 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Annotation-Free Validation of MLLMs: A Vision-Language Logical Consistency Metric
May 07, 2026Dominant accuracy evaluation might reward unwarranted guessing of Large Language Models, and it might not be applicable to novel tasks for model validation without ground-truth (gt) annotation. Based on basic logic principle, we propose a novel framework to evaluate the vision-language logical consistency of MLLMs on both sufficient and necessary cause-effect relations. We define Vision-Language Logical Consistency Metric (VL-LCM) on traditional MC-VQA tests, and recent NaturalBench tests without the need for gt annotation. Through systematic experiments on representative VL benchmark MMMU and recent VL challenges like NaturalBench, we evaluated 11 recent open-source MLLMs from 4 frontier families. Our findings reveal that, despite significant progress of recent MLLMs on accuracy, logical consistency lags behind significantly. Extensive evaluations on the correlations of VL-LCM with metrics on gt, the reliability of LCM, and the relation of VL-LCM with response distribution justify the validity and applicability of VL-LCM even without gt annotation. Our findings suggest that, beyond accuracy, logical consistency could be employed for both accuracy and reliability. VL-LCM can also be employed for MLLM selection, validation, and reliable answer justification in novel tasks without gt annotation.
Explicit Logic Channel for Validation and Enhancement of MLLMs on Zero-Shot Tasks
Mar 12, 2026Frontier Multimodal Large Language Models (MLLMs) exhibit remarkable capabilities in Visual-Language Comprehension (VLC) tasks. However, they are often deployed as zero-shot solution to new tasks in a black-box manner. Validating and understanding the behavior of these models become important for application to new task. We propose an Explicit Logic Channel, in parallel with the black-box model channel, to perform explicit logical reasoning for model validation, selection and enhancement. The frontier MLLM, encapsulating