 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGazeGrasp: DNN-Driven Robotic Grasping with Wearable Eye-Gaze Interface
Jan 14, 2025



We present GazeGrasp, a gaze-based manipulation system enabling individuals with motor impairments to control collaborative robots using eye-gaze. The system employs an ESP32 CAM for eye tracking, MediaPipe for gaze detection, and YOLOv8 for object localization, integrated with a Universal Robot UR10 for manipulation tasks. After user-specific calibration, the system allows intuitive object selection with a magnetic snapping effect and robot control via eye gestures. Experimental evaluation involving 13 participants demonstrated that the magnetic snapping effect significantly reduced gaze alignment time, improving task efficiency by 31%. GazeGrasp provides a robust, hands-free interface for assistive robotics, enhancing accessibility and autonomy for users.
Shake-VLA: Vision-Language-Action Model-Based System for Bimanual Robotic Manipulations and Liquid Mixing
Jan 12, 2025


This paper introduces Shake-VLA, a Vision-Language-Action (VLA) model-based system designed to enable bimanual robotic manipulation for automated cocktail preparation. The system integrates a vision module for detecting ingredient bottles and reading labels, a speech-to-text module for interpreting user commands, and a language model to generate task-specific robotic instructions. Force Torque (FT) sensors are employed to precisely measure the quantity of liquid poured, ensuring accuracy in ingredient proportions during the mixing process. The system architecture includes a Retrieval-Augmented Generation (RAG) module for accessing and adapting recipes, an anomaly detection mechanism to address ingredient availability issues, and bimanual robotic arms for dexterous manipulation. Experimental evaluations demonstrated a high success rate across system components, with the speech-to-text module achieving a 