 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrajGPT: Controlled Synthetic Trajectory Generation Using a Multitask Transformer-Based Spatiotemporal Model
Nov 07, 2024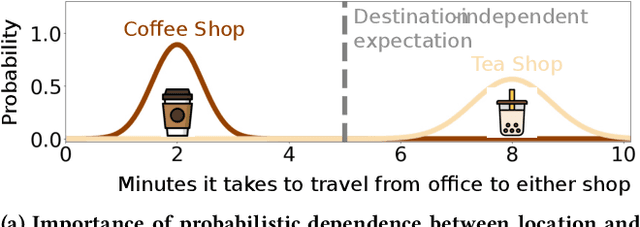
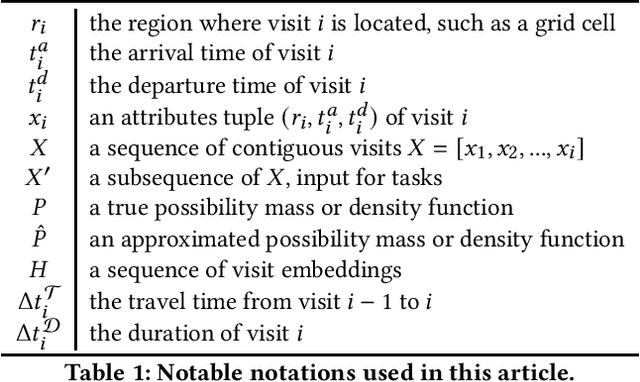
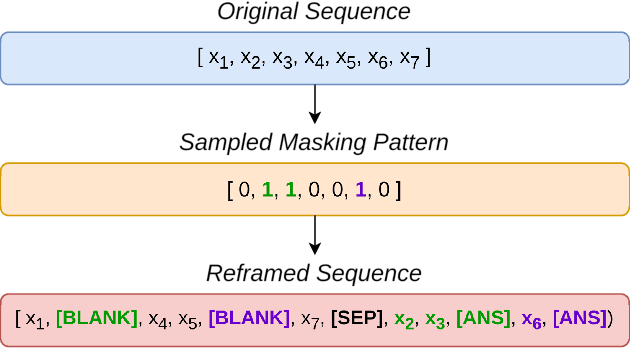

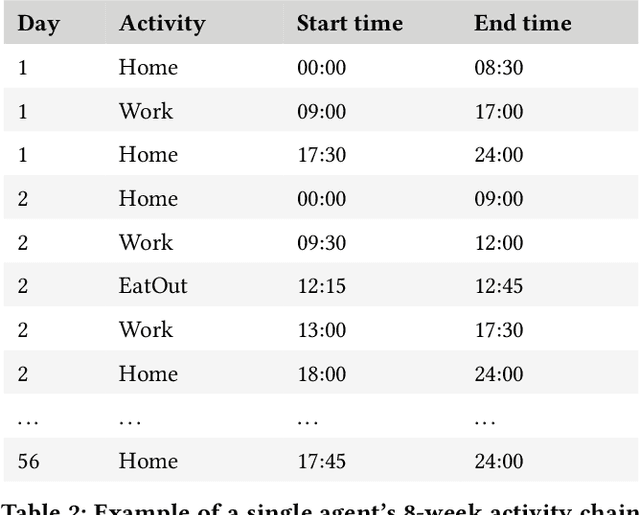
Human mobility modeling from GPS-trajectories and synthetic trajectory generation are crucial for various applications, such as urban planning, disaster management and epidemiology. Both of these tasks often require filling gaps in a partially specified sequence of visits - a new problem that we call "controlled" synthetic trajectory generation. Existing methods for next-location prediction or synthetic trajectory generation cannot solve this problem as they lack the mechanisms needed to constrain the generated sequences of visits. Moreover, existing approaches (1) frequently treat space and time as independent factors, an assumption that fails to hold true in real-world scenarios, and (2) suffer from challenges in accuracy of temporal prediction as they fail to deal with mixed distributions and the inter-relationships of different modes with latent variables (e.g., day-of-the-week). These limitations become even more pronounced when the task involves filling gaps within sequences instead of solely predicting the next visit. We introduce TrajGPT, a transformer-based, multi-task, joint spatiotemporal generative model to address these issues. Taking inspiration from large language models, TrajGPT poses the problem of controlled trajectory generation as that of text infilling in natural language. TrajGPT integrates the spatial and temporal models in a transformer architecture through a Bayesian probability model that ensures that the gaps in a visit sequence are filled in a spatiotemporally consistent manner. Our experiments on public and private datasets demonstrate that TrajGPT not only excels in controlled synthetic visit generation but also outperforms competing models in next-location prediction tasks - Relatively, TrajGPT achieves a 26-fold improvement in temporal accuracy while retaining more than 98% of spatial accuracy on average.
