 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrajGenAgent: A Hierarchical LLM Agent for Human Mobility Trajectory Generation
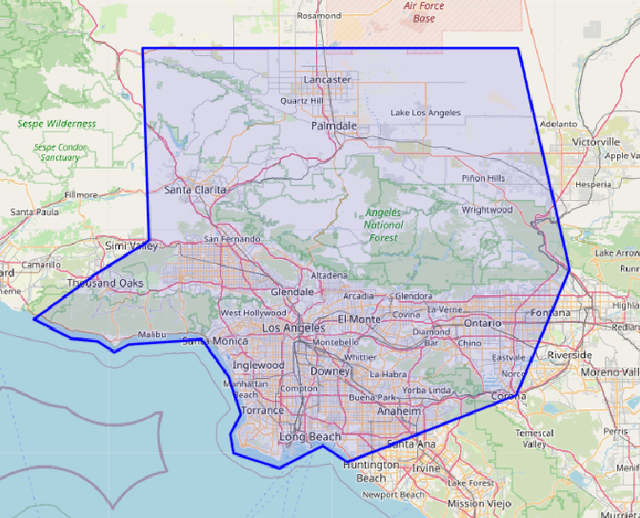
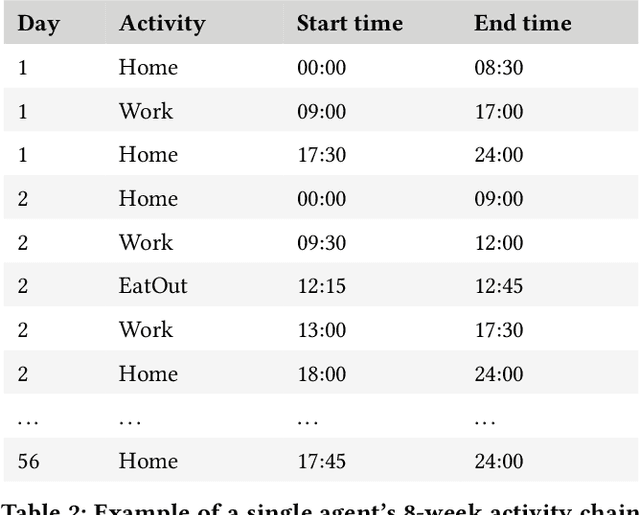
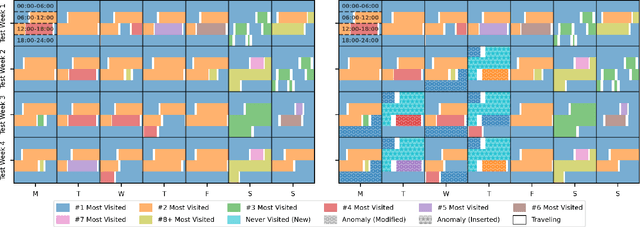
Jun 10, 2026Human mobility data is important for transportation, urban planning, and epidemic control, but large-scale trajectory collection is often costly and privacy-constrained, motivating realistic synthetic trajectory generation. Existing LLM-based generators typically rely on either prompt engineering, which preserves zero-shot reasoning but lacks fine-grained spatiotemporal grounding, or trajectory-level fine-tuning, which improves statistical precision but incurs substantial computational cost and may weaken general reasoning. We propose TrajGenAgent, a semantic-aware hierarchical LLM-agent framework for human mobility trajectory generation without model fine-tuning. TrajGenAgent uses a two-stage orchestrator-worker design: an LLM first synthesizes an individual- and weekday-conditioned activity chain from historical evidence via in-context learning, and a deterministic workflow then grounds each activity into a complete visit using personalized POI retrieval, distance-aware location selection, kinematics-aware travel-time propagation, and LLM-based duration estimation. To evaluate realism beyond aggregate spatiotemporal statistics, we introduce an anomaly-detection-based evaluation framework using two complementary detectors to assess behavioral and semantic plausibility. Experiments on benchmark and large-scale simulation datasets show that TrajGenAgent improves spatiotemporal fidelity, semantic coherence, and individual-specific behavioral realism over representative neural and LLM-based baselines, while avoiding parameter updates.