latent vision-language knowledge, can be considered as an Implicit Logic Channel. The proposed Explicit Logic Channel, mimicking human logical reasoning, incorporates a LLM, a VFM, and logical reasoning with probabilistic inference for factual, counterfactual, and relational reasoning over the explicit visual evidence. A Consistency Rate (CR) is proposed for cross-channel validation and model selection, even without ground-truth annotations. Additionally, cross-channel integration further improves performance in zero-shot tasks over MLLMs, grounded with explicit visual evidence to enhance trustworthiness. Comprehensive experiments conducted for two representative VLC tasks, i.e., MC-VQA and HC-REC, on three challenging benchmarks, with 11 recent open-source MLLMs from 4 frontier families. Our systematic evaluations demonstrate the effectiveness of proposed ELC and CR for model validation, selection and improvement on MLLMs with enhanced explainability and trustworthiness.
Combined CNN Transformer Encoder for Enhanced Fine-grained Human Action Recognition
Aug 03, 2022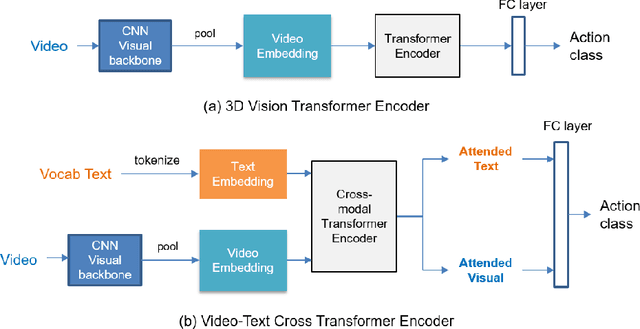
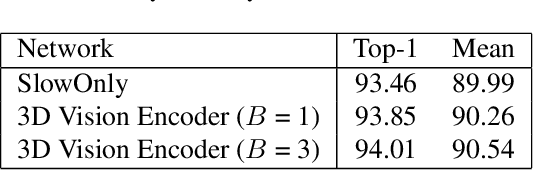
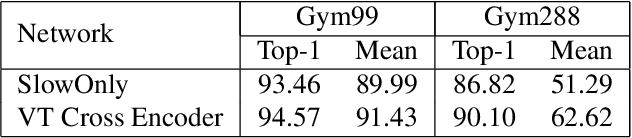
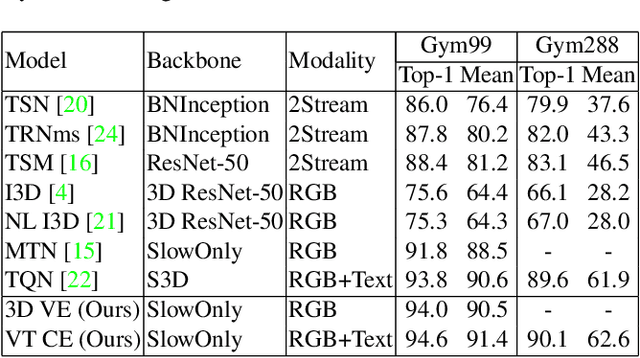
Fine-grained action recognition is a challenging task in computer vision. As fine-grained datasets have small inter-class variations in spatial and temporal space, fine-grained action recognition model requires good temporal reasoning and discrimination of attribute action semantics. Leveraging on CNN's ability in capturing high level spatial-temporal feature representations and Transformer's modeling efficiency in capturing latent semantics and global dependencies, we investigate two frameworks that combine CNN vision backbone and Transformer Encoder to enhance fine-grained action recognition: 1) a vision-based encoder to learn latent temporal semantics, and 2) a multi-modal video-text cross encoder to exploit additional text input and learn cross association between visual and text semantics. Our experimental results show that both our Transformer encoder frameworks effectively learn latent temporal semantics and cross-modality association, with improved recognition performance over CNN vision model. We achieve new state-of-the-art performance on the FineGym benchmark dataset for both proposed architectures.
