 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCapHDR2IR: Caption-Driven Transfer from Visible Light to Infrared Domain
Nov 25, 2024
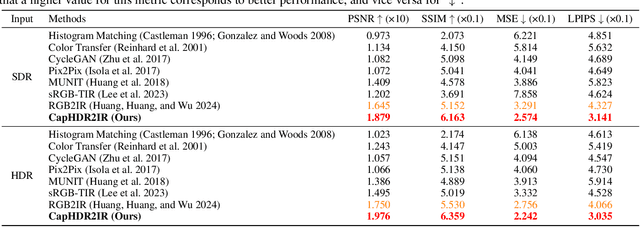

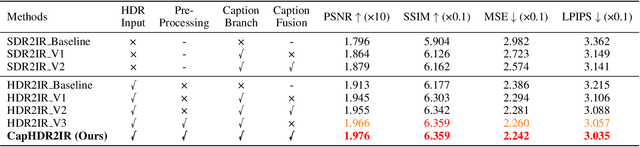
Infrared (IR) imaging offers advantages in several fields due to its unique ability of capturing content in extreme light conditions. However, the demanding hardware requirements of high-resolution IR sensors limit its widespread application. As an alternative, visible light can be used to synthesize IR images but this causes a loss of fidelity in image details and introduces inconsistencies due to lack of contextual awareness of the scene. This stems from a combination of using visible light with a standard dynamic range, especially under extreme lighting, and a lack of contextual awareness can result in pseudo-thermal-crossover artifacts. This occurs when multiple objects with similar temperatures appear indistinguishable in the training data, further exacerbating the loss of fidelity. To solve this challenge, this paper proposes CapHDR2IR, a novel framework incorporating vision-language models using high dynamic range (HDR) images as inputs to generate IR images. HDR images capture a wider range of luminance variations, ensuring reliable IR image generation in different light conditions. Additionally, a dense caption branch integrates semantic understanding, resulting in more meaningful and discernible IR outputs. Extensive experiments on the HDRT dataset show that the proposed CapHDR2IR achieves state-of-the-art performance compared with existing general domain transfer methods and those tailored for visible-to-infrared image translation.
Luminance Component Analysis for Exposure Correction
Nov 25, 2024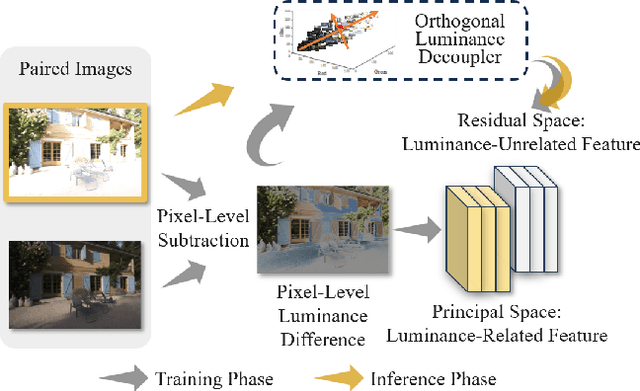