From Symbolic to Geometric: Enabling Spatial Reasoning in Large Language Models
Jun 03, 2026Recent large language models (LLMs) often appear to exhibit spatial reasoning ability; however, this capability is largely \emph{symbolic}, arising from pattern matching over spatial language rather than true \emph{geometric} reasoning over space. Because LLMs operate on discrete tokens, they lack native support for continuous spatial representations, explicit geometric computation, and structured spatial operators. To address this limitation, we introduce the \emph{Spatial Language Model (SLM)}, the first multimodal LLM that treats location information as a first-class modality and enables geometric spatial reasoning within the model's inference process. SLM directly operates on learned spatial representations rather than textual descriptions of spatial relations. To support effective training, we construct a \emph{Spatial Instruction Dataset} that aligns spatial representations, atomic geometric operations, and natural language instructions. We further propose a new benchmark named \emph{SpatialEval}, which is designed to evaluate spatial reasoning across attributes, distance, topology, and relative-position tasks. Extensive experiments show that SLM significantly outperforms existing LLM-based approaches that rely on symbolic reasoning via prompt engineering or textual abstraction, demonstrating the benefits of integrating geometric spatial representations for robust spatial reasoning. Our instruction dataset, evaluation benchmark, model training codes, and models' checkpoints can be found at: \hyperlink{https://github.com/chuchen2017/SLM}{https://github.com/chuchen2017/SLM}.
NARA: Anchor-Conditioned Relation-Aware Contextualization of Heterogeneous Geoentities
May 12, 2026Geospatial foundation models have primarily focused on raster data such as satellite imagery, where self-supervised learning has been widely studied. Vector geospatial data instead represent the world as discrete geoentities with explicit geometry, semantics, and structured spatial relations, including metric proximity and topological relationships. These relations jointly determine how entities interact within space, yet existing representation learning methods remain fragmented, often restricted to specific geometry types or partial spatial relations, limiting their ability to capture unified spatial context across heterogeneous geoentities. We propose NARA (Neural Anchor-conditioned Relation-Aware representation learning), a self-supervised framework for vector geoentities. NARA learns context-dependent representations by jointly modeling semantics, geometry, and spatial relations within a unified framework and captures relational spatial structure beyond proximity alone, enabling rich contextualized representations across heterogeneous geoentities of points, polylines, and polygons. Evaluation on building function classification, traffic speed prediction, and next point-of-interest recommendation shows consistent improvements over prior methods, highlighting the benefit of unified relational modeling for vector geospatial data.
TrajGPT: Controlled Synthetic Trajectory Generation Using a Multitask Transformer-Based Spatiotemporal Model
Nov 07, 2024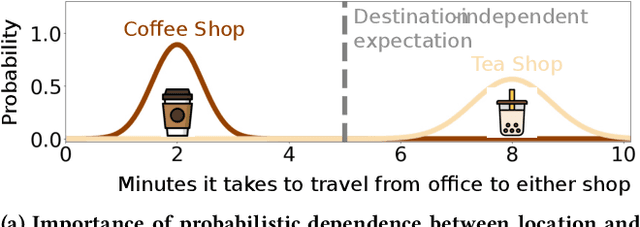
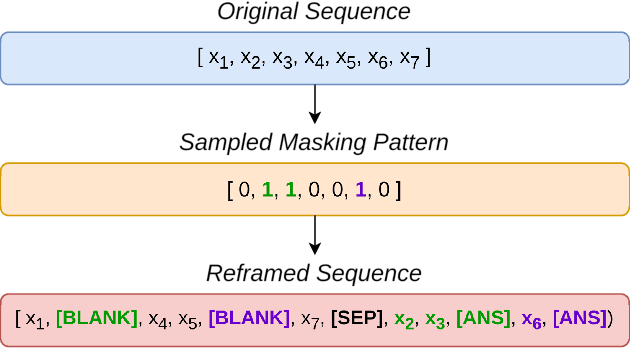

Human mobility modeling from GPS-trajectories and synthetic trajectory generation are crucial for various applications, such as urban planning, disaster management and epidemiology. Both of these tasks often require filling gaps in a partially specified sequence of visits - a new problem that we call "controlled" synthetic trajectory generation. Existing methods for next-location prediction or synthetic trajectory generation cannot solve this problem as they lack the mechanisms needed to constrain the generated sequences of visits. Moreover, existing approaches (1) frequently treat space and time as independent factors, an assumption that fails to hold true in real-world scenarios, and (2) suffer