A Multi-task Framework for Infrared Small Target Detection and Segmentation
Jun 14, 2022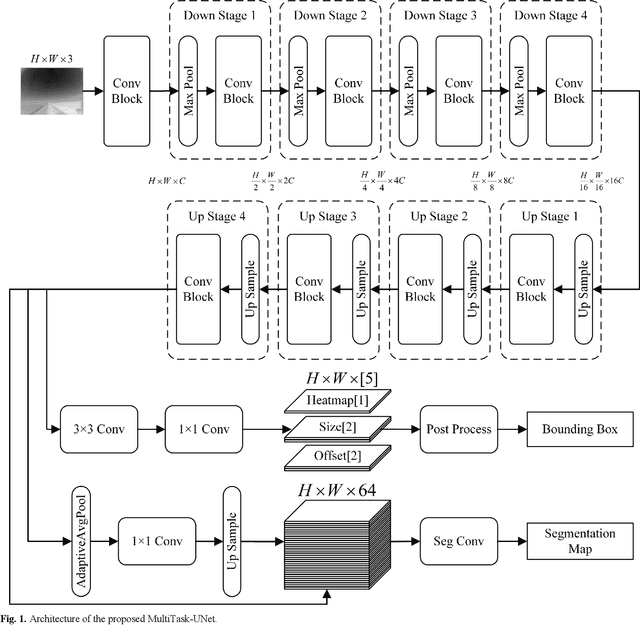
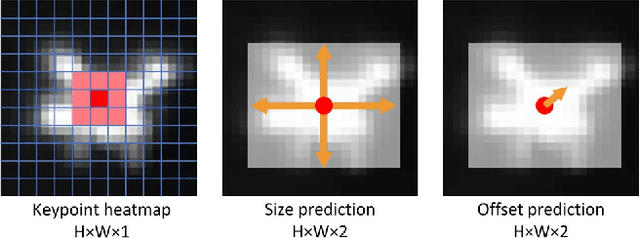

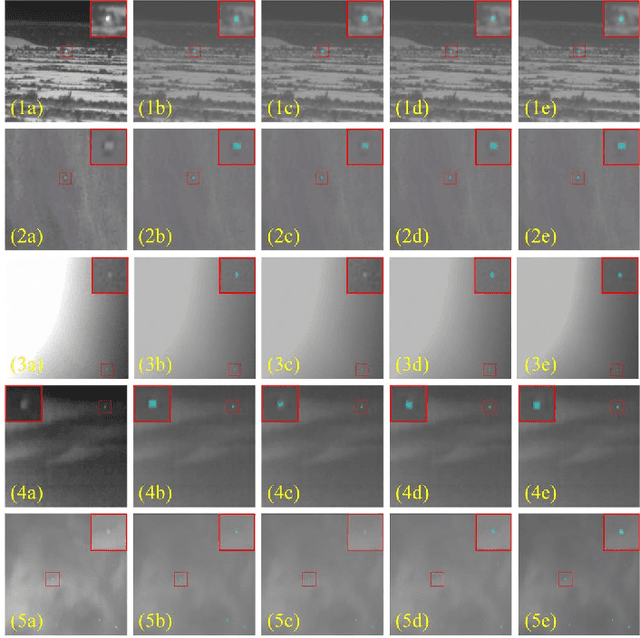
Due to the complicated background and noise of infrared images, infrared small target detection is one of the most difficult problems in the field of computer vision. In most existing studies, semantic segmentation methods are typically used to achieve better results. The centroid of each target is calculated from the segmentation map as the detection result. In contrast, we propose a novel end-to-end framework for infrared small target detection and segmentation in this paper. First, with the use of UNet as the backbone to maintain resolution and semantic information, our model can achieve a higher detection accuracy than other state-of-the-art methods by attaching a simple anchor-free head. Then, a pyramid pool module is used to further extract features and improve the precision of target segmentation. Next, we use semantic segmentation tasks that pay more attention to pixel-level features to assist in the training process of object detection, which increases the average precision and allows the model to detect some targets that were previously not detectable. Furthermore, we develop a multi-task framework for infrared small target detection and segmentation. Our multi-task learning model reduces complexity by nearly half and speeds up inference by nearly twice compared to the composite single-task model, while maintaining accuracy. The code and models are publicly available at https://github.com/Chenastron/MTUNet.
TAILOR: Teaching with Active and Incremental Learning for Object Registration
May 24, 2022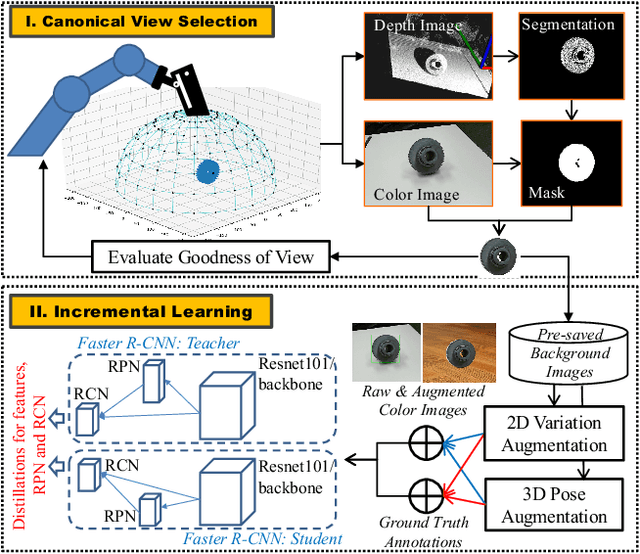