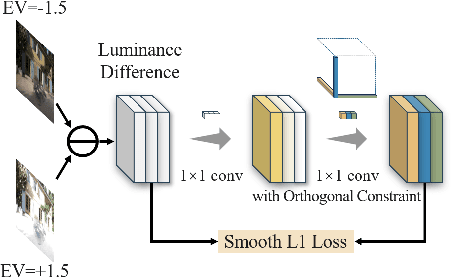

Exposure correction methods aim to adjust the luminance while maintaining other luminance-unrelated information. However, current exposure correction methods have difficulty in fully separating luminance-related and luminance-unrelated components, leading to distortions in color, loss of detail, and requiring extra restoration procedures. Inspired by principal component analysis (PCA), this paper proposes an exposure correction method called luminance component analysis (LCA). LCA applies the orthogonal constraint to a U-Net structure to decouple luminance-related and luminance-unrelated features. With decoupled luminance-related features, LCA adjusts only the luminance-related components while keeping the luminance-unrelated components unchanged. To optimize the orthogonal constraint problem, LCA employs a geometric optimization algorithm, which converts the constrained problem in Euclidean space to an unconstrained problem in orthogonal Stiefel manifolds. Extensive experiments show that LCA can decouple the luminance feature from the RGB color space. Moreover, LCA achieves the best PSNR (21.33) and SSIM (0.88) in the exposure correction dataset with 28.72 FPS.
Good Data Is All Imitation Learning Needs
Sep 26, 2024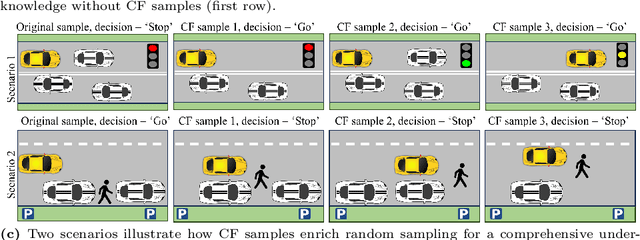
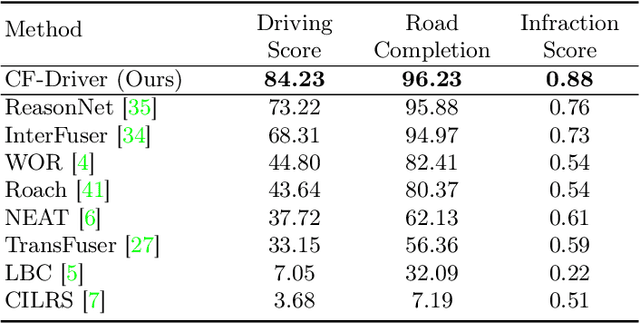
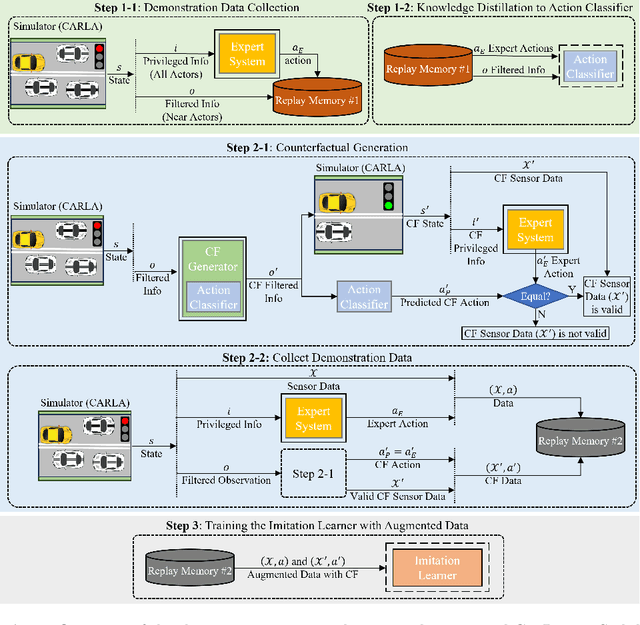

