 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGoalVLM: VLM-driven Object Goal Navigation for Multi-Agent System
Mar 18, 2026Object-goal navigation has traditionally been limited to ground robots with closed-set object vocabularies. Existing multi-agent approaches depend on precomputed probabilistic graphs tied to fixed category sets, precluding generalization to novel goals at test time. We present GoalVLM, a cooperative multi-agent framework for zero-shot, open-vocabulary object navigation. GoalVLM integrates a Vision-Language Model (VLM) directly into the decision loop, SAM3 for text-prompted detection and segmentation, and SpaceOM for spatial reasoning, enabling agents to interpret free-form language goals and score frontiers via zero-shot semantic priors without retraining. Each agent builds a BEV semantic map from depth-projected voxel splatting, while a Goal Projector back-projects detections through calibrated depth into the map for reliable goal localization. A constraint-guided reasoning layer evaluates frontiers through a structured prompt chain (scene captioning, room-type classification, perception gating, multi-frontier ranking), injecting commonsense priors into exploration. We evaluate GoalVLM on GOAT-Bench val_unseen (360 multi-subtask episodes, 1032 sequential object-goal subtasks, HM3D scenes), where each episode requires navigating to a chain of 5-7 open-vocabulary targets. GoalVLM with N=2 agents achieves 55.8% subtask SR and 18.3% SPL, competitive with state-of-the-art methods while requiring no task-specific training. Ablation studies confirm the contributions of VLM-guided frontier reasoning and depth-projected goal localization.
GoalSwarm: Multi-UAV Semantic Coordination for Open-Vocabulary Object Navigation
Mar 16, 2026Cooperative visual semantic navigation is a foundational capability for aerial robot teams operating in unknown environments. However, achieving robust open-vocabulary object-goal navigation remains challenging due to the computational constraints of deploying heavy perception models onboard and the complexity of decentralized multi-agent coordination. We present GoalSwarm, a fully decentralized multi-UAV framework for zero-shot semantic object-goal navigation. Each UAV collaboratively constructs a shared, lightweight 2D top-down semantic occupancy map by projecting depth observations from aerial vantage points, eliminating the computational burden of full 3D representations while preserving essential geometric and semantic structure. The core contributions of GoalSwarm are threefold: (1) integration of zero-shot foundation model -- SAM3 for open vocabulary detection and pixel-level segmentation, enabling open-vocabulary target identification without task-specific training; (2) a Bayesian Value Map that fuses multi-viewpoint detection confidences into a per-pixel goal-relevance distribution, enabling informed frontier scoring via Upper Confidence Bound (UCB) exploration; and (3) a decentralized coordination strategy combining semantic frontier extraction, cost-utility bidding with geodesic path costs, and spatial separation penalties to minimize redundant exploration across the swarm.
ImpedanceDiffusion: Diffusion-Based Global Path Planning for UAV Swarm Navigation with Generative Impedance Control
Mar 10, 2026Safe swarm navigation in cluttered indoor environment requires long-horizon planning, reactive obstacle avoidance, and adaptive compliance. We propose ImpedanceDiffusion, a hierarchical framework that leverages image-conditioned diffusion-based global path planning with Artificial Potential Field (APF) tracking and semantic-aware variable impedance control for aerial drone swarms. The diffusion model generates geometric global trajectories directly from RGB images without explicit map construction. These trajectories are tracked by an APF-based reactive layer, while a VLM-RAG module performs semantic obstacle classification with 90% retrieval accuracy to adapt impedance parameters for mixed obstacle environments during execution. Two diffusion planners are evaluated: (i) a top-view long-horizon planner using single-pass inference and (ii) a first-person-view (FPV) short-horizon planner deployed via a two-stage inference pipeline. Both planners achieve a 100% trajectory generation rate across twenty static and dynamic experimental configurations and are validated via zero-shot sim-to-real deployment on Crazyflie 2.1 drones through the hierarchical APF-impedance control stack. The top-view planner produces smoother trajectories that yield conservative tracking speeds of 1.0-1.2 m/s near hard obstacles and 0.6-1.0 m/s near soft obstacles. In contrast, the FPV planner generates trajectories with greater local clearance and typically higher speeds, reaching 1.4-2.0 m/s near hard obstacles and up to 1.6 m/s near soft obstacles. Across 20 experimental configurations (100 total runs), the framework achieved a 92% success rate while maintaining stable impedance-based formation control with bounded oscillations and no in-flight collisions, demonstrating reliable and adaptive swarm navigation in cluttered indoor environments.
