 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRE-MCDF: Closed-Loop Multi-Expert LLM Reasoning for Knowledge-Grounded Clinical Diagnosis
Feb 01, 2026Electronic medical records (EMRs), particularly in neurology, are inherently heterogeneous, sparse, and noisy, which poses significant challenges for large language models (LLMs) in clinical diagnosis. In such settings, single-agent systems are vulnerable to self-reinforcing errors, as their predictions lack independent validation and can drift toward spurious conclusions. Although recent multi-agent frameworks attempt to mitigate this issue through collaborative reasoning, their interactions are often shallow and loosely structured, failing to reflect the rigorous, evidence-driven processes used by clinical experts. More fundamentally, existing approaches largely ignore the rich logical dependencies among diseases, such as mutual exclusivity, pathological compatibility, and diagnostic confusion. This limitation prevents them from ruling out clinically implausible hypotheses, even when sufficient evidence is available. To overcome these, we propose RE-MCDF, a relation-enhanced multi-expert clinical diagnosis framework. RE-MCDF introduces a generation--verification--revision closed-loop architecture that integrates three complementary components: (i) a primary expert that generates candidate diagnoses and supporting evidence, (ii) a laboratory expert that dynamically prioritizes heterogeneous clinical indicators, and (iii) a multi-relation awareness and evaluation expert group that explicitly enforces inter-disease logical constraints. Guided by a medical knowledge graph (MKG), the first two experts adaptively reweight EMR evidence, while the expert group validates and corrects candidate diagnoses to ensure logical consistency. Extensive experiments on the neurology subset of CMEMR (NEEMRs) and on our curated dataset (XMEMRs) demonstrate that RE-MCDF consistently outperforms state-of-the-art baselines in complex diagnostic scenarios.
Generative AI for Lyapunov Optimization Theory in UAV-based Low-Altitude Economy Networking
Jan 27, 2025