In this paper, we address the limitations of traditional teacher-student models, imitation learning, and behaviour cloning in the context of Autonomous/Automated Driving Systems (ADS), where these methods often struggle with incomplete coverage of real-world scenarios. To enhance the robustness of such models, we introduce the use of Counterfactual Explanations (CFEs) as a novel data augmentation technique for end-to-end ADS. CFEs, by generating training samples near decision boundaries through minimal input modifications, lead to a more comprehensive representation of expert driver strategies, particularly in safety-critical scenarios. This approach can therefore help improve the model's ability to handle rare and challenging driving events, such as anticipating darting out pedestrians, ultimately leading to safer and more trustworthy decision-making for ADS. Our experiments in the CARLA simulator demonstrate that CF-Driver outperforms the current state-of-the-art method, achieving a higher driving score and lower infraction rates. Specifically, CF-Driver attains a driving score of 84.2, surpassing the previous best model by 15.02 percentage points. These results highlight the effectiveness of incorporating CFEs in training end-to-end ADS. To foster further research, the CF-Driver code is made publicly available.
HDRT: Infrared Capture for HDR Imaging
Jun 08, 2024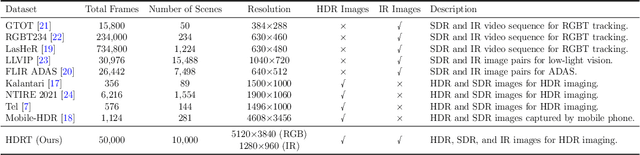
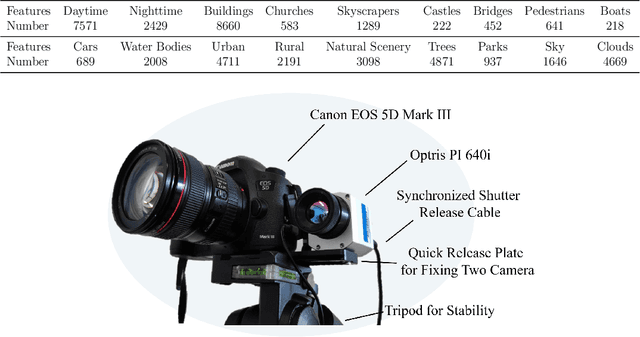
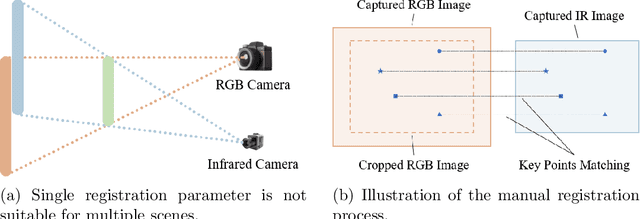
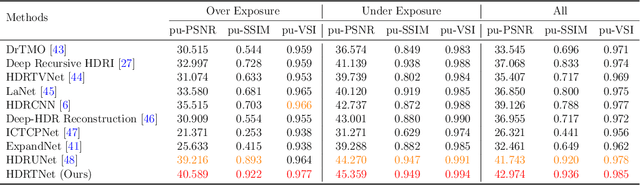
Capturing real world lighting is a long standing challenge in imaging and most practical methods acquire High Dynamic Range (HDR) images by either fusing multiple exposures, or boosting the dynamic range of Standard Dynamic Range (SDR) images. Multiple exposure capture is problematic as it requires longer capture times which can often lead to ghosting problems. The main alternative, inverse tone mapping is an ill-defined problem that is especially challenging as single captured exposures usually contain clipped and quantized values, and are therefore missing substantial amounts of content. To alleviate this, we propose a new approach, High Dynamic Range Thermal (HDRT), for HDR acquisition using a separate, commonly available, thermal infrared (IR) sensor. We propose a novel deep neural method (HDRTNet) which combines IR and SDR content to generate HDR images. HDRTNet learns to exploit IR features linked to the RGB image and the IR-specific parameters are subsequently used in a dual branch method that fuses features at shallow layers. This produces an HDR image that is significantly superior to that generated using naive fusion approaches. To validate our method, we have created the first HDR and thermal dataset, and performed extensive experiments comparing HDRTNet with the state-of-the-art. We show substantial quantitative and qualitative quality improvements on both over- and under-exposed images, showing that our approach is robust to capturing in multiple different lighting conditions.
Semantic Aware Diffusion Inverse Tone Mapping
May 24, 2024



The range of real-world scene luminance is larger than the capture capability of many digital camera sensors which leads to details being lost in captured images, most typically in bright regions. Inverse tone mapping attempts to boost these captured Standard Dynamic Range (SDR) images back to High Dynamic Range (HDR) by creating a mapping that linearizes the well exposed values from the SDR image, and provides a luminance boost to the clipped content. However, in most cases, the details in the clipped regions cannot be recovered or estimated. In this paper, we present a novel inverse tone mapping approach for mapping SDR images to HDR that generates lost details in clipped regions through a semantic-aware diffusion based inpainting approach. Our method proposes two major contributions - first, we propose to use a semantic graph to guide SDR diffusion based inpainting in masked regions in a saturated image. Second, drawing inspiration from traditional HDR imaging and bracketing methods, we propose a principled formulation to lift the SDR inpainted regions to HDR that is compatible with generative inpainting methods. Results show that our method demonstrates superior performance across different datasets on objective metrics, and subjective experiments show that the proposed method matches (and in most cases outperforms) state-of-art inverse tone mapping operators in terms of objective metrics and outperforms them for visual fidelity.
SAFE-RL: Saliency-Aware Counterfactual Explainer for Deep Reinforcement Learning Policies
Apr 28, 2024



