 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVDT-Auto: End-to-end Autonomous Driving with VLM-Guided Diffusion Transformers
Feb 27, 2025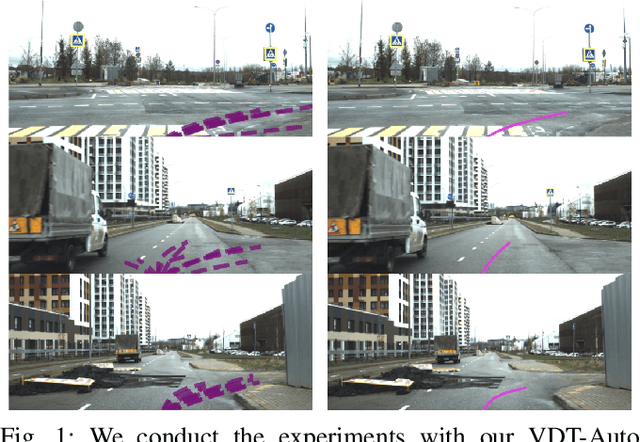

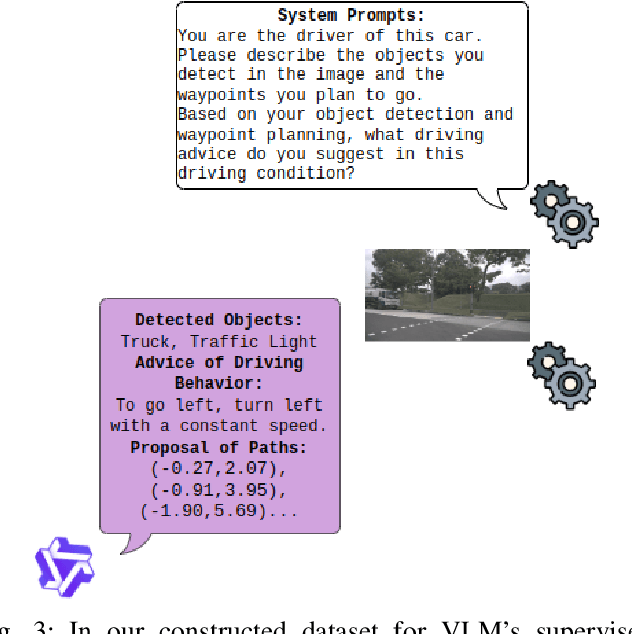

In autonomous driving, dynamic environment and corner cases pose significant challenges to the robustness of ego vehicle's decision-making. To address these challenges, commencing with the representation of state-action mapping in the end-to-end autonomous driving paradigm, we introduce a novel pipeline, VDT-Auto. Leveraging the advancement of the state understanding of Visual Language Model (VLM), incorporating with diffusion Transformer-based action generation, our VDT-Auto parses the environment geometrically and contextually for the conditioning of the diffusion process. Geometrically, we use a bird's-eye view (BEV) encoder to extract feature grids from the surrounding images. Contextually, the structured output of our fine-tuned VLM is processed into textual embeddings and noisy paths. During our diffusion process, the added noise for the forward process is sampled from the noisy path output of the fine-tuned VLM, while the extracted BEV feature grids and embedded texts condition the reverse process of our diffusion Transformers. Our VDT-Auto achieved 0.52m on average L2 errors and 21% on average collision rate in the nuScenes open-loop planning evaluation. Moreover, the real-world demonstration exhibited prominent generalizability of our VDT-Auto. The code and dataset will be released after acceptance.
FADet: A Multi-sensor 3D Object Detection Network based on Local Featured Attention
May 19, 2024Camera, LiDAR and radar are common perception sensors for autonomous driving tasks. Robust prediction of 3D object detection is optimally based on the fusion of these sensors. To exploit their abilities wisely remains a challenge because each of these sensors has its own characteristics. In this paper, we propose FADet, a multi-sensor 3D detection network, which specifically studies the characteristics of different sensors based on our local featured attention modules. For camera images, we propose dual-attention-based sub-module. For LiDAR point clouds, triple-attention-based sub-module is utilized while mixed-attention-based sub-module is applied for features of radar points. With local featured attention sub-modules, our FADet has effective detection results in long-tail and complex scenes from camera, LiDAR and radar input. On NuScenes validation dataset, FADet achieves state-of-the-art performance on LiDAR-camera object detection tasks with 71.8% NDS and 69.0% mAP, at the same time, on radar-camera object detection tasks with 51.7% NDS and 40.3% mAP. Code will be released at https://github.com/ZionGo6/FADet.
Co-driver: VLM-based Autonomous Driving Assistant with Human-like Behavior and Understanding for Complex Road Scenes
May 09, 2024



Recent research about Large Language Model based autonomous driving solutions shows a promising picture in planning and control fields. However, heavy computational resources and hallucinations of Large Language Models continue to hinder the tasks of predicting precise trajectories and instructing control signals. To address this problem, we propose Co-driver, a novel autonomous driving assistant system to empower autonomous vehicles with adjustable driving behaviors based on the understanding of road scenes. A pipeline involving the CARLA simulator and Robot Operating System 2 (ROS2) verifying the effectiveness of our system is presented, utilizing a single Nvidia 4090 24G GPU while exploiting the capacity of textual output of the Visual Language Model. Besides, we also contribute a dataset containing an image set and a corresponding prompt set for fine-tuning the Visual Language Model module of our system. In the real-world driving dataset, our system achieved 96.16% success rate in night scenes and 89.7% in gloomy scenes regarding reasonable predictions. Our Co-driver dataset will be released at https://github.com/ZionGo6/Co-driver.