A System for Critical Facility and Resource Optimization in Disaster Management and Planning
Oct 03, 2024



Disruptions to medical infrastructure during disasters pose significant risks to critically ill patients with advanced chronic kidney disease or end-stage renal disease. To enhance patient access to dialysis treatment under such conditions, it is crucial to assess the vulnerabilities of critical care facilities to hazardous events. This study proposes optimization models for patient reallocation and the strategic placement of temporary medical facilities to bolster the resilience of the critical care system, with a focus on equitable outcomes. Utilizing human mobility data from Texas, we evaluate patient access to critical care and dialysis centers under simulated hazard scenarios. The proposed bio-inspired optimization model, based on the Ant Colony optimization method, efficiently reallocates patients to mitigate disrupted access to dialysis facilities. The model outputs offer valuable insights into patient and hospital preparedness for disasters. Overall, the study presents a data-driven, analytics-based decision support tool designed to proactively mitigate potential disruptions in access to critical care facilities during disasters, tailored to the needs of health officials, emergency managers, and hospital system administrators in both the private and public sectors.
NUMOSIM: A Synthetic Mobility Dataset with Anomaly Detection Benchmarks
Sep 04, 2024
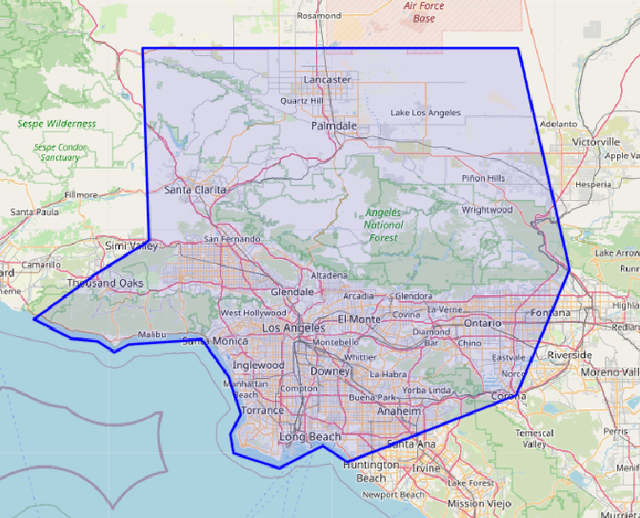
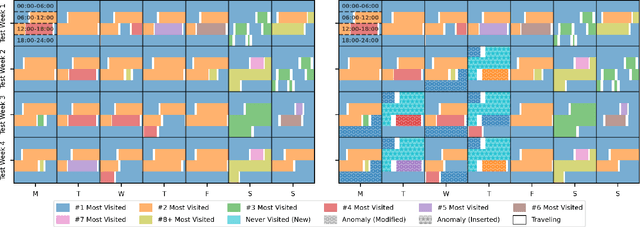
Collecting real-world mobility data is challenging. It is often fraught with privacy concerns, logistical difficulties, and inherent biases. Moreover, accurately annotating anomalies in large-scale data is nearly impossible, as it demands meticulous effort to distinguish subtle and complex patterns. These challenges significantly impede progress in geospatial anomaly detection research by restricting access to reliable data and complicating the rigorous evaluation, comparison, and benchmarking of methodologies. To address these limitations, we introduce a synthetic mobility dataset, NUMOSIM, that provides a controlled, ethical, and diverse environment for benchmarking anomaly detection techniques. NUMOSIM simulates a wide array of realistic mobility scenarios, encompassing both typical and anomalous behaviours, generated through advanced deep learning models trained on real mobility data. This approach allows NUMOSIM to accurately replicate the complexities of real-world movement patterns while strategically injecting anomalies to challenge and evaluate detection algorithms based on how effectively they capture the interplay between demographic, geospatial, and temporal factors. Our goal is to advance geospatial mobility analysis by offering a realistic benchmark for improving anomaly detection and mobility modeling techniques. To support this, we provide open access to the NUMOSIM dataset, along with comprehensive documentation, evaluation metrics, and benchmark results.