 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeListen, Look, Drive: Coupling Audio Instructions for User-aware VLA-based Autonomous Driving
Jan 17, 2026Vision Language Action (VLA) models promise an open-vocabulary interface that can translate perceptual ambiguity into semantically grounded driving decisions, yet they still treat language as a static prior fixed at inference time. As a result, the model must infer continuously shifting objectives from pixels alone, yielding delayed or overly conservative maneuvers. We argue that effective VLAs for autonomous driving need an online channel in which users can influence driving with specific intentions. To this end, we present EchoVLA, a user-aware VLA that couples camera streams with in situ audio instructions. We augment the nuScenes dataset with temporally aligned, intent-specific speech commands generated by converting ego-motion descriptions into synthetic audios. Further, we compose emotional speech-trajectory pairs into a multimodal Chain-of-Thought (CoT) for fine-tuning a Multimodal Large Model (MLM) based on Qwen2.5-Omni. Specifically, we synthesize the audio-augmented dataset with different emotion types paired with corresponding driving behaviors, leveraging the emotional cues embedded in tone, pitch, and speech tempo to reflect varying user states, such as urgent or hesitant intentions, thus enabling our EchoVLA to interpret not only the semantic content but also the emotional context of audio commands for more nuanced and emotionally adaptive driving behavior. In open-loop benchmarks, our approach reduces the average L2 error by $59.4\%$ and the collision rate by $74.4\%$ compared to the baseline of vision-only perception. More experiments on nuScenes dataset validate that EchoVLA not only steers the trajectory through audio instructions, but also modulates driving behavior in response to the emotions detected in the user's speech.
SwarmVLM: VLM-Guided Impedance Control for Autonomous Navigation of Heterogeneous Robots in Dynamic Warehousing