Lyapunov optimization theory has recently emerged as a powerful mathematical framework for solving complex stochastic optimization problems by transforming long-term objectives into a sequence of real-time short-term decisions while ensuring system stability. This theory is particularly valuable in unmanned aerial vehicle (UAV)-based low-altitude economy (LAE) networking scenarios, where it could effectively address inherent challenges of dynamic network conditions, multiple optimization objectives, and stability requirements. Recently, generative artificial intelligence (GenAI) has garnered significant attention for its unprecedented capability to generate diverse digital content. Extending beyond content generation, in this paper, we propose a framework integrating generative diffusion models with reinforcement learning to address Lyapunov optimization problems in UAV-based LAE networking. We begin by introducing the fundamentals of Lyapunov optimization theory and analyzing the limitations of both conventional methods and traditional AI-enabled approaches. We then examine various GenAI models and comprehensively analyze their potential contributions to Lyapunov optimization. Subsequently, we develop a Lyapunov-guided generative diffusion model-based reinforcement learning framework and validate its effectiveness through a UAV-based LAE networking case study. Finally, we outline several directions for future research.
Joint Model Caching and Resource Allocation in Generative AI-Enabled Wireless Edge Networks
Nov 13, 2024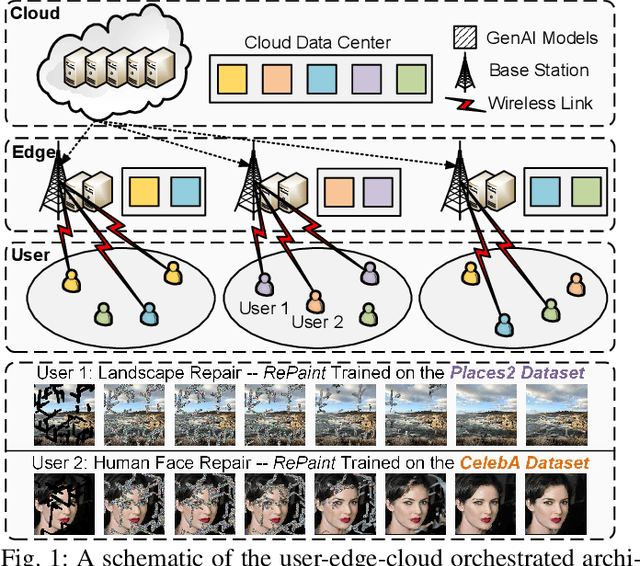
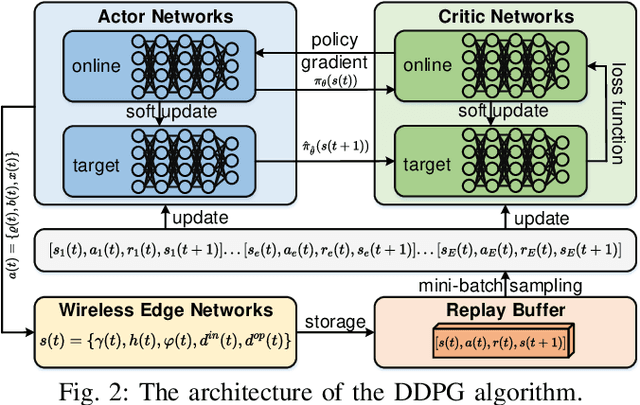
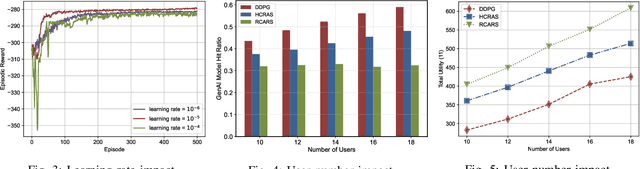
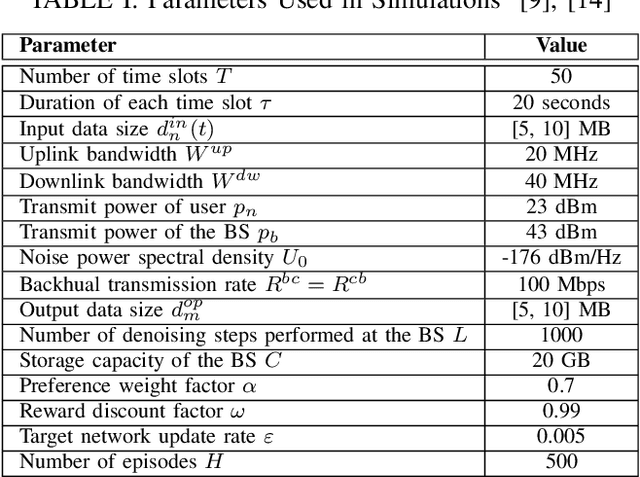
With the rapid advancement of artificial intelligence (AI), generative AI (GenAI) has emerged as a transformative tool, enabling customized and personalized AI-generated content (AIGC) services. However, GenAI models with billions of parameters require substantial memory capacity and computational power for deployment and execution, presenting significant challenges to resource-limited edge networks. In this paper, we address the joint model caching and resource allocation problem in GenAI-enabled wireless edge networks. Our objective is to balance the trade-off between delivering high-quality AIGC and minimizing the delay in AIGC service provisioning. To tackle this problem, we employ a deep deterministic policy gradient (DDPG)-based reinforcement learning approach, capable of efficiently determining optimal model caching and resource allocation decisions for AIGC services in response to user mobility and time-varying channel conditions. Numerical results demonstrate that DDPG achieves a higher model hit ratio and provides superior-quality, lower-latency AIGC services compared to other benchmark solutions.