93% success rate in noisy environments, the vision module attaining a 91% success rate in object and label detection in cluttered environment, the anomaly module successfully identified 95% of discrepancies between detected ingredients and recipe requirements, and the system achieved an overall success rate of 100% in preparing cocktails, from recipe formulation to action generation.
Industry 6.0: New Generation of Industry driven by Generative AI and Swarm of Heterogeneous Robots
Sep 16, 2024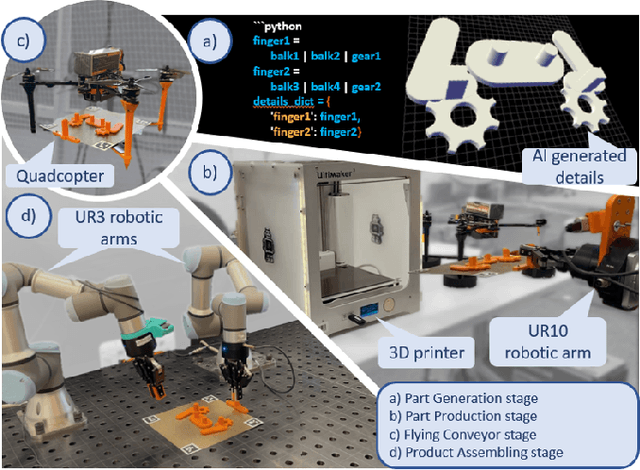
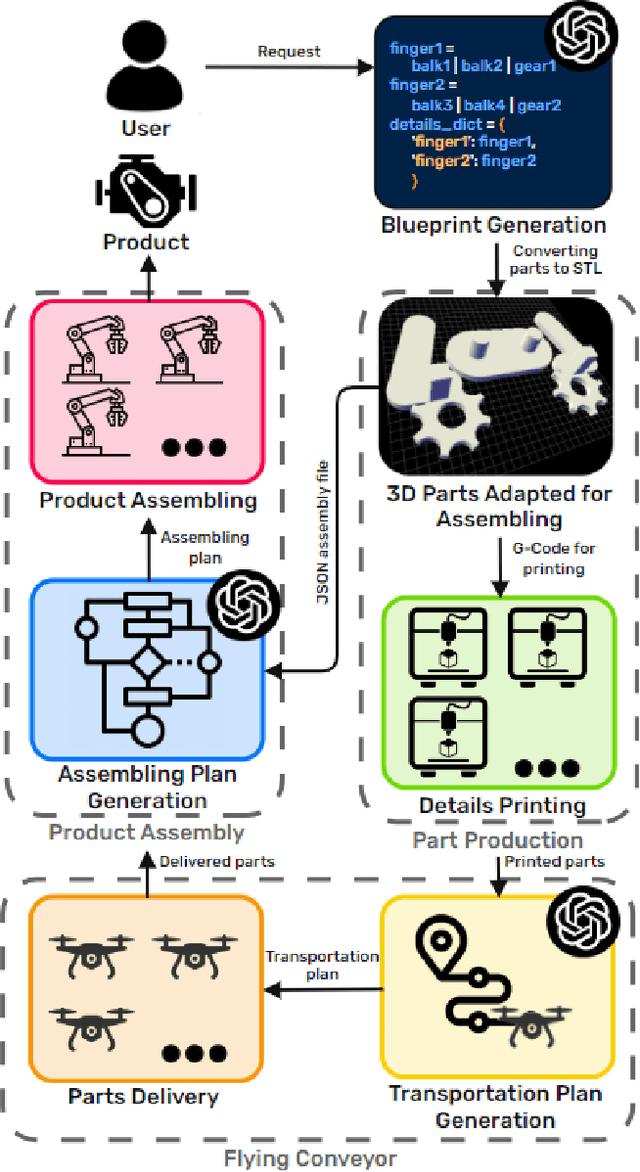
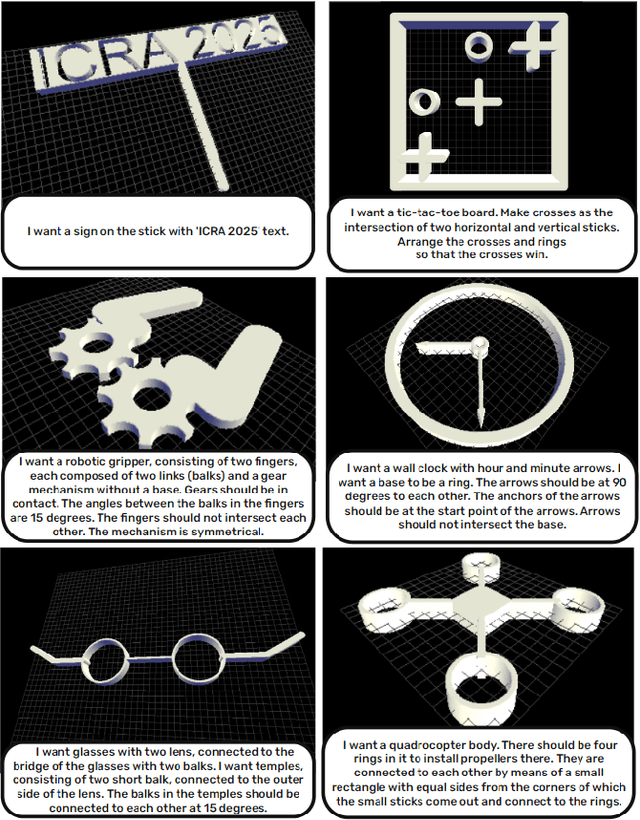
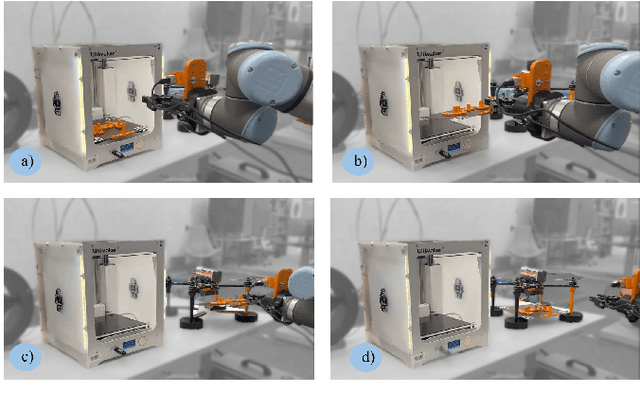
This paper presents the concept of Industry 6.0, introducing the world's first fully automated production system that autonomously handles the entire product design and manufacturing process based on user-provided natural language descriptions. By leveraging generative AI, the system automates critical aspects of production, including product blueprint design, component manufacturing, logistics, and assembly. A heterogeneous swarm of robots, each equipped with individual AI through integration with Large Language Models (LLMs), orchestrates the production process. The robotic system includes manipulator arms, delivery drones, and 3D printers capable of generating assembly blueprints. The system was evaluated using commercial and open-source LLMs, functioning through APIs and local deployment. A user study demonstrated that the system reduces the average production time to 119.10 minutes, significantly outperforming a team of expert human developers, who averaged 528.64 minutes (an improvement factor of 4.4). Furthermore, in the product blueprinting stage, the system surpassed human CAD operators by an unprecedented factor of 47, completing the task in 0.5 minutes compared to 23.5 minutes. This breakthrough represents a major leap towards fully autonomous manufacturing.