While Deep Reinforcement Learning (DRL) has emerged as a promising solution for intricate control tasks, the lack of explainability of the learned policies impedes its uptake in safety-critical applications, such as automated driving systems (ADS). Counterfactual (CF) explanations have recently gained prominence for their ability to interpret black-box Deep Learning (DL) models. CF examples are associated with minimal changes in the input, resulting in a complementary output by the DL model. Finding such alternations, particularly for high-dimensional visual inputs, poses significant challenges. Besides, the temporal dependency introduced by the reliance of the DRL agent action on a history of past state observations further complicates the generation of CF examples. To address these challenges, we propose using a saliency map to identify the most influential input pixels across the sequence of past observed states by the agent. Then, we feed this map to a deep generative model, enabling the generation of plausible CFs with constrained modifications centred on the salient regions. We evaluate the effectiveness of our framework in diverse domains, including ADS, Atari Pong, Pacman and space-invaders games, using traditional performance metrics such as validity, proximity and sparsity. Experimental results demonstrate that this framework generates more informative and plausible CFs than the state-of-the-art for a wide range of environments and DRL agents. In order to foster research in this area, we have made our datasets and codes publicly available at https://github.com/Amir-Samadi/SAFE-RL.
Exploring Generative AI for Sim2Real in Driving Data Synthesis
Apr 14, 2024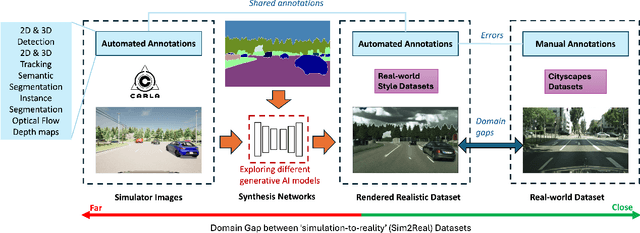

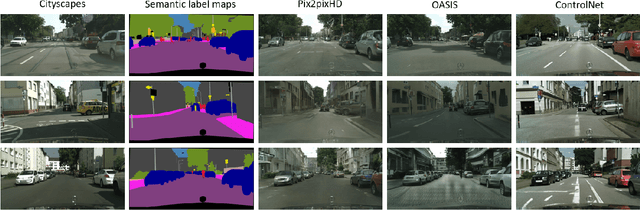
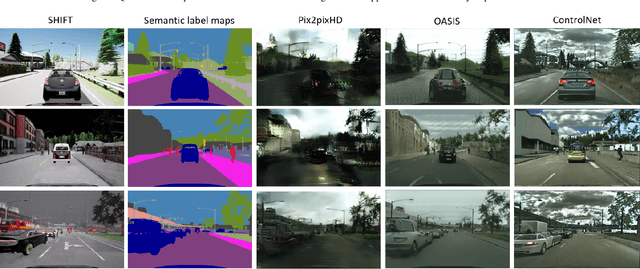
Datasets are essential for training and testing vehicle perception algorithms. However, the collection and annotation of real-world images is time-consuming and expensive. Driving simulators offer a solution by automatically generating various driving scenarios with corresponding annotations, but the simulation-to-reality (Sim2Real) domain gap remains a challenge. While most of the Generative Artificial Intelligence (AI) follows the de facto Generative Adversarial Nets (GANs)-based methods, the recent emerging diffusion probabilistic models have not been fully explored in mitigating Sim2Real challenges for driving data synthesis. To explore the performance, this paper applied three different generative AI methods to leverage semantic label maps from a driving simulator as a bridge for the creation of realistic datasets. A comparative analysis of these methods is presented from the perspective of image quality and perception. New synthetic datasets, which include driving images and auto-generated high-quality annotations, are produced with low costs and high scene variability. The experimental results show that although GAN-based methods are adept at generating high-quality images when provided with manually annotated labels, ControlNet produces synthetic datasets with fewer artefacts and more structural fidelity when using simulator-generated labels. This suggests that the diffusion-based approach may provide improved stability and an alternative method for addressing Sim2Real challenges.
Taming Transformers for Realistic Lidar Point Cloud Generation
Apr 08, 2024



