 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhat if? Causal Machine Learning in Supply Chain Risk Management
Aug 24, 2024



The penultimate goal for developing machine learning models in supply chain management is to make optimal interventions. However, most machine learning models identify correlations in data rather than inferring causation, making it difficult to systematically plan for better outcomes. In this article, we propose and evaluate the use of causal machine learning for developing supply chain risk intervention models, and demonstrate its use with a case study in supply chain risk management in the maritime engineering sector. Our findings highlight that causal machine learning enhances decision-making processes by identifying changes that can be achieved under different supply chain interventions, allowing "what-if" scenario planning. We therefore propose different machine learning developmental pathways for for predicting risk, and planning for interventions to minimise risk and outline key steps for supply chain researchers to explore causal machine learning.
Trustworthy, responsible, ethical AI in manufacturing and supply chains: synthesis and emerging research questions
May 19, 2023While the increased use of AI in the manufacturing sector has been widely noted, there is little understanding on the risks that it may raise in a manufacturing organisation. Although various high level frameworks and definitions have been proposed to consolidate potential risks, practitioners struggle with understanding and implementing them. This lack of understanding exposes manufacturing to a multitude of risks, including the organisation, its workers, as well as suppliers and clients. In this paper, we explore and interpret the applicability of responsible, ethical, and trustworthy AI within the context of manufacturing. We then use a broadened adaptation of a machine learning lifecycle to discuss, through the use of illustrative examples, how each step may result in a given AI trustworthiness concern. We additionally propose a number of research questions to the manufacturing research community, in order to help guide future research so that the economic and societal benefits envisaged by AI in manufacturing are delivered safely and responsibly.
Reformulation Techniques for Automated Planning: A Systematic Review
Jan 30, 2023Automated planning is a prominent area of Artificial Intelligence, and an important component for intelligent autonomous agents. A cornerstone of domain-independent planning is the separation between planning logic, i.e. the automated reasoning side, and the knowledge model, that encodes a formal representation of domain knowledge needed to reason upon a given problem to synthesise a solution plan. Such a separation enables the use of reformulation techniques, which transform how a model is represented in order to improve the efficiency of plan generation. Over the past decades, significant research effort has been devoted to the design of reformulation techniques. In this paper, we present a systematic review of the large body of work on reformulation techniques for classical planning, aiming to provide a holistic view of the field and to foster future research in the area. As a tangible outcome, we provide a qualitative comparison of the existing classes of techniques, that can help researchers gain an overview of their strengths and weaknesses.
Modal Logic S5 Satisfiability in Answer Set Programming
Aug 09, 2021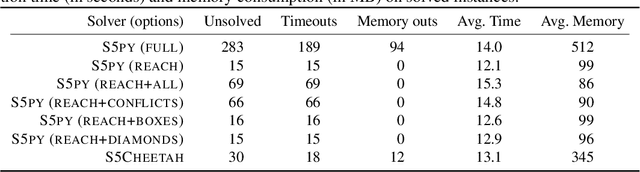

