reasoning problem wrt. preferred semantics and problems wrt. ideal semantics.
Collaborative Robotic Manipulation: A Use Case of Articulated Objects in Three-dimensions with Gravity
Nov 13, 2020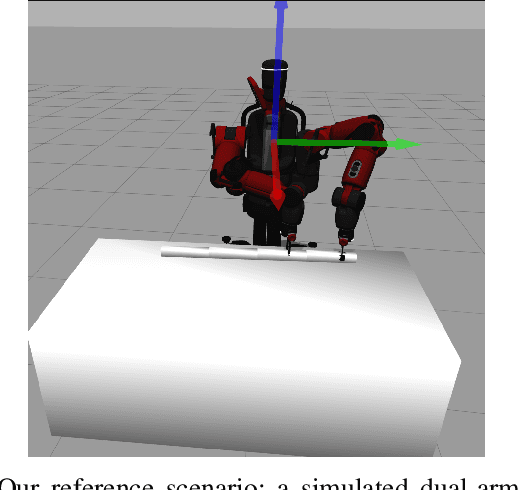
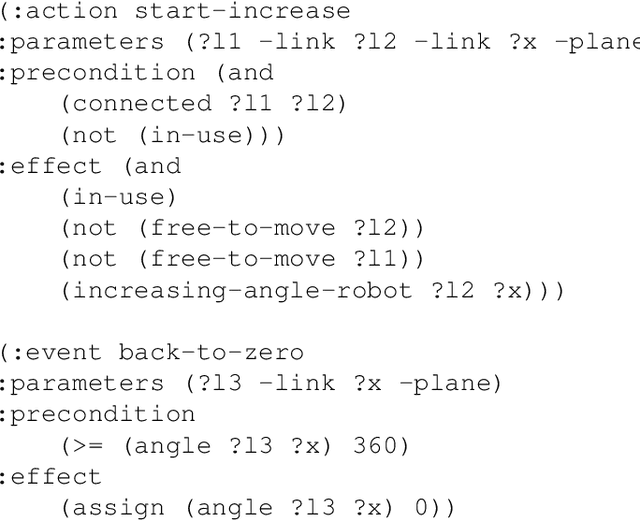
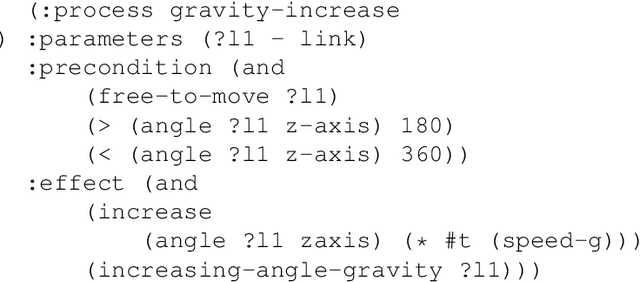
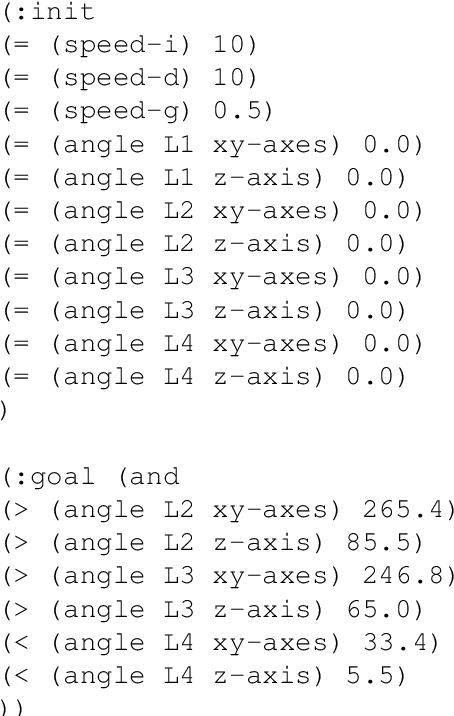
This paper addresses two intertwined needs for collaborative robots operating in shop-floor environments. The first is the ability to perform complex manipulation operations, such as those on articulated or even flexible objects, in a way robust to a high degree of variability in the actions possibly carried out by human operators during collaborative tasks. The second is encoding in such operations a basic knowledge about physical laws (e.g., gravity), and their effects on the models used by the robot to plan its actions, to generate more robust plans. We adopt the manipulation in three-dimensional space of articulated objects as an effective use case to ground both needs, and we use a variant of the Planning Domain Definition Language to integrate the planning process with a notion of gravity. Different complexity levels in modelling gravity are evaluated, which trade-off model faithfulness and performance. A thorough validation of the framework is done in simulation using a dual-arm Baxter manipulator.
