 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStep-Audio 2 Technical Report
Jul 24, 2025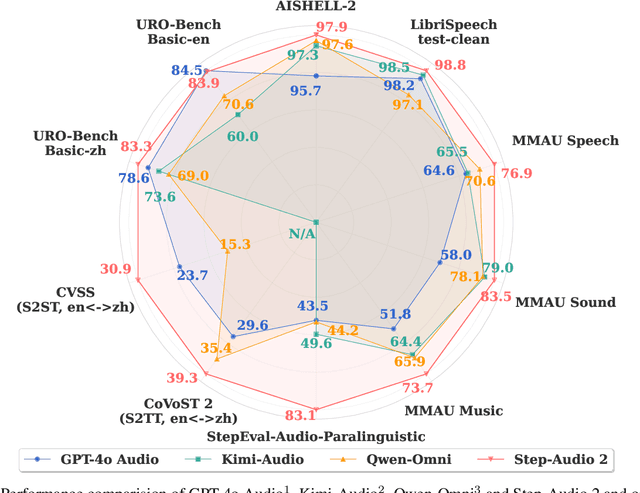

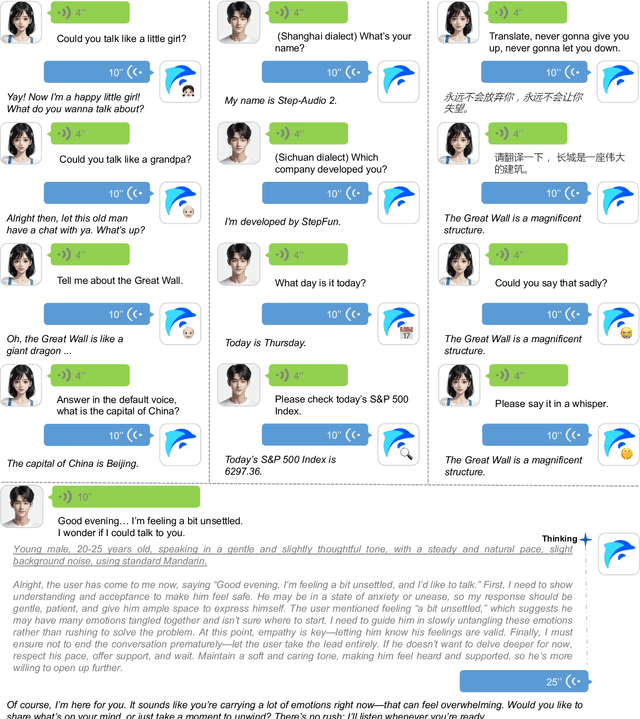

This paper presents Step-Audio 2, an end-to-end multi-modal large language model designed for industry-strength audio understanding and speech conversation. By integrating a latent audio encoder and reasoning-centric reinforcement learning (RL), Step-Audio 2 achieves promising performance in automatic speech recognition (ASR) and audio understanding. To facilitate genuine end-to-end speech conversation, Step-Audio 2 incorporates the generation of discrete audio tokens into language modeling, significantly enhancing its responsiveness to paralinguistic information such as speaking styles and emotions. To effectively leverage the rich textual and acoustic knowledge in real-world data, Step-Audio 2 integrates retrieval-augmented generation (RAG) and is able to call external tools such as web search to mitigate hallucination and audio search to switch timbres. Trained on millions of hours of speech and audio data, Step-Audio 2 delivers intelligence and expressiveness across diverse conversational scenarios. Evaluation results demonstrate that Step-Audio 2 achieves state-of-the-art performance on various audio understanding and conversational benchmarks compared to other open-source and commercial solutions. Please visit https://github.com/stepfun-ai/Step-Audio2 for more information.
Step-Audio-AQAA: a Fully End-to-End Expressive Large Audio Language Model
Jun 10, 2025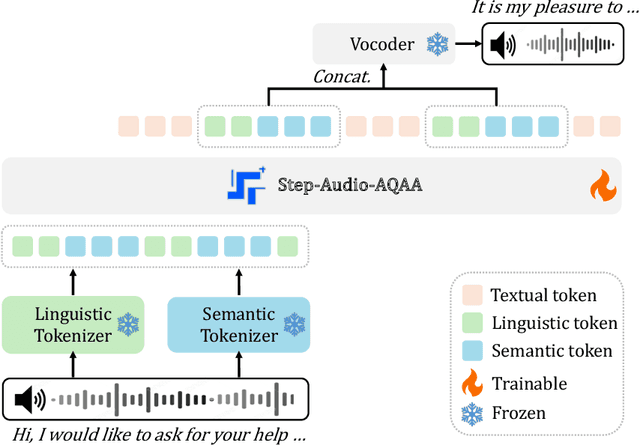
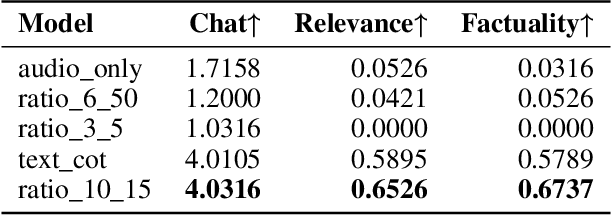
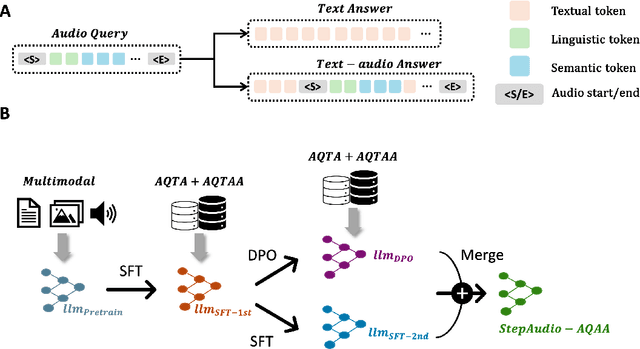

