 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeREHEARSE-3D: A Multi-modal Emulated Rain Dataset for 3D Point Cloud De-raining
Apr 30, 2025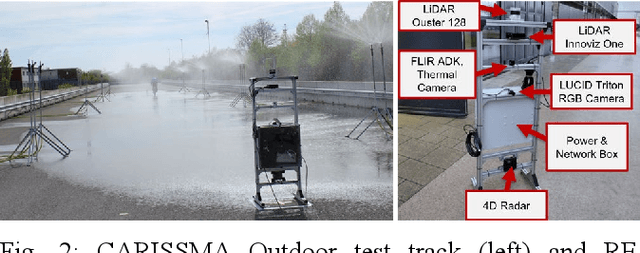
Sensor degradation poses a significant challenge in autonomous driving. During heavy rainfall, the interference from raindrops can adversely affect the quality of LiDAR point clouds, resulting in, for instance, inaccurate point measurements. This, in turn, can potentially lead to safety concerns if autonomous driving systems are not weather-aware, i.e., if they are unable to discern such changes. In this study, we release a new, large-scale, multi-modal emulated rain dataset, REHEARSE-3D, to promote research advancements in 3D point cloud de-raining. Distinct from the most relevant competitors, our dataset is unique in several respects. First, it is the largest point-wise annotated dataset, and second, it is the only one with high-resolution LiDAR data (LiDAR-256) enriched with 4D Radar point clouds logged in both daytime and nighttime conditions in a controlled weather environment. Furthermore, REHEARSE-3D involves rain-characteristic information, which is of significant value not only for sensor noise modeling but also for analyzing the impact of weather at a point level. Leveraging REHEARSE-3D, we benchmark raindrop detection and removal in fused LiDAR and 4D Radar point clouds. Our comprehensive study further evaluates the performance of various statistical and deep-learning models. Upon publication, the dataset and benchmark models will be made publicly available at: https://sporsho.github.io/REHEARSE3D.
Taming Transformers for Realistic Lidar Point Cloud Generation
Apr 08, 2024



Diffusion Models (DMs) have achieved State-Of-The-Art (SOTA) results in the Lidar point cloud generation task, benefiting from their stable training and iterative refinement during sampling. However, DMs often fail to realistically model Lidar raydrop noise due to their inherent denoising process. To retain the strength of iterative sampling while enhancing the generation of raydrop noise, we introduce LidarGRIT, a generative model that uses auto-regressive transformers to iteratively sample the range images in the latent space rather than image space. Furthermore, LidarGRIT utilises VQ-VAE to separately decode range images and raydrop masks. Our results show that LidarGRIT achieves superior performance compared to SOTA models on KITTI-360 and KITTI odometry datasets. Code available at:https://github.com/hamedhaghighi/LidarGRIT.
Contrastive Learning-Based Framework for Sim-to-Real Mapping of Lidar Point Clouds in Autonomous Driving Systems
Dec 25, 2023



Perception sensor models are essential elements of automotive simulation environments; they also serve as powerful tools for creating synthetic datasets to train deep learning-based perception models. Developing realistic perception sensor models poses a significant challenge due to the large gap between simulated sensor data and real-world sensor outputs, known as the sim-to-real gap. To address this problem, learning-based models have emerged as promising solutions in recent years, with unparalleled potential to map low-fidelity simulated sensor data into highly realistic outputs. Motivated by this potential, this paper focuses on sim-to-real mapping of Lidar point clouds, a widely used perception sensor in automated driving systems. We introduce a novel Contrastive-Learning-based Sim-to-Real mapping framework, namely CLS2R, inspired by the recent advancements in image-to-image translation techniques. The proposed CLS2R framework employs a lossless representation of Lidar point clouds, considering all essential Lidar attributes such as depth, reflectance, and raydrop. We extensively evaluate the proposed framework, comparing it with state-of-the-art image-to-image translation methods using a diverse range of metrics to assess realness, faithfulness, and the impact on the performance of a downstream task. Our results show that CLS2R demonstrates superior performance across nearly all metrics. Source code is available at https://github.com/hamedhaghighi/CLS2R.git.