Aug 11, 2025With the growing demand for efficient logistics, unmanned aerial vehicles (UAVs) are increasingly being paired with automated guided vehicles (AGVs). While UAVs offer the ability to navigate through dense environments and varying altitudes, they are limited by battery life, payload capacity, and flight duration, necessitating coordinated ground support. Focusing on heterogeneous navigation, SwarmVLM addresses these limitations by enabling semantic collaboration between UAVs and ground robots through impedance control. The system leverages the Vision Language Model (VLM) and the Retrieval-Augmented Generation (RAG) to adjust impedance control parameters in response to environmental changes. In this framework, the UAV acts as a leader using Artificial Potential Field (APF) planning for real-time navigation, while the ground robot follows via virtual impedance links with adaptive link topology to avoid collisions with short obstacles. The system demonstrated a 92% success rate across 12 real-world trials. Under optimal lighting conditions, the VLM-RAG framework achieved 8% accuracy in object detection and selection of impedance parameters. The mobile robot prioritized short obstacle avoidance, occasionally resulting in a lateral deviation of up to 50 cm from the UAV path, which showcases safe navigation in a cluttered setting.
VDT-Auto: End-to-end Autonomous Driving with VLM-Guided Diffusion Transformers
Feb 27, 2025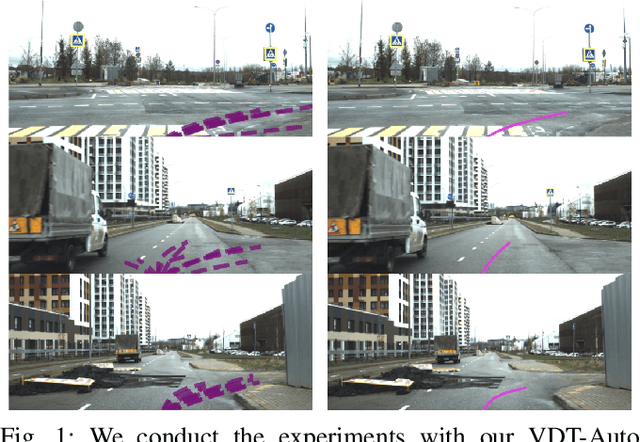

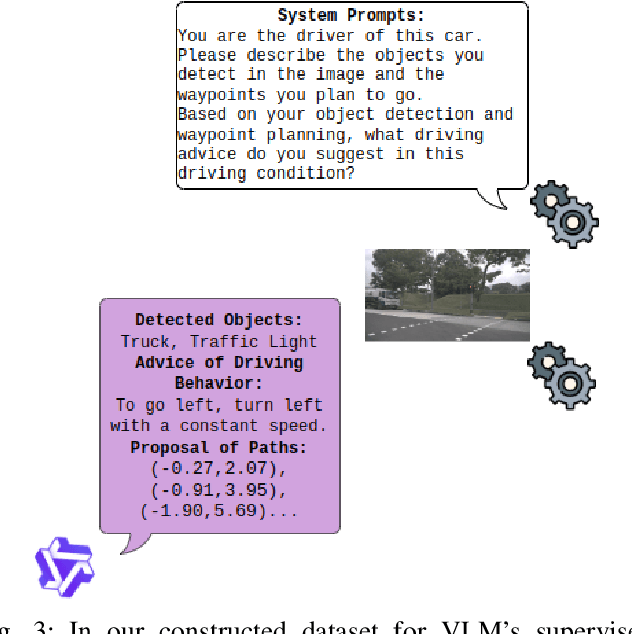

In autonomous driving, dynamic environment and corner cases pose significant challenges to the robustness of ego vehicle's decision-making. To address these challenges, commencing with the representation of state-action mapping in the end-to-end autonomous driving paradigm, we introduce a novel pipeline, VDT-Auto. Leveraging the advancement of the state understanding of Visual Language Model (VLM), incorporating with diffusion Transformer-based action generation, our VDT-Auto parses the environment geometrically and contextually for the conditioning of the diffusion process. Geometrically, we use a bird's-eye view (BEV) encoder to extract feature grids from the surrounding images. Contextually, the structured output of our