 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVDT-Auto: End-to-end Autonomous Driving with VLM-Guided Diffusion Transformers
Feb 27, 2025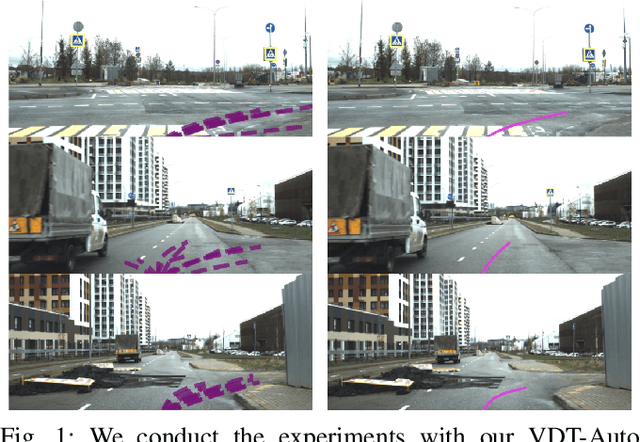

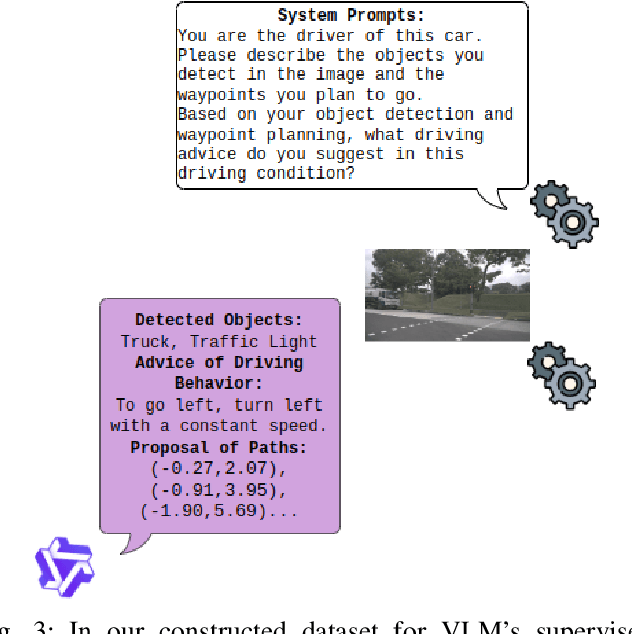

In autonomous driving, dynamic environment and corner cases pose significant challenges to the robustness of ego vehicle's decision-making. To address these challenges, commencing with the representation of state-action mapping in the end-to-end autonomous driving paradigm, we introduce a novel pipeline, VDT-Auto. Leveraging the advancement of the state understanding of Visual Language Model (VLM), incorporating with diffusion Transformer-based action generation, our VDT-Auto parses the environment geometrically and contextually for the conditioning of the diffusion process. Geometrically, we use a bird's-eye view (BEV) encoder to extract feature grids from the surrounding images. Contextually, the structured output of our fine-tuned VLM is processed into textual embeddings and noisy paths. During our diffusion process, the added noise for the forward process is sampled from the noisy path output of the fine-tuned VLM, while the extracted BEV feature grids and embedded texts condition the reverse process of our diffusion Transformers. Our VDT-Auto achieved 0.52m on average L2 errors and 21% on average collision rate in the nuScenes open-loop planning evaluation. Moreover, the real-world demonstration exhibited prominent generalizability of our VDT-Auto. The code and dataset will be released after acceptance.
Shake-VLA: Vision-Language-Action Model-Based System for Bimanual Robotic Manipulations and Liquid Mixing
Jan 12, 2025


This paper introduces Shake-VLA, a Vision-Language-Action (VLA) model-based system designed to enable bimanual robotic manipulation for automated cocktail preparation. The system integrates a vision module for detecting ingredient bottles and reading labels, a speech-to-text module for interpreting user commands, and a language model to generate task-specific robotic instructions. Force Torque (FT) sensors are employed to precisely measure the quantity of liquid poured, ensuring accuracy in ingredient proportions during the mixing process. The system architecture includes a Retrieval-Augmented Generation (RAG) module for accessing and adapting recipes, an anomaly detection mechanism to address ingredient availability issues, and bimanual robotic arms for dexterous manipulation. Experimental evaluations demonstrated a high success rate across system components, with the speech-to-text module achieving a 93% success rate in noisy environments, the vision module attaining a 91% success rate in object and label detection in cluttered environment, the anomaly module successfully identified 95% of discrepancies between detected ingredients and recipe requirements, and the system achieved an overall success rate of 100% in preparing cocktails, from recipe formulation to action generation.
FlightAR: AR Flight Assistance Interface with Multiple Video Streams and Object Detection Aimed at Immersive Drone Control
Oct 22, 2024



The swift advancement of unmanned aerial vehicle (UAV) technologies necessitates new standards for developing human-drone interaction (HDI) interfaces. Most interfaces for HDI, especially first-person view (FPV) goggles, limit the operator's ability to obtain information from the environment. This paper presents a novel interface, FlightAR, that integrates augmented reality (AR) overlays of UAV first-person view (FPV) and bottom camera feeds with head-mounted display (HMD) to enhance the pilot's situational awareness. Using FlightAR, the system provides pilots not only with a video stream from several UAV cameras simultaneously, but also the ability to observe their surroundings in real time. User evaluation with NASA-TLX and UEQ surveys showed low physical demand ($\mu=1.8$, $SD = 0.8$) and good performance ($\mu=3.4$, $SD = 0.8$), proving better user assessments in comparison with baseline FPV goggles. Participants also rated the system highly for stimulation ($\mu=2.35$, $SD = 0.9$), novelty ($\mu=2.1$, $SD = 0.9$) and attractiveness ($\mu=1.97$, $SD = 1$), indicating positive user experiences. These results demonstrate the potential of the system to improve UAV piloting experience through enhanced situational awareness and intuitive control. The code is available here: https://github.com/Sautenich/FlightAR
FADet: A Multi-sensor 3D Object Detection Network based on Local Featured Attention
May 19, 2024Camera, LiDAR and radar are common perception sensors for autonomous driving tasks. Robust prediction of 3D object detection is optimally based on the fusion of these sensors. To exploit their abilities wisely remains a challenge because each of these sensors has its own characteristics. In this paper, we propose FADet, a multi-sensor 3D detection network, which specifically studies the characteristics of different sensors based on our local featured attention modules. For camera images, we propose dual-attention-based sub-module. For LiDAR point clouds, triple-attention-based sub-module is utilized while mixed-attention-based sub-module is applied for features of radar points. With local featured attention sub-modules, our FADet has effective detection results in long-tail and complex scenes from camera, LiDAR and radar input. On NuScenes validation dataset, FADet achieves state-of-the-art performance on LiDAR-camera object detection tasks with 71.8% NDS and 69.0% mAP, at the same time, on radar-camera object detection tasks with 51.7% NDS and 40.3% mAP. Code will be released at https://github.com/ZionGo6/FADet.