Diffusion Models (DMs) have achieved State-Of-The-Art (SOTA) results in the Lidar point cloud generation task, benefiting from their stable training and iterative refinement during sampling. However, DMs often fail to realistically model Lidar raydrop noise due to their inherent denoising process. To retain the strength of iterative sampling while enhancing the generation of raydrop noise, we introduce LidarGRIT, a generative model that uses auto-regressive transformers to iteratively sample the range images in the latent space rather than image space. Furthermore, LidarGRIT utilises VQ-VAE to separately decode range images and raydrop masks. Our results show that LidarGRIT achieves superior performance compared to SOTA models on KITTI-360 and KITTI odometry datasets. Code available at:https://github.com/hamedhaghighi/LidarGRIT.
Benchmarking the Robustness of Panoptic Segmentation for Automated Driving
Feb 23, 2024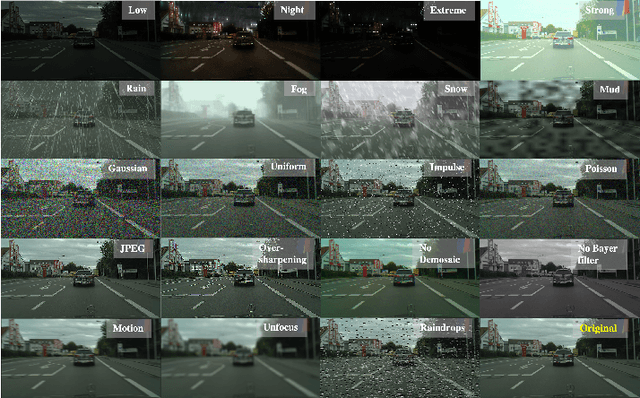
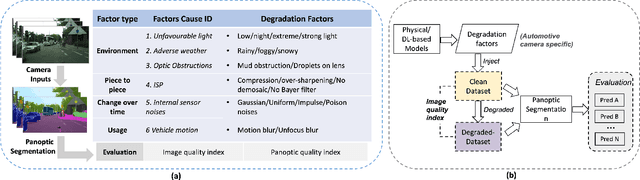
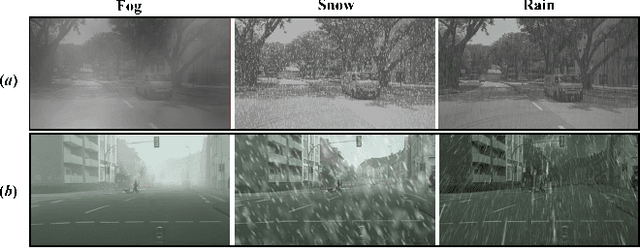
Precise situational awareness is required for the safe decision-making of assisted and automated driving (AAD) functions. Panoptic segmentation is a promising perception technique to identify and categorise objects, impending hazards, and driveable space at a pixel level. While segmentation quality is generally associated with the quality of the camera data, a comprehensive understanding and modelling of this relationship are paramount for AAD system designers. Motivated by such a need, this work proposes a unifying pipeline to assess the robustness of panoptic segmentation models for AAD, correlating it with traditional image quality. The first step of the proposed pipeline involves generating degraded camera data that reflects real-world noise factors. To this end, 19 noise factors have been identified and implemented with 3 severity levels. Of these factors, this work proposes novel models for unfavourable light and snow. After applying the degradation models, three state-of-the-art CNN- and vision transformers (ViT)-based panoptic segmentation networks are used to analyse their robustness. The variations of the segmentation performance are then correlated to 8 selected image quality metrics. This research reveals that: 1) certain specific noise factors produce the highest impact on panoptic segmentation, i.e. droplets on lens and Gaussian noise; 2) the ViT-based panoptic segmentation backbones show better robustness to the considered noise factors; 3) some image quality metrics (i.e. LPIPS and CW-SSIM) correlate strongly with panoptic segmentation performance and therefore they can be used as predictive metrics for network performance.
Contrastive Learning-Based Framework for Sim-to-Real Mapping of Lidar Point Clouds in Autonomous Driving Systems
Dec 25, 2023



Perception sensor models are essential elements of automotive simulation environments; they also serve as powerful tools for creating synthetic datasets to train deep learning-based perception models. Developing realistic perception sensor models poses a significant challenge due to the large gap between simulated sensor data and real-world sensor outputs, known as the sim-to-real gap. To address this problem, learning-based models have emerged as promising solutions in recent years, with unparalleled potential to map low-fidelity simulated sensor data into highly realistic outputs. Motivated by this potential, this paper focuses on sim-to-real mapping of Lidar point clouds, a widely used perception sensor in automated driving systems. We introduce a novel Contrastive-Learning-based Sim-to-Real mapping framework, namely CLS2R, inspired by the recent advancements in image-to-image translation techniques. The proposed CLS2R framework employs a lossless representation of Lidar point clouds, considering all essential Lidar attributes such as depth, reflectance, and raydrop. We extensively evaluate the proposed framework, comparing it with state-of-the-art image-to-image translation methods using a diverse range of metrics to assess realness, faithfulness, and the impact on the performance of a downstream task. Our results show that CLS2R demonstrates superior performance across nearly all metrics. Source code is available at https://github.com/hamedhaghighi/CLS2R.git.