Hybrid F' and ROS2 Architecture for Vision-Based Autonomous Flight: Design and Experimental Validation
Feb 17, 2026Autonomous aerospace systems require architectures that balance deterministic real-time control with advanced perception capabilities. This paper presents an integrated system combining NASA's F' flight software framework with ROS2 middleware via Protocol Buffers bridging. We evaluate the architecture through a 32.25-minute indoor quadrotor flight test using vision-based navigation. The vision system achieved 87.19 Hz position estimation with 99.90\% data continuity and 11.47 ms mean latency, validating real-time performance requirements. All 15 ground commands executed successfully with 100 % success rate, demonstrating robust F'--PX4 integration. System resource utilization remained low (15.19 % CPU, 1,244 MB RAM) with zero stale telemetry messages, confirming efficient operation on embedded platforms. Results validate the feasibility of hybrid flight-software architectures combining certification-grade determinism with flexible autonomy for autonomous aerial vehicles.
DiffusionCinema: Text-to-Aerial Cinematography
Jan 24, 2026We propose a novel Unmanned Aerial Vehicles (UAV) assisted creative capture system that leverages diffusion models to interpret high-level natural language prompts and automatically generate optimal flight trajectories for cinematic video recording. Instead of manually piloting the drone, the user simply describes the desired shot (e.g., "orbit around me slowly from the right and reveal the background waterfall"). Our system encodes the prompt along with an initial visual snapshot from the onboard camera, and a diffusion model samples plausible spatio-temporal motion plans that satisfy both the scene geometry and shot semantics. The generated flight trajectory is then executed autonomously by the UAV to record smooth, repeatable video clips that match the prompt. User evaluation using NASA-TLX showed a significantly lower overall workload with our interface (M = 21.6) compared to a traditional remote controller (M = 58.1), demonstrating a substantial reduction in perceived effort. Mental demand (M = 11.5 vs. 60.5) and frustration (M = 14.0 vs. 54.5) were also markedly lower for our system, confirming clear usability advantages in autonomous text-driven flight control. This project demonstrates a new interaction paradigm: text-to-cinema flight, where diffusion models act as the "creative operator" converting story intentions directly into aerial motion.
SwarmVLM: VLM-Guided Impedance Control for Autonomous Navigation of Heterogeneous Robots in Dynamic Warehousing
Aug 11, 2025With the growing demand for efficient logistics, unmanned aerial vehicles (UAVs) are increasingly being paired with automated guided vehicles (AGVs). While UAVs offer the ability to navigate through dense environments and varying altitudes, they are limited by battery life, payload capacity, and flight duration, necessitating coordinated ground support. Focusing on heterogeneous navigation, SwarmVLM addresses these limitations by enabling semantic collaboration between UAVs and ground robots through impedance control. The system leverages the Vision Language Model (VLM) and the Retrieval-Augmented Generation (RAG) to adjust impedance control parameters in response to environmental changes. In this framework, the UAV acts as a leader using Artificial Potential Field (APF) planning for real-time navigation, while the ground robot follows via virtual impedance links with adaptive link topology to avoid collisions with short obstacles. The system demonstrated a 92% success rate across 12 real-world trials. Under optimal lighting conditions, the VLM-RAG framework achieved 8% accuracy in object detection and selection of impedance parameters. The mobile robot prioritized short obstacle avoidance, occasionally resulting in a lateral deviation of up to 50 cm from the UAV path, which showcases safe navigation in a cluttered setting.
NMPC-Lander: Nonlinear MPC with Barrier Function for UAV Landing on a Mobile Platform
May 06, 2025Quadcopters are versatile aerial robots gaining popularity in numerous critical applications. However, their operational effectiveness is constrained by limited battery life and restricted flight range. To address these challenges, autonomous drone landing on stationary or mobile charging and battery-swapping stations has become an essential capability. In this study, we present NMPC-Lander, a novel control architecture that integrates Nonlinear Model Predictive Control (NMPC) with Control Barrier Functions (CBF) to achieve precise and safe autonomous landing on both static and dynamic platforms. Our approach employs NMPC for accurate trajectory tracking and landing, while simultaneously incorporating CBF to ensure collision avoidance with static obstacles. Experimental evaluations on the real hardware demonstrate high precision in landing scenarios, with an average final position error of 9.0 cm and 11 cm for stationary and mobile platforms, respectively. Notably, NMPC-Lander outperforms the B-spline combined with the A* planning method by nearly threefold in terms of position tracking, underscoring its superior robustness and practical effectiveness.
AttentionSwarm: Reinforcement Learning with Attention Control Barier Function for Crazyflie Drones in Dynamic Environments
Mar 10, 2025We introduce AttentionSwarm, a novel benchmark designed to evaluate safe and efficient swarm control across three challenging environments: a landing environment with obstacles, a competitive drone game setting, and a dynamic drone racing scenario. Central to our approach is the Attention Model Based Control Barrier Function (CBF) framework, which integrates attention mechanisms with safety-critical control theory to enable real-time collision avoidance and trajectory optimization. This framework dynamically prioritizes critical obstacles and agents in the swarms vicinity using attention weights, while CBFs formally guarantee safety by enforcing collision-free constraints. The safe attention net algorithm was developed and evaluated using a swarm of Crazyflie 2.1 micro quadrotors, which were tested indoors with the Vicon motion capture system to ensure precise localization and control. Experimental results show that our system achieves landing accuracy of 3.02 cm with a mean time of 23 s and collision-free landings in a dynamic landing environment, 100% and collision-free navigation in a drone game environment, and 95% and collision-free navigation for a dynamic multiagent drone racing environment, underscoring its effectiveness and robustness in real-world scenarios. This work offers a promising foundation for applications in dynamic environments where safety and fastness are paramount.