Large Audio-Language Models (LALMs) have significantly advanced intelligent human-computer interaction, yet their reliance on text-based outputs limits their ability to generate natural speech responses directly, hindering seamless audio interactions. To address this, we introduce Step-Audio-AQAA, a fully end-to-end LALM designed for Audio Query-Audio Answer (AQAA) tasks. The model integrates a dual-codebook audio tokenizer for linguistic and semantic feature extraction, a 130-billion-parameter backbone LLM and a neural vocoder for high-fidelity speech synthesis. Our post-training approach employs interleaved token-output of text and audio to enhance semantic coherence and combines Direct Preference Optimization (DPO) with model merge to improve performance. Evaluations on the StepEval-Audio-360 benchmark demonstrate that Step-Audio-AQAA excels especially in speech control, outperforming the state-of-art LALMs in key areas. This work contributes a promising solution for end-to-end LALMs and highlights the critical role of token-based vocoder in enhancing overall performance for AQAA tasks.
Step-Audio: Unified Understanding and Generation in Intelligent Speech Interaction
Feb 18, 2025Real-time speech interaction, serving as a fundamental interface for human-machine collaboration, holds immense potential. However, current open-source models face limitations such as high costs in voice data collection, weakness in dynamic control, and limited intelligence. To address these challenges, this paper introduces Step-Audio, the first production-ready open-source solution. Key contributions include: 1) a 130B-parameter unified speech-text multi-modal model that achieves unified understanding and generation, with the Step-Audio-Chat version open-sourced; 2) a generative speech data engine that establishes an affordable voice cloning framework and produces the open-sourced lightweight Step-Audio-TTS-3B model through distillation; 3) an instruction-driven fine control system enabling dynamic adjustments across dialects, emotions, singing, and RAP; 4) an enhanced cognitive architecture augmented with tool calling and role-playing abilities to manage complex tasks effectively. Based on our new StepEval-Audio-360 evaluation benchmark, Step-Audio achieves state-of-the-art performance in human evaluations, especially in terms of instruction following. On open-source benchmarks like LLaMA Question, shows 9.3% average performance improvement, demonstrating our commitment to advancing the development of open-source multi-modal language technologies. Our code and models are available at https://github.com/stepfun-ai/Step-Audio.
DNN Partitioning, Task Offloading, and Resource Allocation in Dynamic Vehicular Networks: A Lyapunov-Guided Diffusion-Based Reinforcement Learning Approach
Jun 11, 2024



The rapid advancement of Artificial Intelligence (AI) has introduced Deep Neural Network (DNN)-based tasks to the ecosystem of vehicular networks. These tasks are often computation-intensive, requiring substantial computation resources, which are beyond the capability of a single vehicle. To address this challenge, Vehicular Edge Computing (VEC) has emerged as a solution, offering computing services for DNN-based tasks through resource pooling via Vehicle-to-Vehicle/Infrastructure (V2V/V2I) communications. In this paper, we formulate the problem of joint DNN partitioning, task offloading, and resource allocation in VEC as a dynamic long-term optimization. Our objective is to minimize the DNN-based task completion time while guaranteeing the system stability over time. To this end, we first leverage a Lyapunov optimization technique to decouple the original long-term optimization with stability constraints into a per-slot deterministic problem. Afterwards, we propose a Multi-Agent Diffusion-based Deep Reinforcement Learning (MAD2RL) algorithm, incorporating the innovative use of diffusion models to determine the optimal DNN partitioning and task offloading decisions. Furthermore, we integrate convex optimization techniques into MAD2RL as a subroutine to allocate computation resources, enhancing the learning efficiency. Through simulations under real-world movement traces of vehicles, we demonstrate the superior performance of our proposed algorithm compared to existing benchmark solutions.