Two-Timescale Model Caching and Resource Allocation for Edge-Enabled AI-Generated Content Services
Nov 03, 2024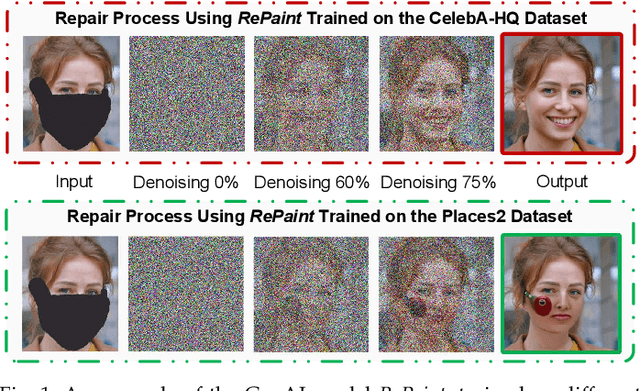

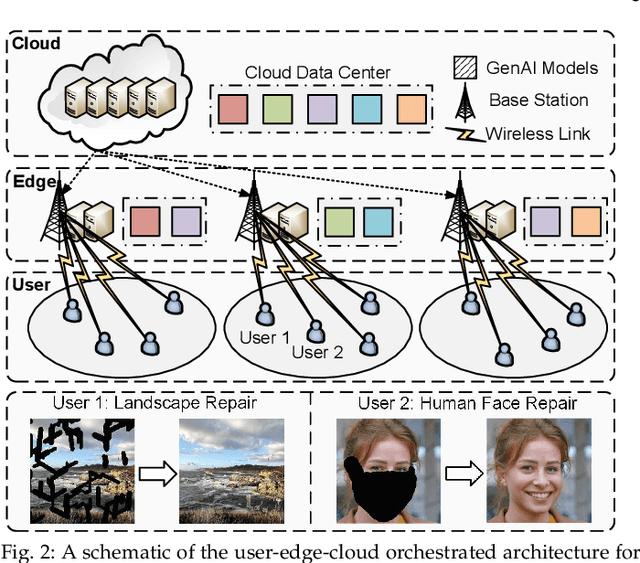
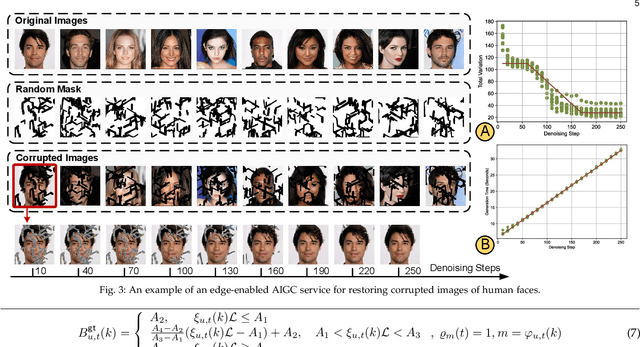
Generative AI (GenAI) has emerged as a transformative technology, enabling customized and personalized AI-generated content (AIGC) services. In this paper, we address challenges of edge-enabled AIGC service provisioning, which remain underexplored in the literature. These services require executing GenAI models with billions of parameters, posing significant obstacles to resource-limited wireless edge. We subsequently introduce the formulation of joint model caching and resource allocation for AIGC services to balance a trade-off between AIGC quality and latency metrics. We obtain mathematical relationships of these metrics with the computational resources required by GenAI models via experimentation. Afterward, we decompose the formulation into a model caching subproblem on a long-timescale and a resource allocation subproblem on a short-timescale. Since the variables to be solved are discrete and continuous, respectively, we leverage a double deep Q-network (DDQN) algorithm to solve the former subproblem and propose a diffusion-based deep deterministic policy gradient (D3PG) algorithm to solve the latter. The proposed D3PG algorithm makes an innovative use of diffusion models as the actor network to determine optimal resource allocation decisions. Consequently, we integrate these two learning methods within the overarching two-timescale deep reinforcement learning (T2DRL) algorithm, the performance of which is studied through comparative numerical simulations.
DNN Partitioning, Task Offloading, and Resource Allocation in Dynamic Vehicular Networks: A Lyapunov-Guided Diffusion-Based Reinforcement Learning Approach
Jun 11, 2024



The rapid advancement of Artificial Intelligence (AI) has introduced Deep Neural Network (DNN)-based tasks to the ecosystem of vehicular networks. These tasks are often computation-intensive, requiring substantial computation resources, which are beyond the capability of a single vehicle. To address this challenge, Vehicular Edge Computing (VEC) has emerged as a solution, offering computing services for DNN-based tasks through resource pooling via Vehicle-to-Vehicle/Infrastructure (V2V/V2I) communications. In this paper, we formulate the problem of joint DNN partitioning, task offloading, and resource allocation in VEC as a dynamic long-term optimization. Our objective is to minimize the DNN-based task completion time while guaranteeing the system stability over time. To this end, we first leverage a Lyapunov optimization technique to decouple the original long-term optimization with stability constraints into a per-slot deterministic problem. Afterwards, we propose a Multi-Agent Diffusion-based Deep Reinforcement Learning (MAD2RL) algorithm, incorporating the innovative use of diffusion models to determine the optimal DNN partitioning and task offloading decisions. Furthermore, we integrate convex optimization techniques into MAD2RL as a subroutine to allocate computation resources, enhancing the learning efficiency. Through simulations under real-world movement traces of vehicles, we demonstrate the superior performance of our proposed algorithm compared to existing benchmark solutions.