from challenges in accuracy of temporal prediction as they fail to deal with mixed distributions and the inter-relationships of different modes with latent variables (e.g., day-of-the-week). These limitations become even more pronounced when the task involves filling gaps within sequences instead of solely predicting the next visit. We introduce TrajGPT, a transformer-based, multi-task, joint spatiotemporal generative model to address these issues. Taking inspiration from large language models, TrajGPT poses the problem of controlled trajectory generation as that of text infilling in natural language. TrajGPT integrates the spatial and temporal models in a transformer architecture through a Bayesian probability model that ensures that the gaps in a visit sequence are filled in a spatiotemporally consistent manner. Our experiments on public and private datasets demonstrate that TrajGPT not only excels in controlled synthetic visit generation but also outperforms competing models in next-location prediction tasks - Relatively, TrajGPT achieves a 26-fold improvement in temporal accuracy while retaining more than 98% of spatial accuracy on average.
A System for Critical Facility and Resource Optimization in Disaster Management and Planning
Oct 03, 2024



Disruptions to medical infrastructure during disasters pose significant risks to critically ill patients with advanced chronic kidney disease or end-stage renal disease. To enhance patient access to dialysis treatment under such conditions, it is crucial to assess the vulnerabilities of critical care facilities to hazardous events. This study proposes optimization models for patient reallocation and the strategic placement of temporary medical facilities to bolster the resilience of the critical care system, with a focus on equitable outcomes. Utilizing human mobility data from Texas, we evaluate patient access to critical care and dialysis centers under simulated hazard scenarios. The proposed bio-inspired optimization model, based on the Ant Colony optimization method, efficiently reallocates patients to mitigate disrupted access to dialysis facilities. The model outputs offer valuable insights into patient and hospital preparedness for disasters. Overall, the study presents a data-driven, analytics-based decision support tool designed to proactively mitigate potential disruptions in access to critical care facilities during disasters, tailored to the needs of health officials, emergency managers, and hospital system administrators in both the private and public sectors.
Back to Bayesics: Uncovering Human Mobility Distributions and Anomalies with an Integrated Statistical and Neural Framework
Oct 01, 2024Existing methods for anomaly detection often fall short due to their inability to handle the complexity, heterogeneity, and high dimensionality inherent in real-world mobility data. In this paper, we propose DeepBayesic, a novel framework that integrates Bayesian principles with deep neural networks to model the underlying multivariate distributions from sparse and complex datasets. Unlike traditional models, DeepBayesic is designed to manage heterogeneous inputs, accommodating both continuous and categorical data to provide a more comprehensive understanding of mobility patterns. The framework features customized neural density estimators and hybrid architectures, allowing for flexibility in modeling diverse feature distributions and enabling the use of specialized neural networks tailored to different data types. Our approach also leverages agent embeddings for personalized anomaly detection, enhancing its ability to distinguish between normal and anomalous behaviors for individual agents. We evaluate our approach on several mobility datasets, demonstrating significant improvements over state-of-the-art anomaly detection methods. Our results indicate that incorporating personalization and advanced sequence modeling techniques can substantially enhance the ability to detect subtle and complex anomalies in spatiotemporal event sequences.