An Asymptotically-Optimal Sampling-Based Algorithm for Bi-directional Motion Planning
Jul 27, 2015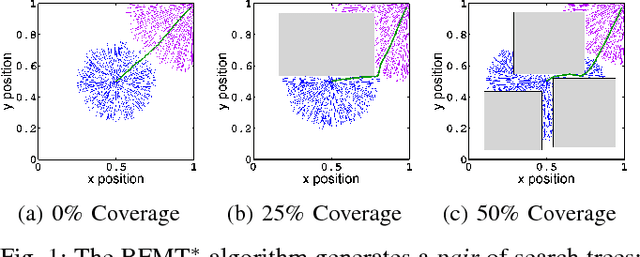
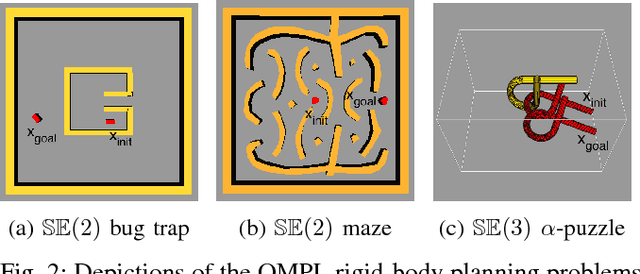
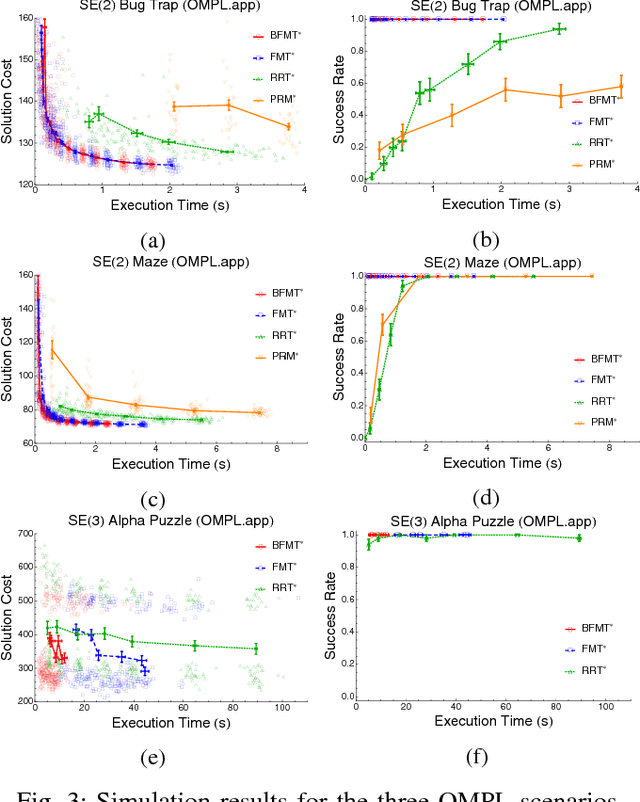
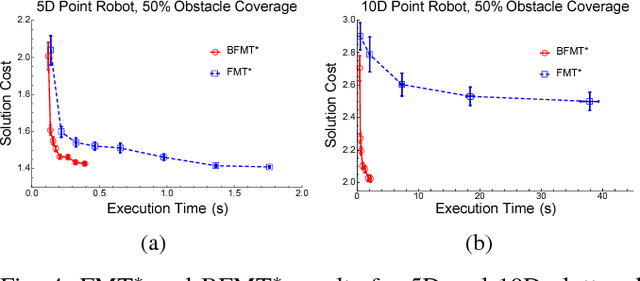
Bi-directional search is a widely used strategy to increase the success and convergence rates of sampling-based motion planning algorithms. Yet, few results are available that merge both bi-directional search and asymptotic optimality into existing optimal planners, such as PRM*, RRT*, and FMT*. The objective of this paper is to fill this gap. Specifically, this paper presents a bi-directional, sampling-based, asymptotically-optimal algorithm named Bi-directional FMT* (BFMT*) that extends the Fast Marching Tree (FMT*) algorithm to bi-directional search while preserving its key properties, chiefly lazy search and asymptotic optimality through convergence in probability. BFMT* performs a two-source, lazy dynamic programming recursion over a set of randomly-drawn samples, correspondingly generating two search trees: one in cost-to-come space from the initial configuration and another in cost-to-go space from the goal configuration. Numerical experiments illustrate the advantages of BFMT* over its unidirectional counterpart, as well as a number of other state-of-the-art planners.