HIPPO-MAT: Decentralized Task Allocation Using GraphSAGE and Multi-Agent Deep Reinforcement Learning
Mar 08, 2025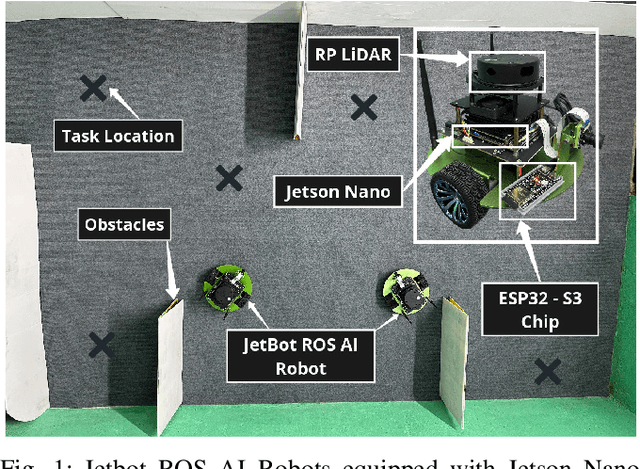
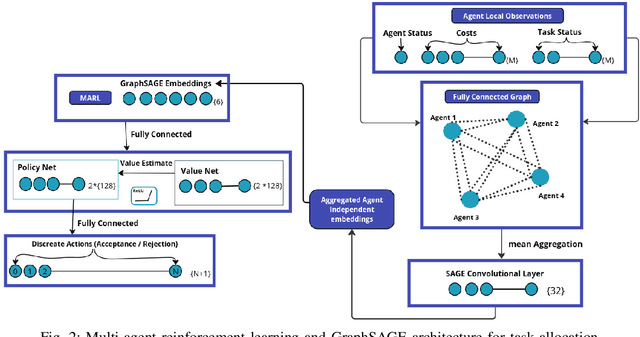


This paper tackles decentralized continuous task allocation in heterogeneous multi-agent systems. We present a novel framework HIPPO-MAT that integrates graph neural networks (GNN) employing a GraphSAGE architecture to compute independent embeddings on each agent with an Independent Proximal Policy Optimization (IPPO) approach for multi-agent deep reinforcement learning. In our system, unmanned aerial vehicles (UAVs) and unmanned ground vehicles (UGVs) share aggregated observation data via communication channels while independently processing these inputs to generate enriched state embeddings. This design enables dynamic, cost-optimal, conflict-aware task allocation in a 3D grid environment without the need for centralized coordination. A modified A* path planner is incorporated for efficient routing and collision avoidance. Simulation experiments demonstrate scalability with up to 30 agents and preliminary real-world validation on JetBot ROS AI Robots, each running its model on a Jetson Nano and communicating through an ESP-NOW protocol using ESP32-S3, which confirms the practical viability of the approach that incorporates simultaneous localization and mapping (SLAM). Experimental results revealed that our method achieves a high 92.5% conflict-free success rate, with only a 16.49% performance gap compared to the centralized Hungarian method, while outperforming the heuristic decentralized baseline based on greedy approach. Additionally, the framework exhibits scalability with up to 30 agents with allocation processing of 0.32 simulation step time and robustness in responding to dynamically generated tasks.
ImpedanceGPT: VLM-driven Impedance Control of Swarm of Mini-drones for Intelligent Navigation in Dynamic Environment
Mar 04, 2025Swarm robotics plays a crucial role in enabling autonomous operations in dynamic and unpredictable environments. However, a major challenge remains ensuring safe and efficient navigation in environments filled with both dynamic alive (e.g., humans) and dynamic inanimate (e.g., non-living objects) obstacles. In this paper, we propose ImpedanceGPT, a novel system that combines a Vision-Language Model (VLM) with retrieval-augmented generation (RAG) to enable real-time reasoning for adaptive navigation of mini-drone swarms in complex environments. The key innovation of ImpedanceGPT lies in the integration of VLM and RAG, which provides the drones with enhanced semantic understanding of their surroundings. This enables the system to dynamically adjust impedance control parameters in response to obstacle types and environmental conditions. Our approach not only ensures safe and precise navigation but also improves coordination between drones in the swarm. Experimental evaluations demonstrate the effectiveness of the system. The VLM-RAG framework achieved an obstacle detection and retrieval accuracy of 80 % under optimal lighting. In static environments, drones navigated dynamic inanimate obstacles at 1.4 m/s but slowed to 0.7 m/s with increased separation around humans. In dynamic environments, speed adjusted to 1.0 m/s near hard obstacles, while reducing to 0.6 m/s with higher deflection to safely avoid moving humans.