 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrajGPT: Controlled Synthetic Trajectory Generation Using a Multitask Transformer-Based Spatiotemporal Model
Paper and Code
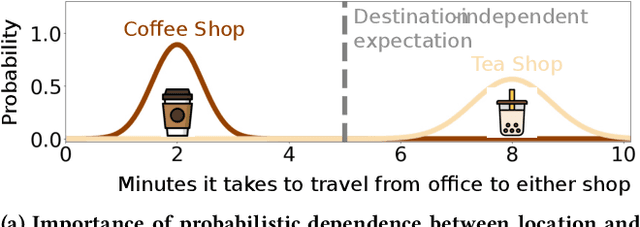
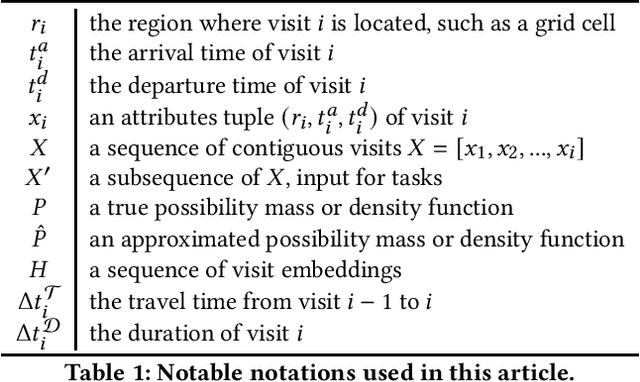
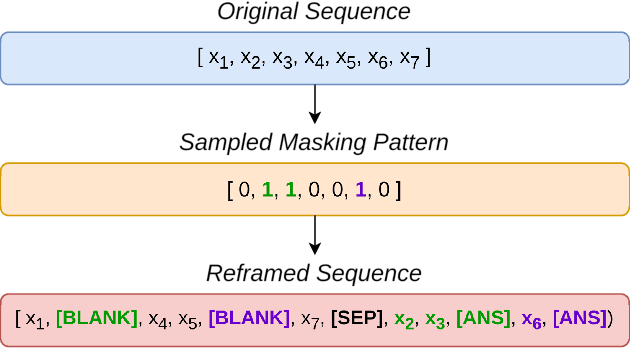

Human mobility modeling from GPS-trajectories and synthetic trajectory generation are crucial for various applications, such as urban planning, disaster management and epidemiology. Both of these tasks often require filling gaps in a partially specified sequence of visits - a new problem that we call "controlled" synthetic trajectory generation. Existing methods for next-location prediction or synthetic trajectory generation cannot solve this problem as they lack the mechanisms needed to constrain the generated sequences of visits. Moreover, existing approaches (1) frequently treat space and time as independent factors, an assumption that fails to hold true in real-world scenarios, and (2) suffer from challenges in accuracy of temporal prediction as they fail to deal with mixed distributions and the inter-relationships of different modes with latent variables (e.g., day-of-the-week). These limitations become even more pronounced when the task involves filling gaps within sequences instead of solely predicting the next visit. We introduce TrajGPT, a transformer-based, multi-task, joint spatiotemporal generative model to address these issues. Taking inspiration from large language models, TrajGPT poses the problem of controlled trajectory generation as that of text infilling in natural language. TrajGPT integrates the spatial and temporal models in a transformer architecture through a Bayesian probability model that ensures that the gaps in a visit sequence are filled in a spatiotemporally consistent manner. Our experiments on public and private datasets demonstrate that TrajGPT not only excels in controlled synthetic visit generation but also outperforms competing models in next-location prediction tasks - Relatively, TrajGPT achieves a 26-fold improvement in temporal accuracy while retaining more than 98% of spatial accuracy on average.