 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAchieving Human Level Competitive Robot Table Tennis
Aug 07, 2024



Achieving human-level speed and performance on real world tasks is a north star for the robotics research community. This work takes a step towards that goal and presents the first learned robot agent that reaches amateur human-level performance in competitive table tennis. Table tennis is a physically demanding sport which requires human players to undergo years of training to achieve an advanced level of proficiency. In this paper, we contribute (1) a hierarchical and modular policy architecture consisting of (i) low level controllers with their detailed skill descriptors which model the agent's capabilities and help to bridge the sim-to-real gap and (ii) a high level controller that chooses the low level skills, (2) techniques for enabling zero-shot sim-to-real including an iterative approach to defining the task distribution that is grounded in the real-world and defines an automatic curriculum, and (3) real time adaptation to unseen opponents. Policy performance was assessed through 29 robot vs. human matches of which the robot won 45% (13/29). All humans were unseen players and their skill level varied from beginner to tournament level. Whilst the robot lost all matches vs. the most advanced players it won 100% matches vs. beginners and 55% matches vs. intermediate players, demonstrating solidly amateur human-level performance. Videos of the matches can be viewed at https://sites.google.com/view/competitive-robot-table-tennis
Open X-Embodiment: Robotic Learning Datasets and RT-X Models
Oct 17, 2023



Large, high-capacity models trained on diverse datasets have shown remarkable successes on efficiently tackling downstream applications. In domains from NLP to Computer Vision, this has led to a consolidation of pretrained models, with general pretrained backbones serving as a starting point for many applications. Can such a consolidation happen in robotics? Conventionally, robotic learning methods train a separate model for every application, every robot, and even every environment. Can we instead train generalist X-robot policy that can be adapted efficiently to new robots, tasks, and environments? In this paper, we provide datasets in standardized data formats and models to make it possible to explore this possibility in the context of robotic manipulation, alongside experimental results that provide an example of effective X-robot policies. We assemble a dataset from 22 different robots collected through a collaboration between 21 institutions, demonstrating 527 skills (160266 tasks). We show that a high-capacity model trained on this data, which we call RT-X, exhibits positive transfer and improves the capabilities of multiple robots by leveraging experience from other platforms. More details can be found on the project website $\href{https://robotics-transformer-x.github.io}{\text{robotics-transformer-x.github.io}}$.
PRM-RL: Long-range Robotic Navigation Tasks by Combining Reinforcement Learning and Sampling-based Planning
May 16, 2018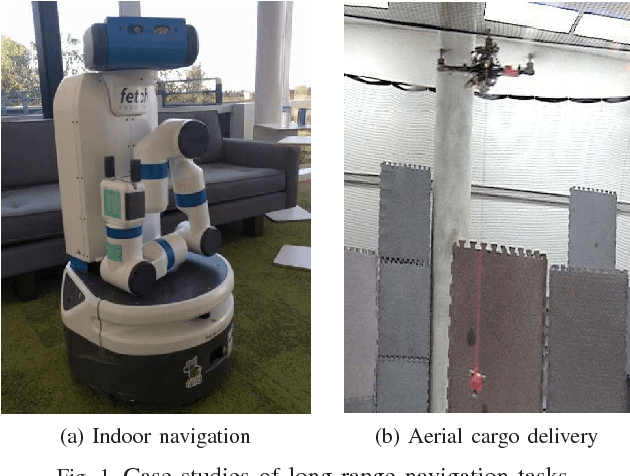
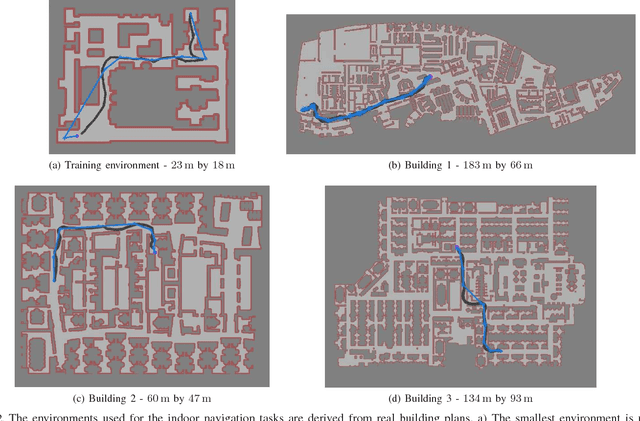
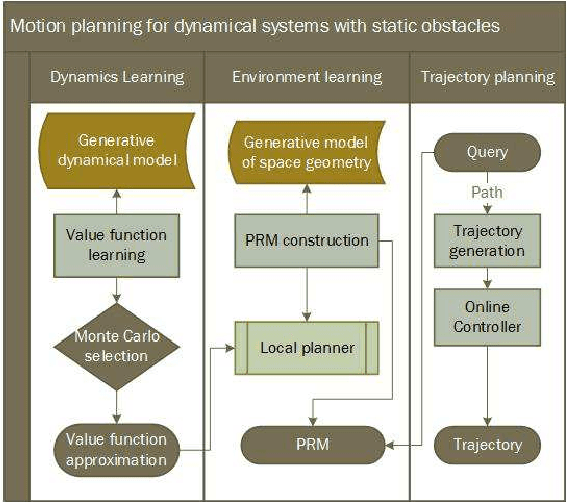
We present PRM-RL, a hierarchical method for long-range navigation task completion that combines sampling based path planning with reinforcement learning (RL). The RL agents learn short-range, point-to-point navigation policies that capture robot dynamics and task constraints without knowledge of the large-scale topology. Next, the sampling-based planners provide roadmaps which connect robot configurations that can be successfully navigated by the RL agent. The same RL agents are used to control the robot under the direction of the planning, enabling long-range navigation. We use the Probabilistic Roadmaps (PRMs) for the sampling-based planner. The RL agents are constructed using feature-based and deep neural net policies in continuous state and action spaces. We evaluate PRM-RL, both in simulation and on-robot, on two navigation tasks with non-trivial robot dynamics: end-to-end differential drive indoor navigation in office environments, and aerial cargo delivery in urban environments with load displacement constraints. Our results show improvement in task completion over both RL agents on their own and traditional sampling-based planners. In the indoor navigation task, PRM-RL successfully completes up to 215 m long trajectories under noisy sensor conditions, and the aerial cargo delivery completes flights over 1000 m without violating the task constraints in an environment 63 million times larger than used in training.
* 9 pages, 7 figures