Towards Integrated Fine-tuning and Inference when Generative AI meets Edge Intelligence
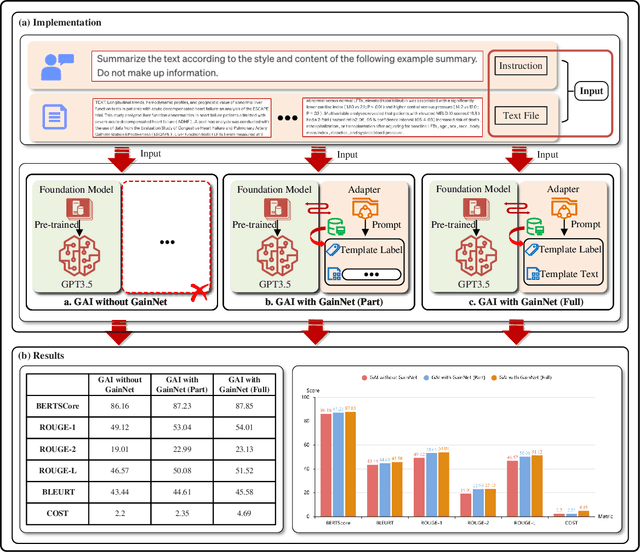
Jan 05, 2024The high-performance generative artificial intelligence (GAI) represents the latest evolution of computational intelligence, while the blessing of future 6G networks also makes edge intelligence (EI) full of development potential. The inevitable encounter between GAI and EI can unleash new opportunities, where GAI's pre-training based on massive computing resources and large-scale unlabeled corpora can provide strong foundational knowledge for EI, while EI can harness fragmented computing resources to aggregate personalized knowledge for GAI. However, the natural contradictory features pose significant challenges to direct knowledge sharing. To address this, in this paper, we propose the GAI-oriented synthetical network (GaisNet), a collaborative cloud-edge-end intelligence framework that buffers contradiction leveraging data-free knowledge relay, where the bidirectional knowledge flow enables GAI's virtuous-cycle model fine-tuning and task inference, achieving mutualism between GAI and EI with seamless fusion and collaborative evolution. Experimental results demonstrate the effectiveness of the proposed mechanisms. Finally, we discuss the future challenges and directions in the interplay between GAI and EI.
GainNet: Coordinates the Odd Couple of Generative AI and 6G Networks
Jan 05, 2024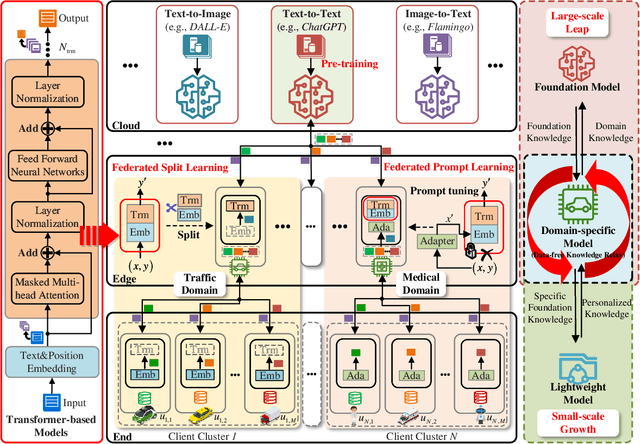
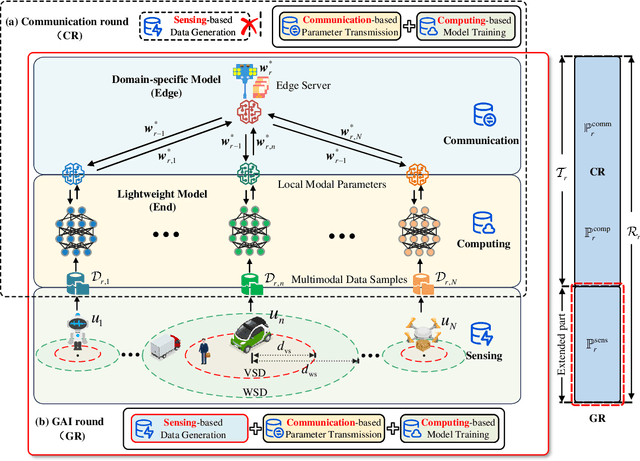
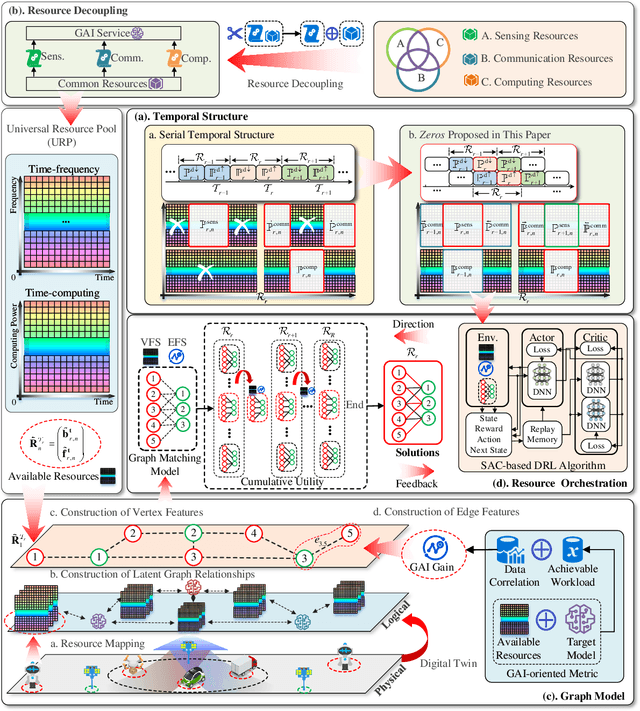
The rapid expansion of AI-generated content (AIGC) reflects the iteration from assistive AI towards generative AI (GAI) with creativity. Meanwhile, the 6G networks will also evolve from the Internet-of-everything to the Internet-of-intelligence with hybrid heterogeneous network architectures. In the future, the interplay between GAI and the 6G will lead to new opportunities, where GAI can learn the knowledge of personalized data from the massive connected 6G end devices, while GAI's powerful generation ability can provide advanced network solutions for 6G network and provide 6G end devices with various AIGC services. However, they seem to be an