Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTAILOR: Teaching with Active and Incremental Learning for Object Registration
May 24, 2022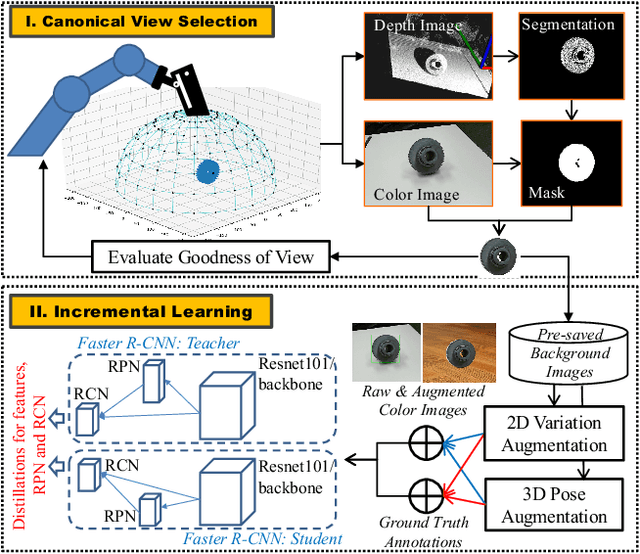
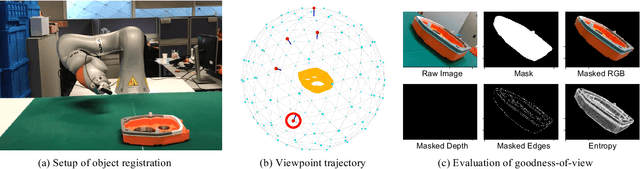
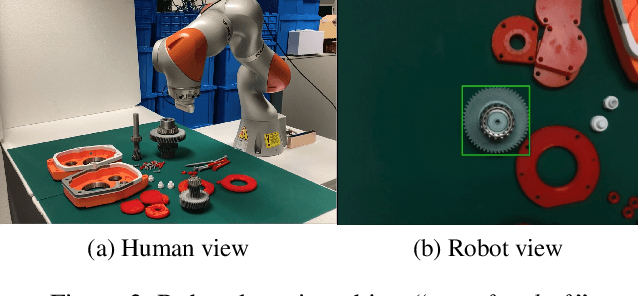
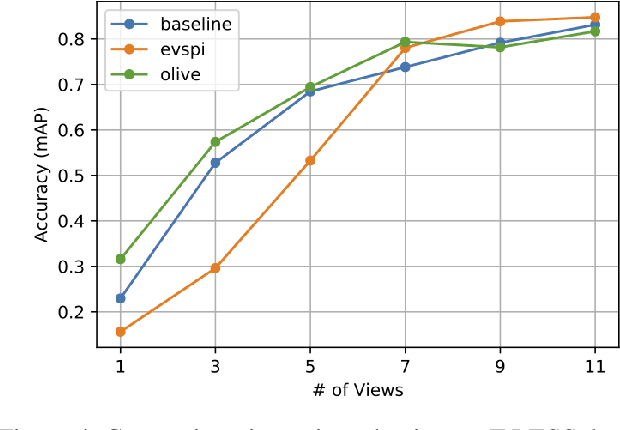
When deploying a robot to a new task, one often has to train it to detect novel objects, which is time-consuming and labor-intensive. We present TAILOR -- a method and system for object registration with active and incremental learning. When instructed by a human teacher to register an object, TAILOR is able to automatically select viewpoints to capture informative images by actively exploring viewpoints, and employs a fast incremental learning algorithm to learn new objects without potential forgetting of previously learned objects. We demonstrate the effectiveness of our method with a KUKA robot to learn novel objects used in a real-world gearbox assembly task through natural interactions.
* 5 pages, 4 figures, AAAI conference
Via