 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHawkDrive: A Transformer-driven Visual Perception System for Autonomous Driving in Night Scene
Paper and Code


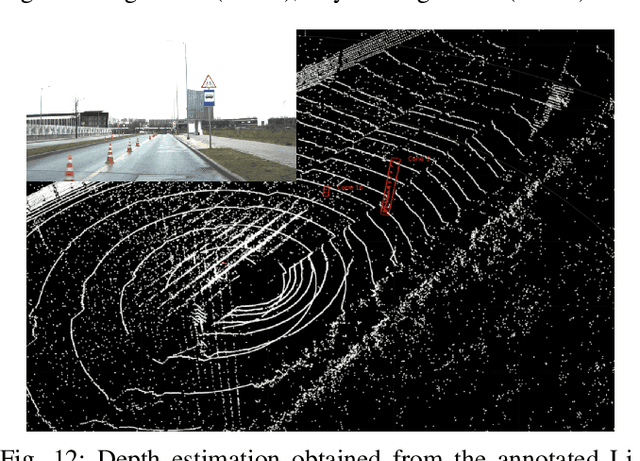

Many established vision perception systems for autonomous driving scenarios ignore the influence of light conditions, one of the key elements for driving safety. To address this problem, we present HawkDrive, a novel perception system with hardware and software solutions. Hardware that utilizes stereo vision perception, which has been demonstrated to be a more reliable way of estimating depth information than monocular vision, is partnered with the edge computing device Nvidia Jetson Xavier AGX. Our software for low light enhancement, depth estimation, and semantic segmentation tasks, is a transformer-based neural network. Our software stack, which enables fast inference and noise reduction, is packaged into system modules in Robot Operating System 2 (ROS2). Our experimental results have shown that the proposed end-to-end system is effective in improving the depth estimation and semantic segmentation performance. Our dataset and codes will be released at https://github.com/ZionGo6/HawkDrive.