odd couple, due to the contradiction of data and resources. To achieve a better-coordinated interplay between GAI and 6G, the GAI-native networks (GainNet), a GAI-oriented collaborative cloud-edge-end intelligence framework, is proposed in this paper. By deeply integrating GAI with 6G network design, GainNet realizes the positive closed-loop knowledge flow and sustainable-evolution GAI model optimization. On this basis, the GAI-oriented generic resource orchestration mechanism with integrated sensing, communication, and computing (GaiRom-ISCC) is proposed to guarantee the efficient operation of GainNet. Two simple case studies demonstrate the effectiveness and robustness of the proposed schemes. Finally, we envision the key challenges and future directions concerning the interplay between GAI models and 6G networks.
Integrated Sensing, Communication, and Computing for Cost-effective Multimodal Federated Perception
Nov 07, 2023Federated learning (FL) is a classic paradigm of 6G edge intelligence (EI), which alleviates privacy leaks and high communication pressure caused by traditional centralized data processing in the artificial intelligence of things (AIoT). The implementation of multimodal federated perception (MFP) services involves three sub-processes, including sensing-based multimodal data generation, communication-based model transmission, and computing-based model training, ultimately relying on available underlying multi-domain physical resources such as time, frequency, and computing power. How to reasonably coordinate the multi-domain resources scheduling among sensing, communication, and computing, therefore, is crucial to the MFP networks. To address the above issues, this paper investigates service-oriented resource management with integrated sensing, communication, and computing (ISCC). With the incentive mechanism of the MFP service market, the resources management problem is redefined as a social welfare maximization problem, where the idea of "expanding resources" and "reducing costs" is used to improve learning performance gain and reduce resource costs. Experimental results demonstrate the effectiveness and robustness of the proposed resource scheduling mechanisms.