On the Importance of Domain Model Configuration for Automated Planning Engines
Oct 15, 2020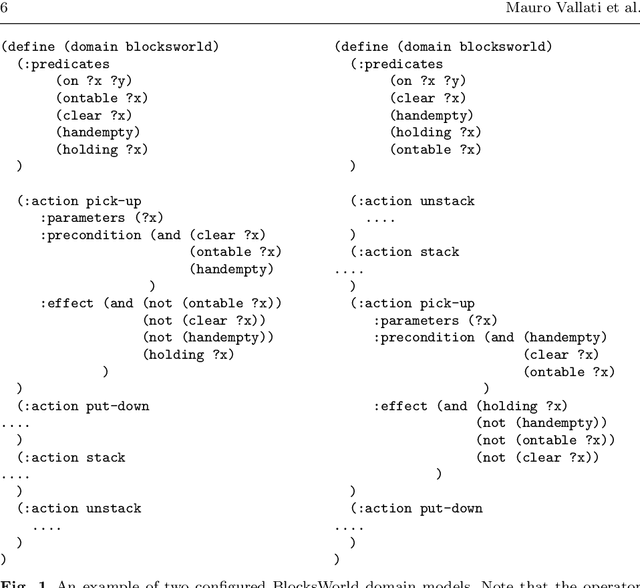
The development of domain-independent planners within the AI Planning community is leading to "off-the-shelf" technology that can be used in a wide range of applications. Moreover, it allows a modular approach --in which planners and domain knowledge are modules of larger software applications-- that facilitates substitutions or improvements of individual modules without changing the rest of the system. This approach also supports the use of reformulation and configuration techniques, which transform how a model is represented in order to improve the efficiency of plan generation. In this article, we investigate how the performance of domain-independent planners is affected by domain model configuration, i.e., the order in which elements are ordered in the model, particularly in the light of planner comparisons. We then introduce techniques for the online and offline configuration of domain models, and we analyse the impact of domain model configuration on other reformulation approaches, such as macros.
Manipulation of Articulated Objects using Dual-arm Robots via Answer Set Programming
Oct 02, 2020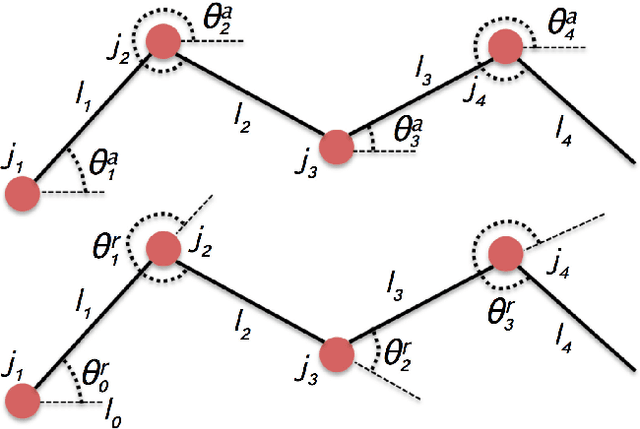
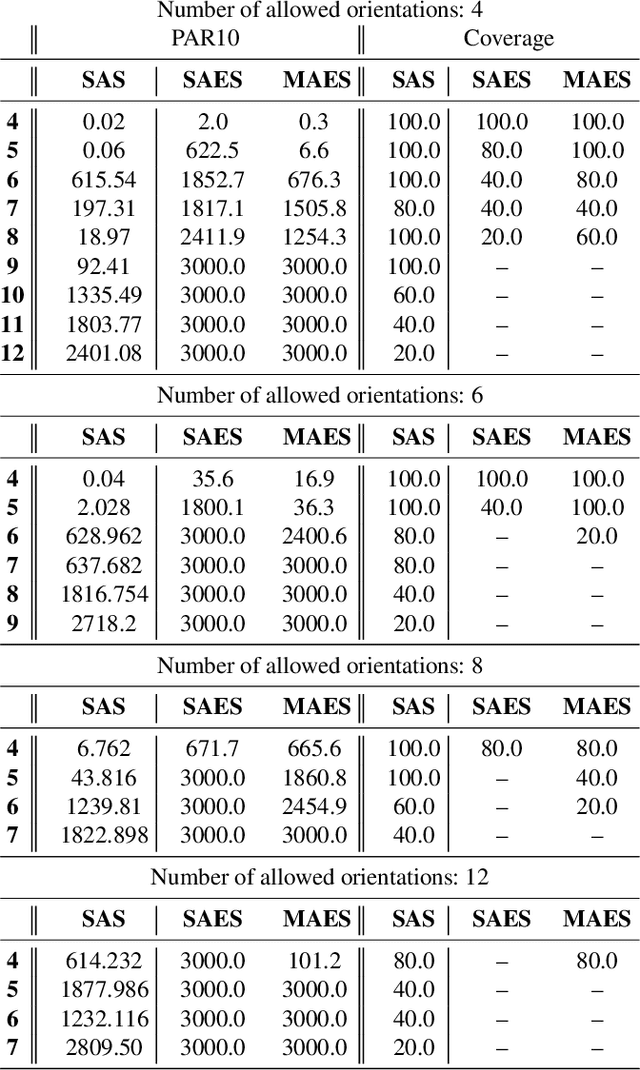
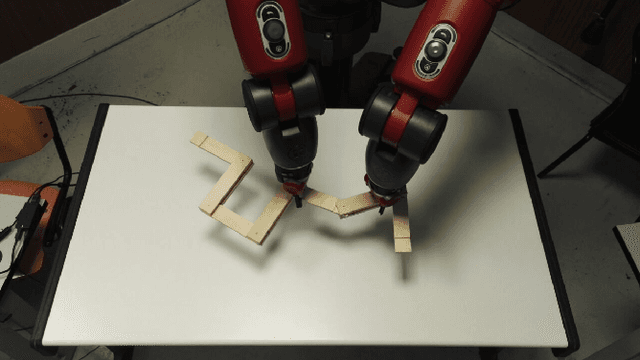
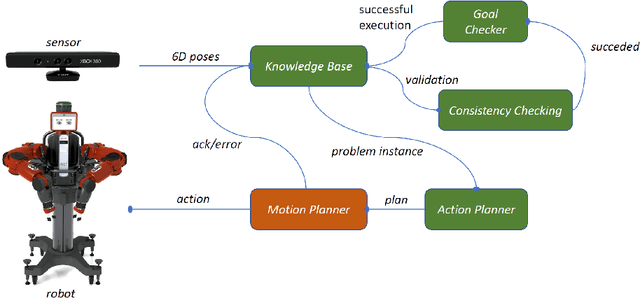
The manipulation of articulated objects is of primary importance in Robotics, and can be considered as one of the most complex manipulation tasks. Traditionally, this problem has been tackled by developing ad-hoc approaches, which lack flexibility and portability. In this paper we present a framework based on Answer Set Programming (ASP) for the automated manipulation of articulated objects in a robot control architecture. In particular, ASP is employed for representing the configuration of the articulated object, for checking the consistency