 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGood Data Is All Imitation Learning Needs
Paper and Code
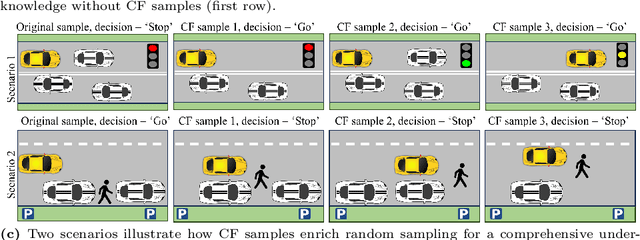
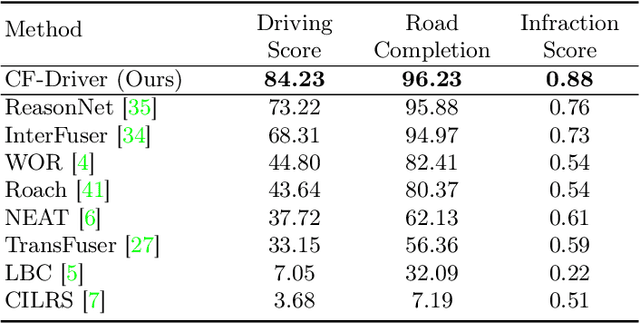
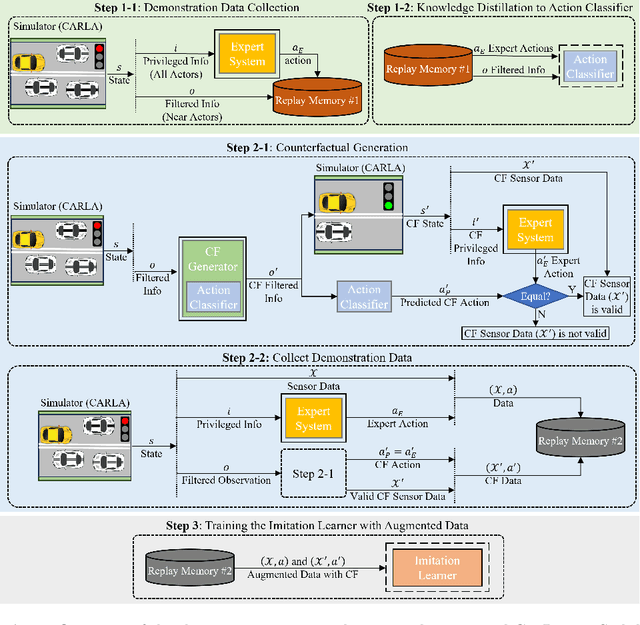

In this paper, we address the limitations of traditional teacher-student models, imitation learning, and behaviour cloning in the context of Autonomous/Automated Driving Systems (ADS), where these methods often struggle with incomplete coverage of real-world scenarios. To enhance the robustness of such models, we introduce the use of Counterfactual Explanations (CFEs) as a novel data augmentation technique for end-to-end ADS. CFEs, by generating training samples near decision boundaries through minimal input modifications, lead to a more comprehensive representation of expert driver strategies, particularly in safety-critical scenarios. This approach can therefore help improve the model's ability to handle rare and challenging driving events, such as anticipating darting out pedestrians, ultimately leading to safer and more trustworthy decision-making for ADS. Our experiments in the CARLA simulator demonstrate that CF-Driver outperforms the current state-of-the-art method, achieving a higher driving score and lower infraction rates. Specifically, CF-Driver attains a driving score of 84.2, surpassing the previous best model by 15.02 percentage points. These results highlight the effectiveness of incorporating CFEs in training end-to-end ADS. To foster further research, the CF-Driver code is made publicly available.