NUMOSIM: A Synthetic Mobility Dataset with Anomaly Detection Benchmarks
Sep 04, 2024
Collecting real-world mobility data is challenging. It is often fraught with privacy concerns, logistical difficulties, and inherent biases. Moreover, accurately annotating anomalies in large-scale data is nearly impossible, as it demands meticulous effort to distinguish subtle and complex patterns. These challenges significantly impede progress in geospatial anomaly detection research by restricting access to reliable data and complicating the rigorous evaluation, comparison, and benchmarking of methodologies. To address these limitations, we introduce a synthetic mobility dataset, NUMOSIM, that provides a controlled, ethical, and diverse environment for benchmarking anomaly detection techniques. NUMOSIM simulates a wide array of realistic mobility scenarios, encompassing both typical and anomalous behaviours, generated through advanced deep learning models trained on real mobility data. This approach allows NUMOSIM to accurately replicate the complexities of real-world movement patterns while strategically injecting anomalies to challenge and evaluate detection algorithms based on how effectively they capture the interplay between demographic, geospatial, and temporal factors. Our goal is to advance geospatial mobility analysis by offering a realistic benchmark for improving anomaly detection and mobility modeling techniques. To support this, we provide open access to the NUMOSIM dataset, along with comprehensive documentation, evaluation metrics, and benchmark results.
Learning Citywide Patterns of Life from Trajectory Monitoring
Jun 30, 2022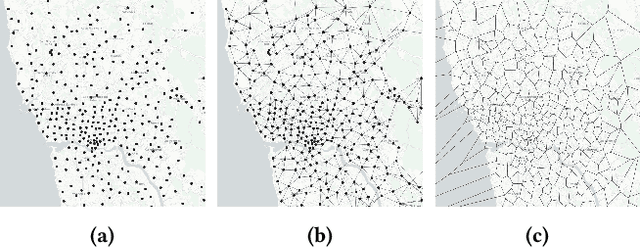
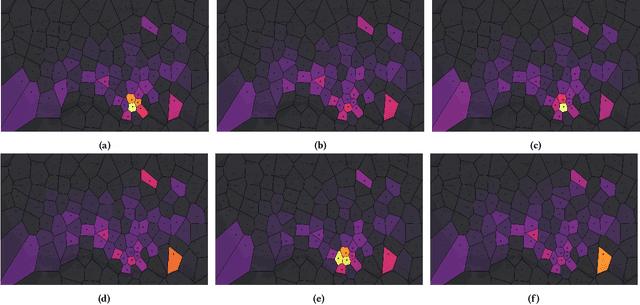
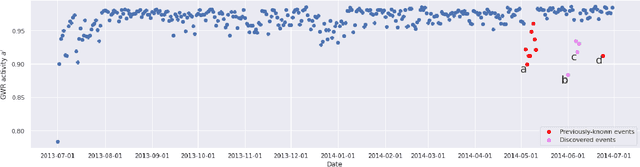
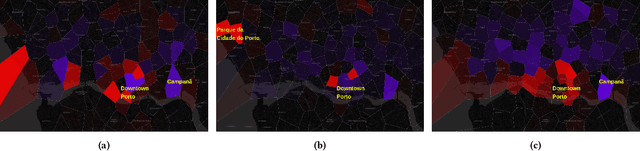
The recent proliferation of real-world human mobility datasets has catalyzed geospatial and transportation research in trajectory prediction, demand forecasting, travel time estimation, and anomaly detection. However, these datasets also enable, more broadly, a descriptive analysis of intricate systems of human mobility. We formally define patterns of life analysis as a natural, explainable extension of online unsupervised anomaly detection, where we not only monitor a data stream for anomalies but also explicitly extract normal patterns over time. To learn patterns of life, we adapt Grow When Required (GWR) episodic memory from research in computational biology and neurorobotics to a new domain of geospatial analysis. This biologically-inspired neural network, related to self-organizing maps (SOM), constructs a set of "memories" or prototype traffic patterns incrementally as it iterates over the GPS stream. It then compares each new observation to its prior experiences, inducing an online, unsupervised clustering and anomaly detection on the data. We mine patterns-of-interest from the Porto taxi dataset, including both major public holidays and newly-discovered transportation anomalies, such as festivals and concerts which, to our knowledge, have not been previously acknowledged or reported in prior work. We anticipate that the capability to incrementally learn normal and abnormal road transportation behavior will be useful in many domains, including smart cities, autonomous vehicles, and urban planning and management.