of such representation in the knowledge base, and for generating the sequence of manipulation actions. The framework is exemplified and validated on the Baxter dual-arm manipulator in a first, simple scenario. Then, we extend such scenario to improve the overall setup accuracy, and to introduce a few constraints in robot actions execution to enforce their feasibility. The extended scenario entails a high number of possible actions that can be fruitfully combined together. Therefore, we exploit macro actions from automated planning in order to provide more effective plans. We validate the overall framework in the extended scenario, thereby confirming the applicability of ASP also in more realistic Robotics settings, and showing the usefulness of macro actions for the robot-based manipulation of articulated objects. Under consideration in Theory and Practice of Logic Programming (TPLP).
Organising a Successful AI Online Conference: Lessons from SoCS 2020
Jun 22, 2020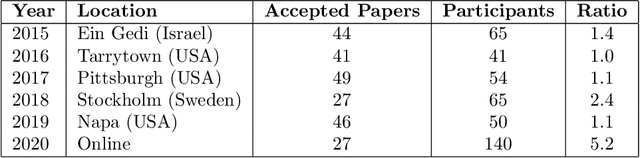
The 13th Symposium on Combinatorial Search (SoCS) was held May 26-28, 2020. Originally scheduled to take place in Vienna, Austria, the symposium pivoted toward a fully online technical program in early March. As an in-person event SoCS offers participants a diverse array of scholarly activities including technical talks (long and short), poster sessions, plenary sessions, a community meeting and, new for 2020, a Master Class tutorial program. This paper describes challenges, approaches and opportunities associated with adapting these many different activities to the online setting. We consider issues such as scheduling, dissemination, attendee interaction and community engagement before, during and after the event. We report on the approaches taken by SoCS in each case, we give a post-hoc analysis of their their effectiveness and we discuss how these decisions continue to impact the SoCS community in the days after SoCS 2020.