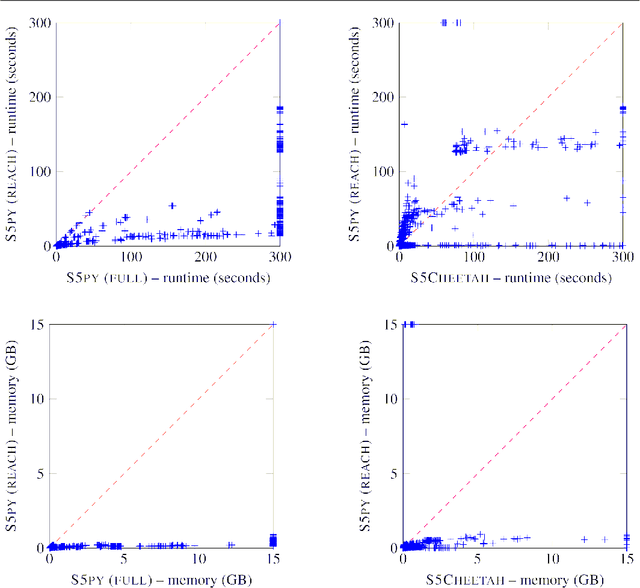

Modal logic S5 has attracted significant attention and has led to several practical applications, owing to its simplified approach to dealing with nesting modal operators. Efficient implementations for evaluating satisfiability of S5 formulas commonly rely on Skolemisation to convert them into propositional logic formulas, essentially by introducing copies of propositional atoms for each set of interpretations (possible worlds). This approach is simple, but often results into large formulas that are too difficult to process, and therefore more parsimonious constructions are required. In this work, we propose to use Answer Set Programming for implementing such constructions, and in particular for identifying the propositional atoms that are relevant in every world by means of a reachability relation. The proposed encodings are designed to take advantage of other properties such as entailment relations of subformulas rooted by modal operators. An empirical assessment of the proposed encodings shows that the reachability relation is very effective and leads to comparable performance to a state-of-the-art S5 solver based on SAT, while entailment relations are possibly too expensive to reason about and may result in overhead. This paper is under consideration for acceptance in TPLP.
A Generalised Approach for Encoding and Reasoning with Qualitative Theories in Answer Set Programming
Aug 04, 2020Qualitative reasoning involves expressing and deriving knowledge based on qualitative terms such as natural language expressions, rather than strict mathematical quantities. Well over 40 qualitative calculi have been proposed so far, mostly in the spatial and temporal domains, with several practical applications such as naval traffic monitoring, warehouse process optimisation and robot manipulation. Even if a number of specialised qualitative reasoning tools have been developed so far, an important barrier to the wider adoption of these tools is that only qualitative reasoning is supported natively, when real-world problems most often require a combination of qualitative and other forms of reasoning. In this work, we propose to overcome this barrier by using ASP as a unifying formalism to tackle problems that require qualitative reasoning in addition to non-qualitative reasoning. A family of ASP encodings is proposed which can handle any qualitative calculus with binary relations. These encodings are experimentally evaluated using a real-world dataset based on a case study of determining optimal coverage of telecommunication antennas, and compared with the performance of two well-known dedicated reasoners. Experimental results show that the proposed encodings outperform one of the two reasoners, but fall behind the other, an acceptable trade-off given the added benefits of handling any type of reasoning as well as the interpretability of logic programs. This paper is under consideration for acceptance in TPLP.
A Trajectory Calculus for Qualitative Spatial Reasoning Using Answer Set Programming
Apr 19, 2018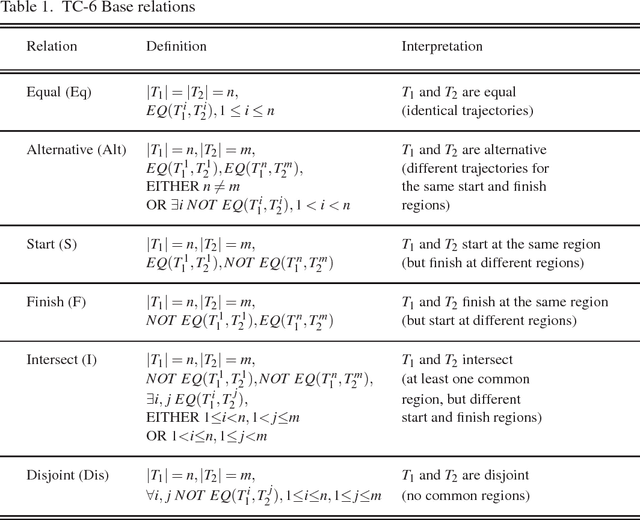
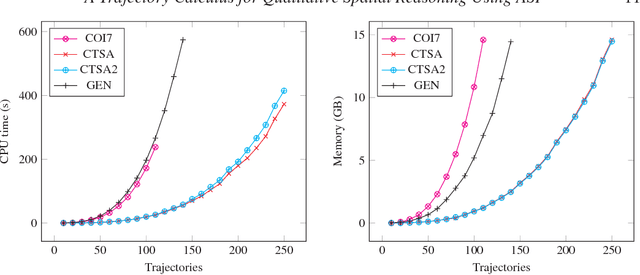
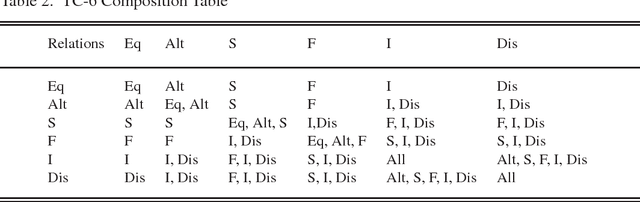
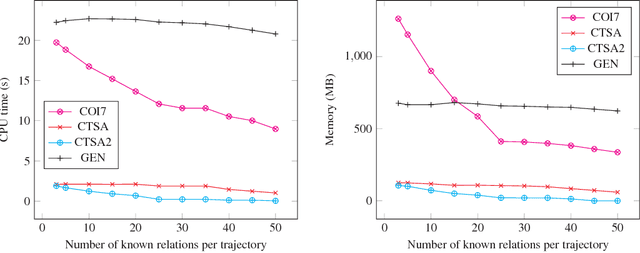
Spatial information is often expressed using qualitative terms such as natural language expressions instead of coordinates; reasoning over such terms has several practical applications, such as bus routes planning. Representing and reasoning on trajectories is a specific case of qualitative spatial reasoning that focuses on moving objects and their paths. In this work, we propose two versions of a trajectory calculus based on the allowed properties over trajectories, where trajectories are defined as a sequence of non-overlapping regions of a partitioned map. More specifically, if a given trajectory is allowed to start and finish at the same region, 6 base relations are defined (TC-6). If a given trajectory should have different start and finish regions but cycles are allowed within, 10 base relations are defined (TC-10). Both versions of the calculus are implemented as ASP programs; we propose several different encodings, including a generalised program capable of encoding any qualitative calculus in ASP. All proposed encodings are experimentally evaluated using a real-world dataset. Experiment results show that the best performing implementation can scale up to an input of 250 trajectories for TC-6 and 150 trajectories for TC-10 for the problem of discovering a consistent configuration, a significant improvement compared to previous ASP implementations for similar qualitative spatial and temporal calculi. This manuscript is under consideration for acceptance in TPLP.