fine-tuned VLM is processed into textual embeddings and noisy paths. During our diffusion process, the added noise for the forward process is sampled from the noisy path output of the fine-tuned VLM, while the extracted BEV feature grids and embedded texts condition the reverse process of our diffusion Transformers. Our VDT-Auto achieved 0.52m on average L2 errors and 21% on average collision rate in the nuScenes open-loop planning evaluation. Moreover, the real-world demonstration exhibited prominent generalizability of our VDT-Auto. The code and dataset will be released after acceptance.
Industry 6.0: New Generation of Industry driven by Generative AI and Swarm of Heterogeneous Robots
Sep 16, 2024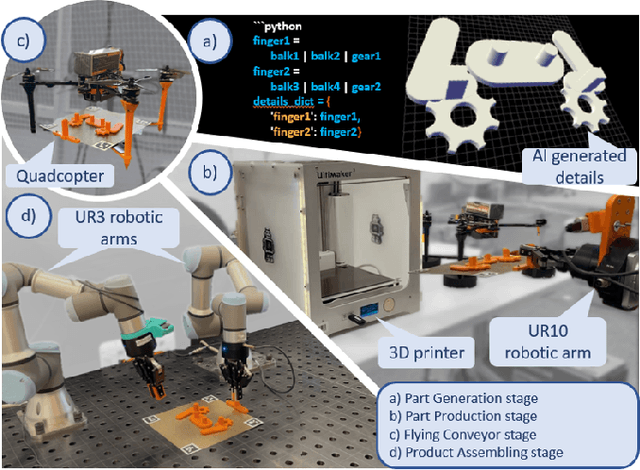
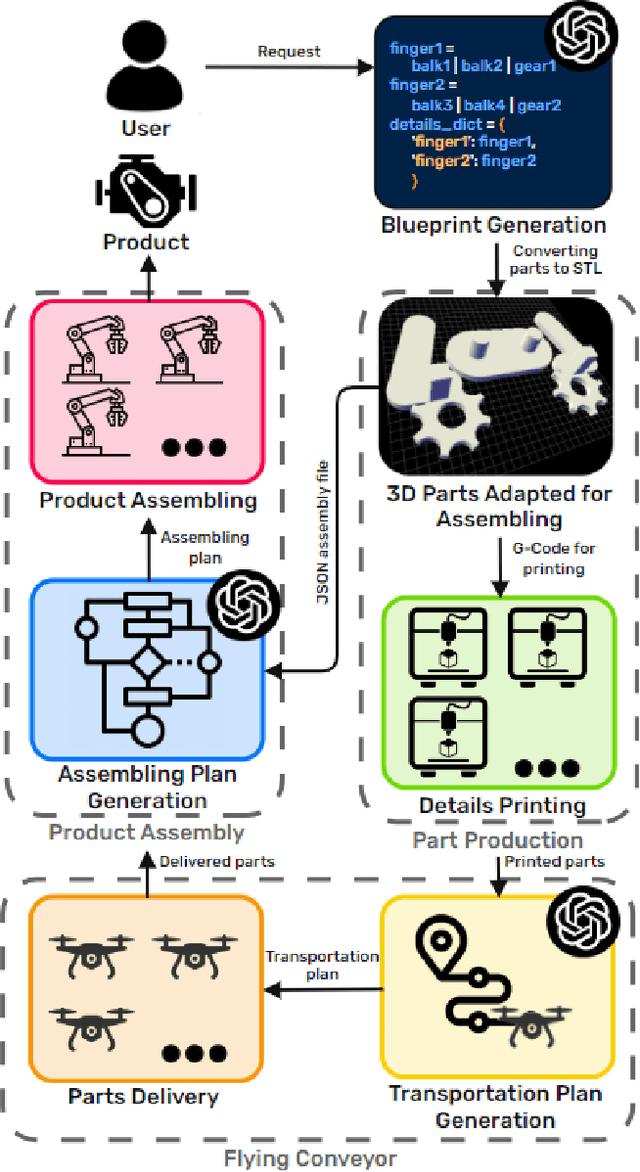
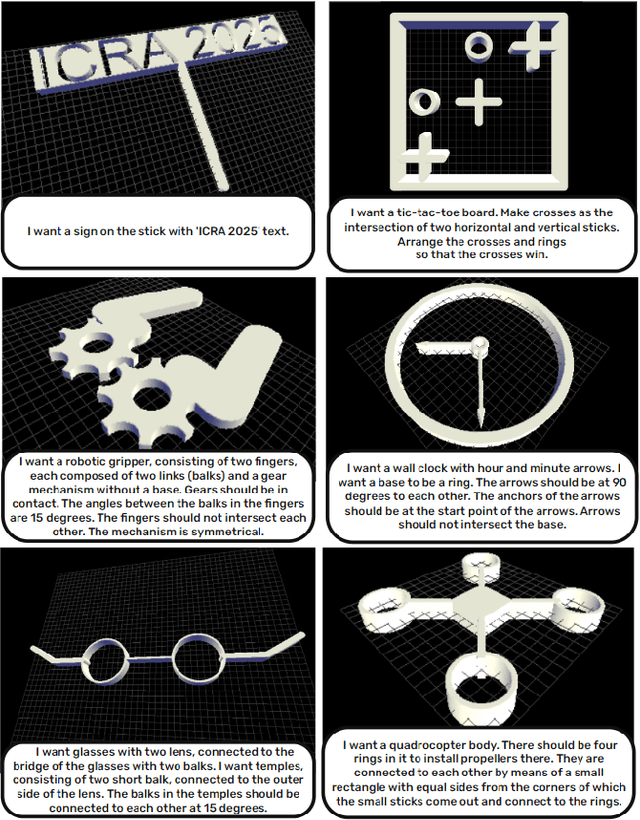
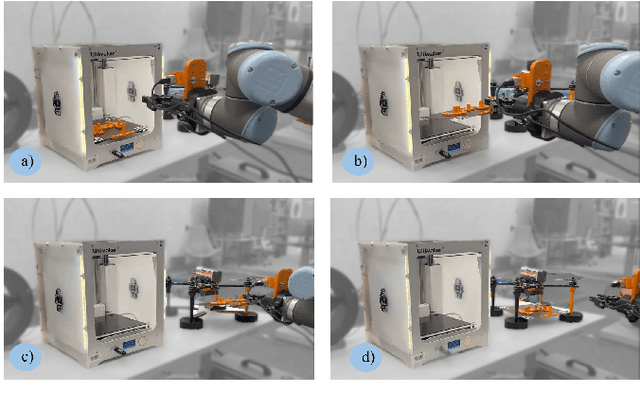
This paper presents the concept of Industry 6.0, introducing the world's first fully automated production system that autonomously handles the entire product design and manufacturing process based on user-provided natural language descriptions. By leveraging generative AI, the system automates critical aspects of production, including product blueprint design, component manufacturing, logistics, and assembly. A heterogeneous swarm of robots, each equipped with individual AI through integration with Large Language Models (LLMs), orchestrates the production process. The robotic system includes manipulator arms, delivery drones, and 3D printers capable of generating assembly blueprints. The system was evaluated using commercial and open-source LLMs, functioning through APIs and local deployment. A user study demonstrated that the system reduces the average production time to 119.10 minutes, significantly outperforming a team of expert human developers, who averaged 528.64 minutes (an improvement factor of 4.4). Furthermore, in the product blueprinting stage, the system surpassed human CAD operators by an unprecedented factor of 47, completing the task in 0.5 minutes compared to 23.5 minutes. This breakthrough represents a major leap towards fully autonomous manufacturing.