On the manipulation of articulated objects in human-robot cooperation scenarios
Jan 13, 2018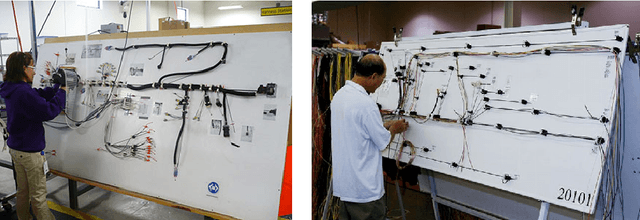
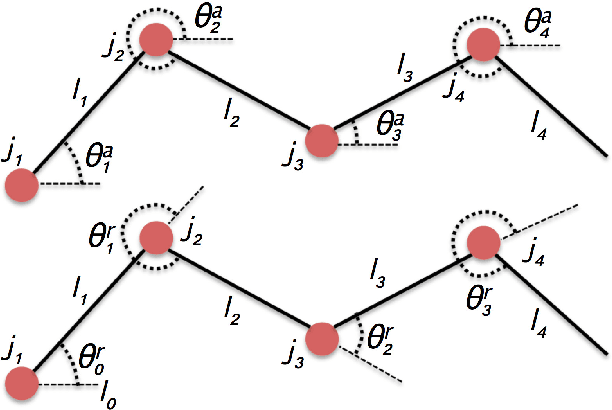
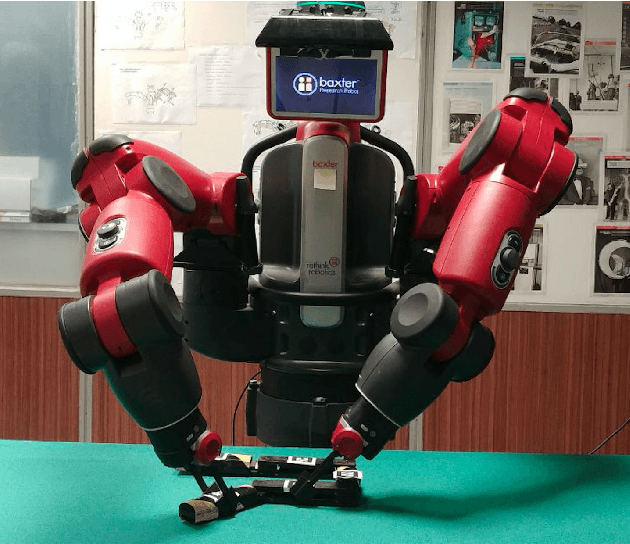
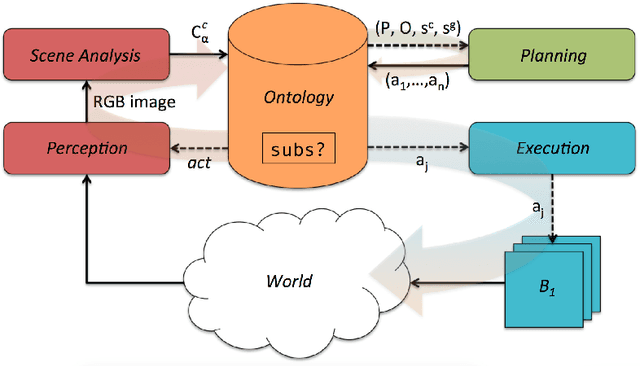
Articulated and flexible objects constitute a challenge for robot manipulation tasks but are present in different real-world settings, including home and industrial environments. Current approaches to the manipulation of articulated and flexible objects employ ad hoc strategies to sequence and perform actions on them depending on a number of physical or geometrical characteristics related to those objects, as well as on an a priori classification of target object configurations. In this paper, we propose an action planning and execution framework, which (i) considers abstract representations of articulated or flexible objects, (ii) integrates action planning to reason upon such configurations and to sequence an appropriate set of actions with the aim of obtaining a target configuration provided as a goal, and (iii) is able to cooperate with humans to collaboratively carry out the plan. On the one hand, we show that a trade-off exists between the way articulated or flexible objects are perceived and how the system represents them. Such a trade-off greatly impacts on the complexity of the planning process. On the other hand, we demonstrate the system's capabilities in allowing humans to interrupt robot action execution, and - in general - to contribute to the whole manipulation process. Results related to planning performance are discussed, and examples of a Baxter dual-arm manipulator performing actions collaboratively with humans are shown.