 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Citywide Patterns of Life from Trajectory Monitoring
Jun 30, 2022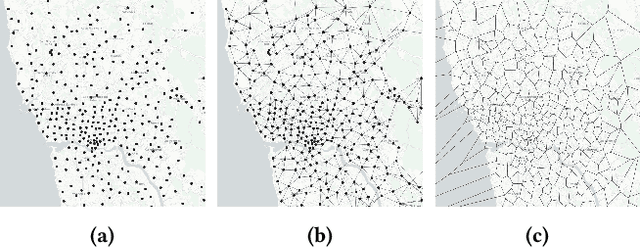
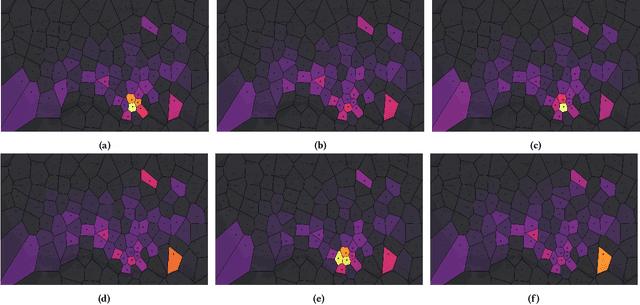
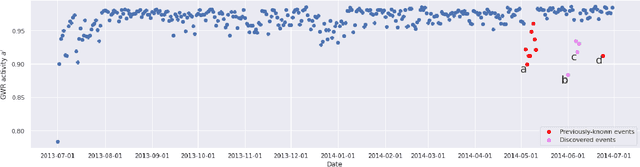
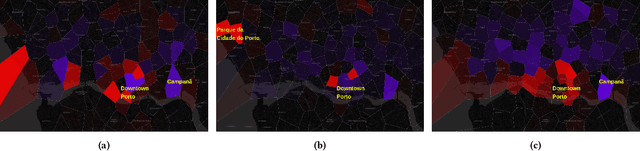
The recent proliferation of real-world human mobility datasets has catalyzed geospatial and transportation research in trajectory prediction, demand forecasting, travel time estimation, and anomaly detection. However, these datasets also enable, more broadly, a descriptive analysis of intricate systems of human mobility. We formally define patterns of life analysis as a natural, explainable extension of online unsupervised anomaly detection, where we not only monitor a data stream for anomalies but also explicitly extract normal patterns over time. To learn patterns of life, we adapt Grow When Required (GWR) episodic memory from research in computational biology and neurorobotics to a new domain of geospatial analysis. This biologically-inspired neural network, related to self-organizing maps (SOM), constructs a set of "memories" or prototype traffic patterns incrementally as it iterates over the GPS stream. It then compares each new observation to its prior experiences, inducing an online, unsupervised clustering and anomaly detection on the data. We mine patterns-of-interest from the Porto taxi dataset, including both major public holidays and newly-discovered transportation anomalies, such as festivals and concerts which, to our knowledge, have not been previously acknowledged or reported in prior work. We anticipate that the capability to incrementally learn normal and abnormal road transportation behavior will be useful in many domains, including smart cities, autonomous vehicles, and urban planning and management.
Meta-Learning over Time for Destination Prediction Tasks
Jun 29, 2022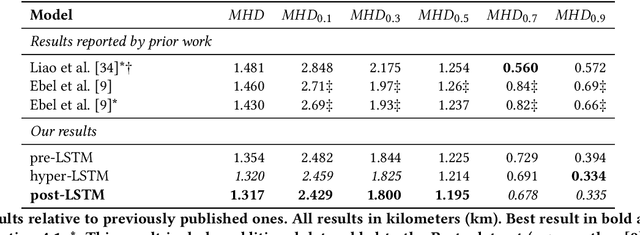
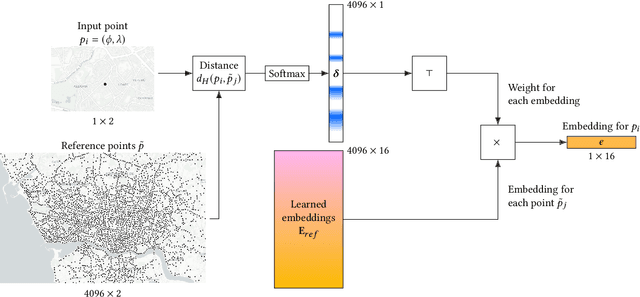
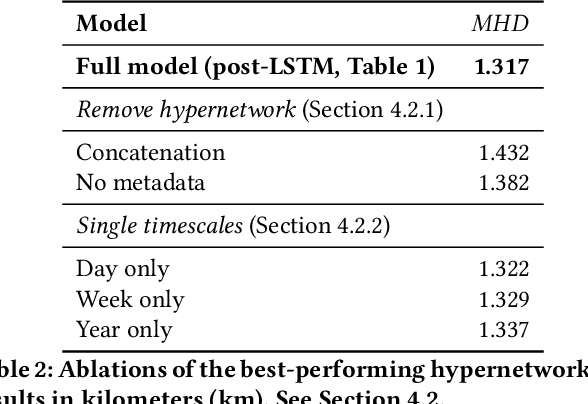
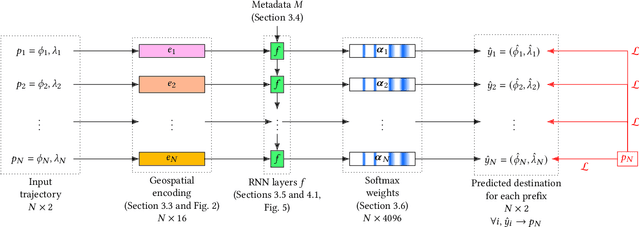
A need to understand and predict vehicles' behavior underlies both public and private goals in the transportation domain, including urban planning and management, ride-sharing services, and intelligent transportation systems. Individuals' preferences and intended destinations vary throughout the day, week, and year: for example, bars are most popular in the evenings, and beaches are most popular in the summer. Despite this principle, we note that recent studies on a popular benchmark dataset from Porto, Portugal have found, at best, only marginal improvements in predictive performance from incorporating temporal information. We propose an approach based on hypernetworks, a variant of meta-learning ("learning to learn") in which a neural network learns to change its own weights in response to an input. In our case, the weights responsible for destination prediction vary with the metadata, in particular the time, of the input trajectory. The time-conditioned weights notably improve the model's error relative to ablation studies and comparable prior work, and we confirm our hypothesis that knowledge of time should improve prediction of a vehicle's intended destination.