GA-DRL: Graph Neural Network-Augmented Deep Reinforcement Learning for DAG Task Scheduling over Dynamic Vehicular Clouds
Jul 03, 2023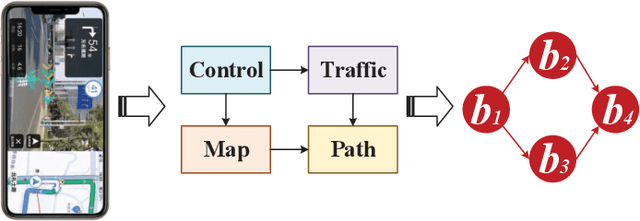
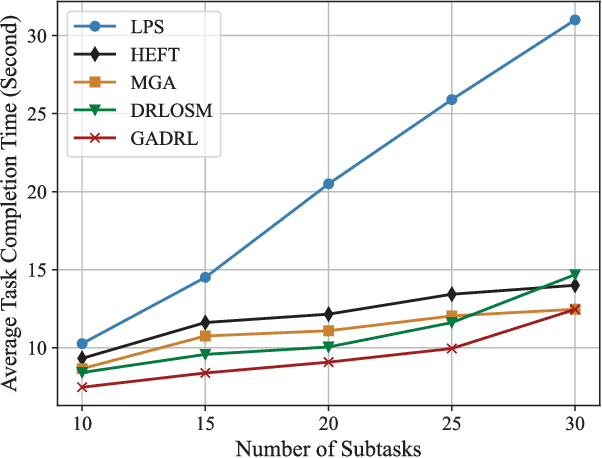
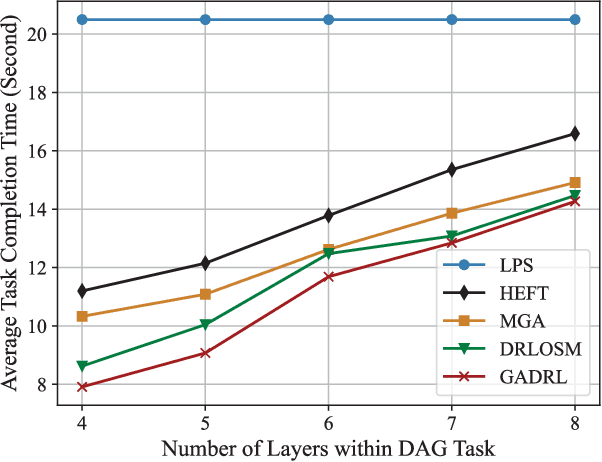
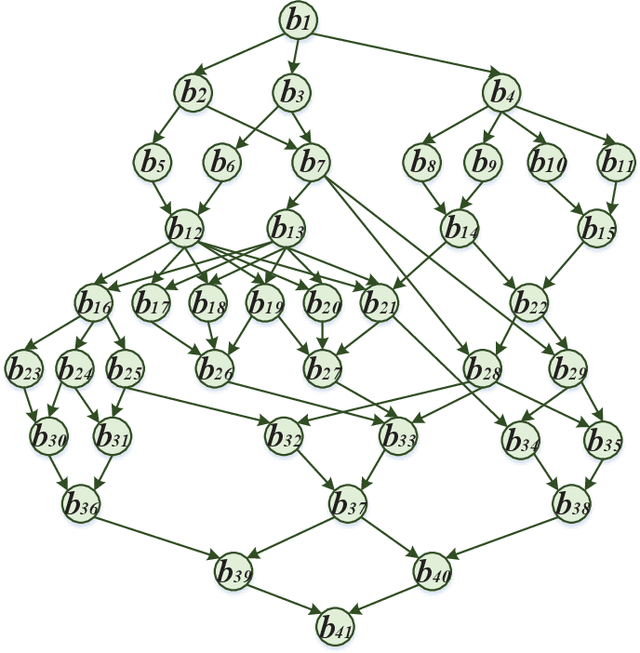
Vehicular clouds (VCs) are modern platforms for processing of computation-intensive tasks over vehicles. Such tasks are often represented as directed acyclic graphs (DAGs) consisting of interdependent vertices/subtasks and directed edges. In this paper, we propose a graph neural network-augmented deep reinforcement learning scheme (GA-DRL) for scheduling DAG tasks over dynamic VCs. In doing so, we first model the VC-assisted DAG task scheduling as a Markov decision process. We then adopt a multi-head graph attention network (GAT) to extract the features of DAG subtasks. Our developed GAT enables a two-way aggregation of the topological information in a DAG task by simultaneously considering predecessors and successors of each subtask. We further introduce non-uniform DAG neighborhood sampling through codifying the scheduling priority of different subtasks, which makes our developed GAT generalizable to completely unseen DAG task topologies. Finally, we augment GAT into a double deep Q-network learning module to conduct subtask-to-vehicle assignment according to the extracted features of subtasks, while considering the dynamics and heterogeneity of the vehicles in VCs. Through simulating various DAG tasks under real-world movement traces of vehicles, we demonstrate that GA-DRL outperforms existing benchmarks in terms of DAG task completion time.