Meta-Learning over Time for Destination Prediction Tasks
Jun 29, 2022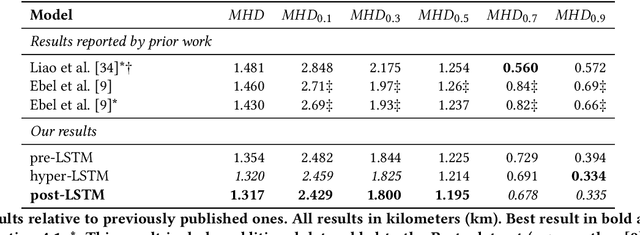
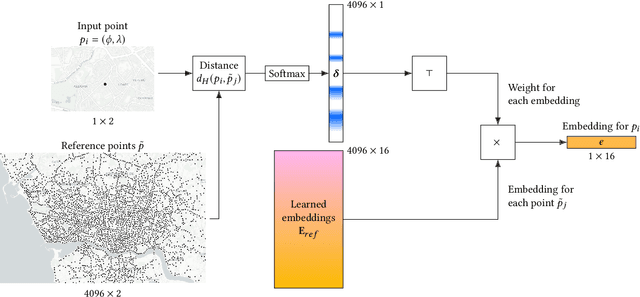
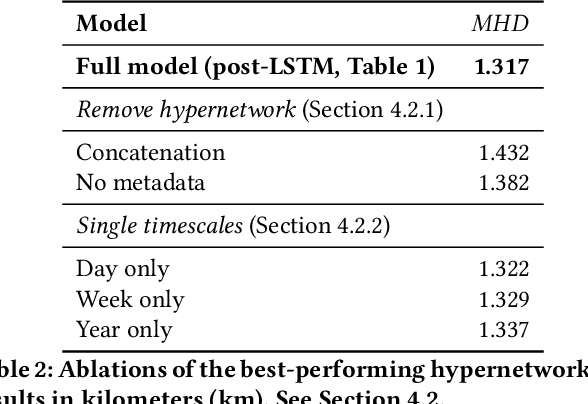
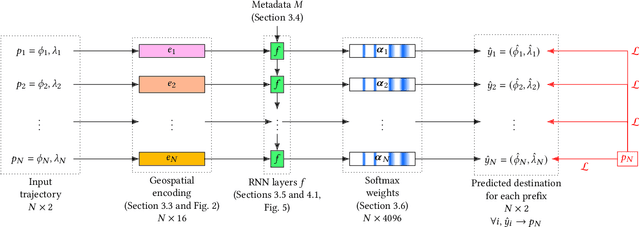
A need to understand and predict vehicles' behavior underlies both public and private goals in the transportation domain, including urban planning and management, ride-sharing services, and intelligent transportation systems. Individuals' preferences and intended destinations vary throughout the day, week, and year: for example, bars are most popular in the evenings, and beaches are most popular in the summer. Despite this principle, we note that recent studies on a popular benchmark dataset from Porto, Portugal have found, at best, only marginal improvements in predictive performance from incorporating temporal information. We propose an approach based on hypernetworks, a variant of meta-learning ("learning to learn") in which a neural network learns to change its own weights in response to an input. In our case, the weights responsible for destination prediction vary with the metadata, in particular the time, of the input trajectory. The time-conditioned weights notably improve the model's error relative to ablation studies and comparable prior work, and we confirm our hypothesis that knowledge of time should improve prediction of a vehicle's intended destination.