Fast Methods for Eikonal Equations: an Experimental Survey
Jun 11, 2015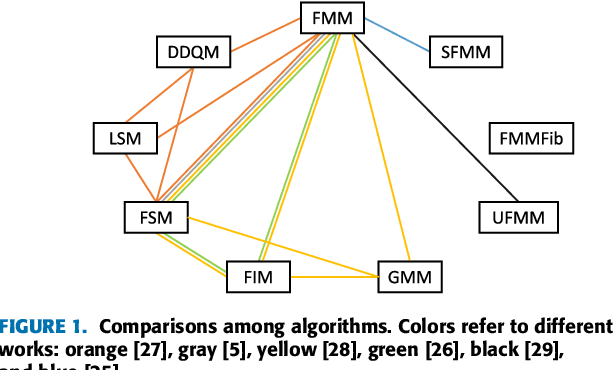
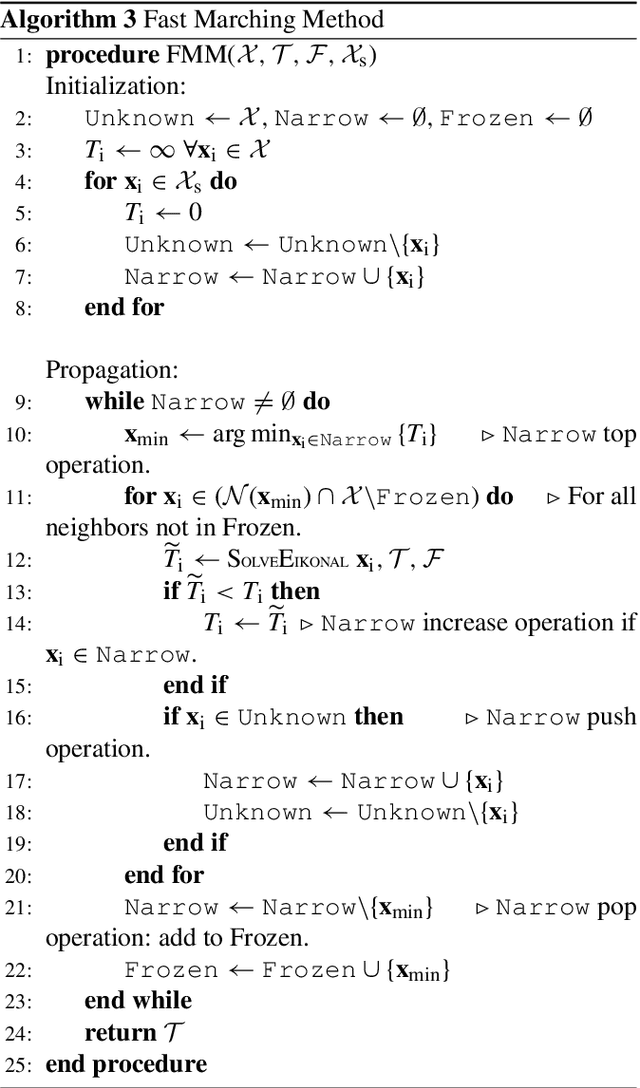
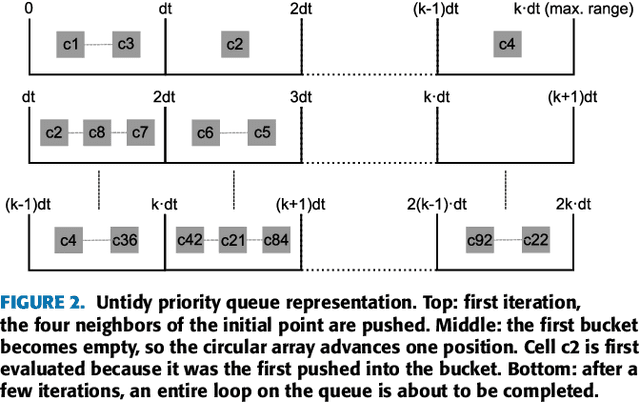
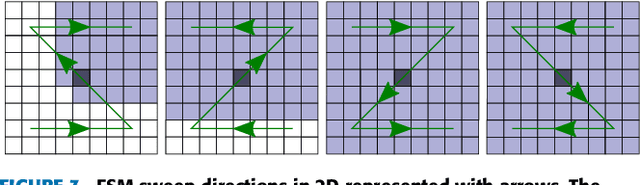
The Fast Marching Method is a very popular algorithm to compute times-of-arrival maps (distances map measured in time units). Since their proposal in 1995, it has been applied to many different applications such as robotics, medical computer vision, fluid simulation, etc. Many alternatives have been proposed with two main objectives: to reduce its computational time and to improve its accuracy. In this paper, we collect the main approaches which improve the computational time of the standard Fast Marching Method, focusing on single-threaded methods and isotropic environments. 9 different methods are studied under a common mathematical framework and experimentally in representative environments: Fast Marching Method with binary heap, Fast Marching Method with Fibonacci Heap, Simplified Fast Marching Method, Untidy Fast Marching Method, Fast Iterative Method, Group Marching Method, Fast Sweeping Method, Lock Sweeping Method and Double Dynamic Queue Method.