FADet: A Multi-sensor 3D Object Detection Network based on Local Featured Attention
May 19, 2024Camera, LiDAR and radar are common perception sensors for autonomous driving tasks. Robust prediction of 3D object detection is optimally based on the fusion of these sensors. To exploit their abilities wisely remains a challenge because each of these sensors has its own characteristics. In this paper, we propose FADet, a multi-sensor 3D detection network, which specifically studies the characteristics of different sensors based on our local featured attention modules. For camera images, we propose dual-attention-based sub-module. For LiDAR point clouds, triple-attention-based sub-module is utilized while mixed-attention-based sub-module is applied for features of radar points. With local featured attention sub-modules, our FADet has effective detection results in long-tail and complex scenes from camera, LiDAR and radar input. On NuScenes validation dataset, FADet achieves state-of-the-art performance on LiDAR-camera object detection tasks with 71.8% NDS and 69.0% mAP, at the same time, on radar-camera object detection tasks with 51.7% NDS and 40.3% mAP. Code will be released at https://github.com/ZionGo6/FADet.
Co-driver: VLM-based Autonomous Driving Assistant with Human-like Behavior and Understanding for Complex Road Scenes
May 09, 2024



Recent research about Large Language Model based autonomous driving solutions shows a promising picture in planning and control fields. However, heavy computational resources and hallucinations of Large Language Models continue to hinder the tasks of predicting precise trajectories and instructing control signals. To address this problem, we propose Co-driver, a novel autonomous driving assistant system to empower autonomous vehicles with adjustable driving behaviors based on the understanding of road scenes. A pipeline involving the CARLA simulator and Robot Operating System 2 (ROS2) verifying the effectiveness of our system is presented, utilizing a single Nvidia 4090 24G GPU while exploiting the capacity of textual output of the Visual Language Model. Besides, we also contribute a dataset containing an image set and a corresponding prompt set for fine-tuning the Visual Language Model module of our system. In the real-world driving dataset, our system achieved 96.16% success rate in night scenes and 89.7% in gloomy scenes regarding reasonable predictions. Our Co-driver dataset will be released at https://github.com/ZionGo6/Co-driver.
HawkDrive: A Transformer-driven Visual Perception System for Autonomous Driving in Night Scene
Apr 06, 2024

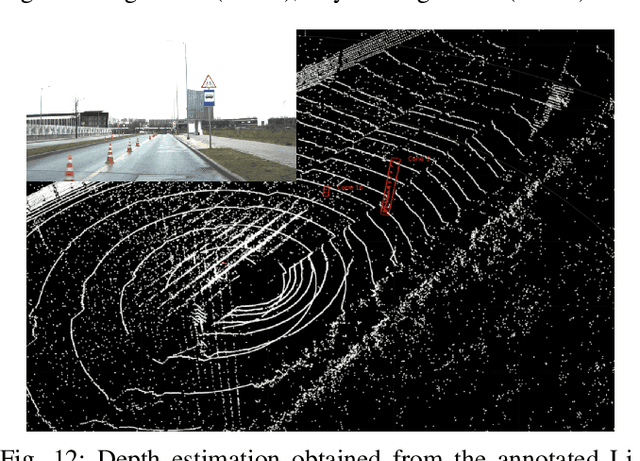

Many established vision perception systems for autonomous driving scenarios ignore the influence of light conditions, one of the key elements for driving safety. To address this problem, we present HawkDrive, a novel perception system with hardware and software solutions. Hardware that utilizes stereo vision perception, which has been demonstrated to be a more reliable way of estimating depth information than monocular vision, is partnered with the edge computing device Nvidia Jetson Xavier AGX. Our software for low light enhancement, depth estimation, and semantic segmentation tasks, is a transformer-based neural network. Our software stack, which enables fast inference and noise reduction, is packaged into system modules in Robot Operating System 2 (ROS2). Our experimental results have shown that the proposed end-to-end system is effective in improving the depth estimation and semantic segmentation performance. Our dataset and codes will be released at https://github.com/ZionGo6/HawkDrive.