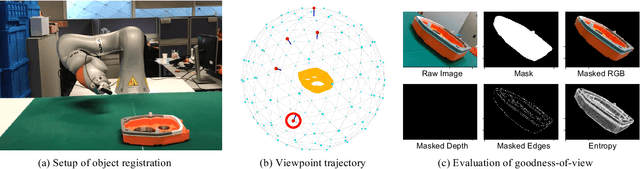
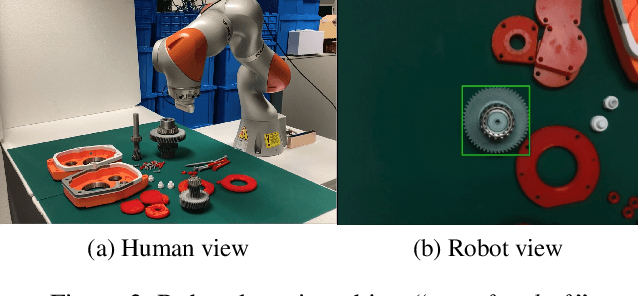
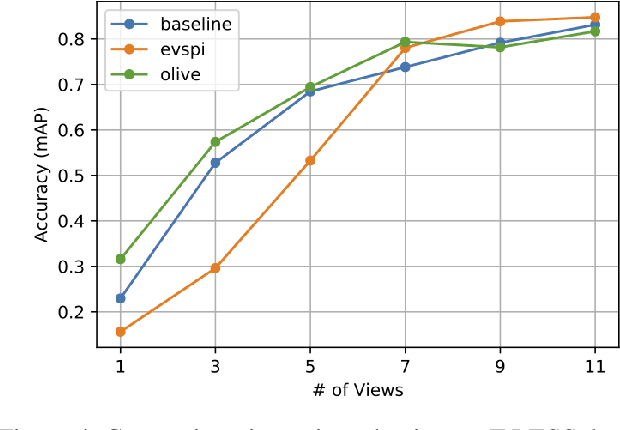
When deploying a robot to a new task, one often has to train it to detect novel objects, which is time-consuming and labor-intensive. We present TAILOR -- a method and system for object registration with active and incremental learning. When instructed by a human teacher to register an object, TAILOR is able to automatically select viewpoints to capture informative images by actively exploring viewpoints, and employs a fast incremental learning algorithm to learn new objects without potential forgetting of previously learned objects. We demonstrate the effectiveness of our method with a KUKA robot to learn novel objects used in a real-world gearbox assembly task through natural interactions.
Joint Learning On The Hierarchy Representation for Fine-Grained Human Action Recognition
Oct 12, 2021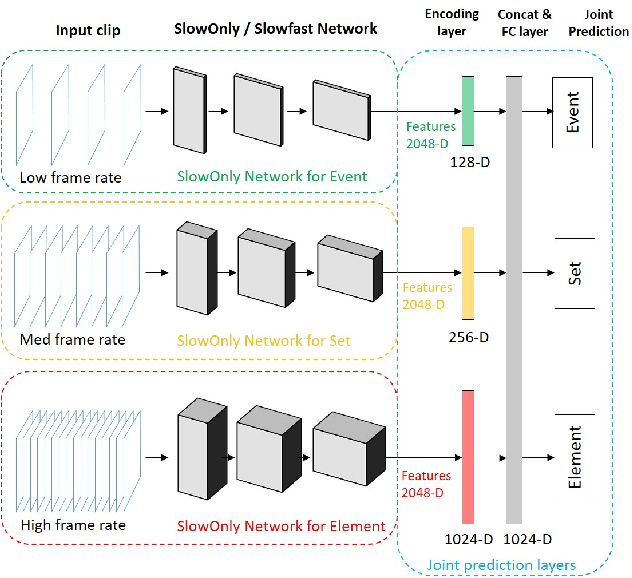
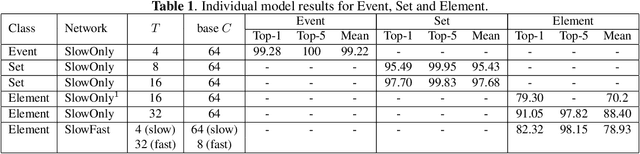

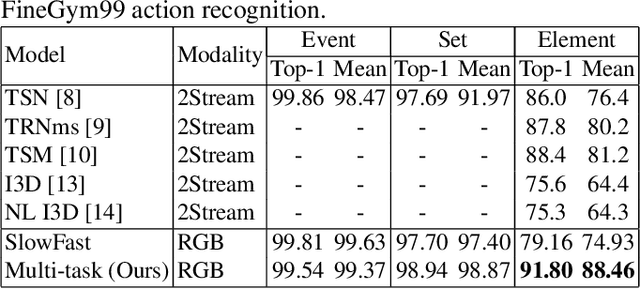
Fine-grained human action recognition is a core research topic in computer vision. Inspired by the recently proposed hierarchy representation of fine-grained actions in FineGym and SlowFast network for action recognition, we propose a novel multi-task network which exploits the FineGym hierarchy representation to achieve effective joint learning and prediction for fine-grained human action recognition. The multi-task network consists of three pathways of SlowOnly networks with gradually increased frame rates for events, sets and elements of fine-grained actions, followed by our proposed integration layers for joint learning and prediction. It is a two-stage approach, where it first learns deep feature representation at each hierarchical level, and is followed by feature encoding and fusion for multi-task learning. Our empirical results on the FineGym dataset achieve a new state-of-the-art performance, with 91.80% Top-1 accuracy and 88.46% mean accuracy for element actions, which are 3.40% and 7.26% higher than the previous best results.
* Camera ready for IEEE ICIP 2021
6D Pose Estimation with Correlation Fusion
Sep 24, 2019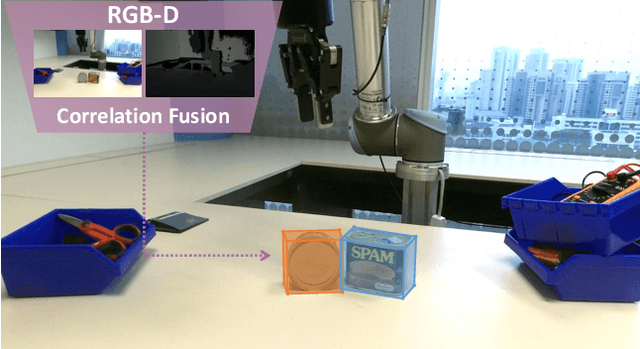
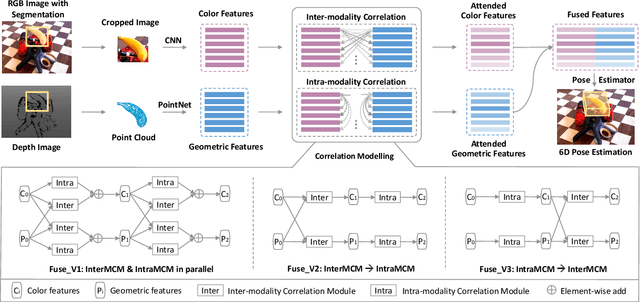
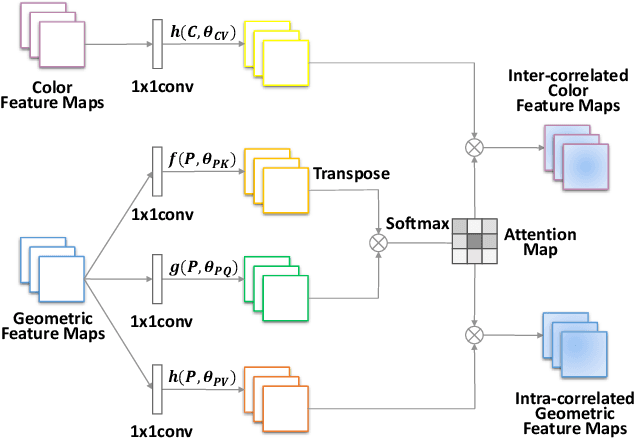
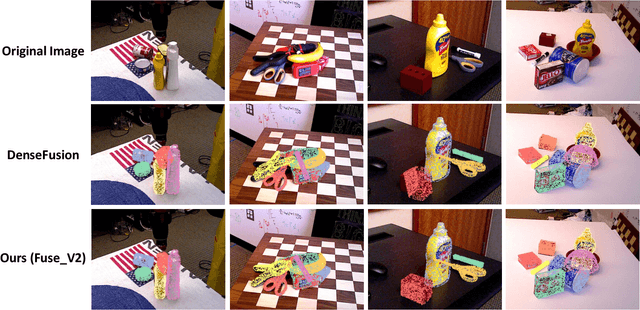
6D object pose estimation is widely applied in robotic tasks such as grasping and manipulation. Prior methods using RGB-only images are vulnerable to heavy occlusion and poor illumination, so it is important to complement them with depth information. However, existing methods using RGB-D data don't adequately exploit consistent and complementary information between two modalities. In this paper, we present a novel method to effectively consider the correlation within and across RGB and depth modalities with attention mechanism to learn discriminative multi-modal features. Then, effective fusion strategies for intra- and inter-correlation modules are explored to ensure efficient information flow between RGB and depth. To the best of our knowledge, this is the first work to explore effective intra- and inter-modality fusion in 6D pose estimation and experimental results show that our method can help achieve the state-of-the-art performance on LineMOD and YCB-Video datasets as well as benefit robot grasping task.