 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnboard MuJoCo-based Model Predictive Control for Shipboard Crane with Double-Pendulum Sway Suppression
Mar 17, 2026Transferring heavy payloads in maritime settings relies on efficient crane operation, limited by hazardous double-pendulum payload sway. This sway motion is further exacerbated in offshore environments by external perturbations from wind and ocean waves. Manual suppression of these oscillations on an underactuated crane system by human operators is challenging. Existing control methods struggle in such settings, often relying on simplified analytical models, while deep reinforcement learning (RL) approaches tend to generalise poorly to unseen conditions. Deploying a predictive controller onto compute-constrained, highly non-linear physical systems without relying on extensive offline training or complex analytical models remains a significant challenge. Here we show a complete real-time control pipeline centered on the MuJoCo MPC framework that leverages a cross-entropy method planner to evaluate candidate action sequences directly within a physics simulator. By using simulated rollouts, this sampling-based approach successfully reconciles the conflicting objectives of dynamic target tracking and sway damping without relying on complex analytical models. We demonstrate that the controller can run effectively on a resource-constrained embedded hardware, while outperforming traditional PID and RL baselines in counteracting external base perturbations. Furthermore, our system demonstrates robustness even when subjected to unmodeled physical discrepancies like the introduction of a second payload.
Learning a Thousand Tasks in a Day
Nov 13, 2025Humans are remarkably efficient at learning tasks from demonstrations, but today's imitation learning methods for robot manipulation often require hundreds or thousands of demonstrations per task. We investigate two fundamental priors for improving learning efficiency: decomposing manipulation trajectories into sequential alignment and interaction phases, and retrieval-based generalisation. Through 3,450 real-world rollouts, we systematically study this decomposition. We compare different design choices for the alignment and interaction phases, and examine generalisation and scaling trends relative to today's dominant paradigm of behavioural cloning with a single-phase monolithic policy. In the few-demonstrations-per-task regime (<10 demonstrations), decomposition achieves an order of magnitude improvement in data efficiency over single-phase learning, with retrieval consistently outperforming behavioural cloning for both alignment and interaction. Building on these insights, we develop Multi-Task Trajectory Transfer (MT3), an imitation learning method based on decomposition and retrieval. MT3 learns everyday manipulation tasks from as little as a single demonstration each, whilst also generalising to novel object instances. This efficiency enables us to teach a robot 1,000 distinct everyday tasks in under 24 hours of human demonstrator time. Through 2,200 additional real-world rollouts, we reveal MT3's capabilities and limitations across different task families. Videos of our experiments can be found on at https://www.robot-learning.uk/learning-1000-tasks.
* This is the author's version of the work. It is posted here by permission of the AAAS for personal use, not for redistribution. The definitive version was published in Science Robotics on 12 November 2025, DOI: https://www.science.org/doi/10.1126/scirobotics.adv7594. Link to project website: https://www.robot-learning.uk/learning-1000-tasks
Adapting Skills to Novel Grasps: A Self-Supervised Approach
Jul 31, 2024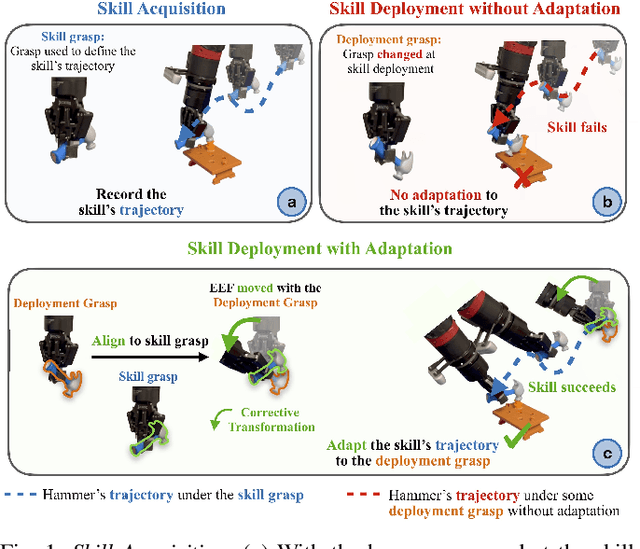
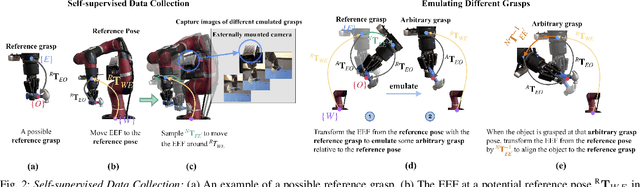
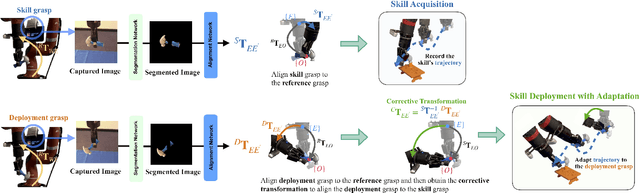
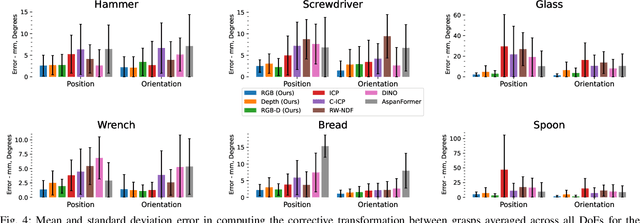
In this paper, we study the problem of adapting manipulation trajectories involving grasped objects (e.g. tools) defined for a single grasp pose to novel grasp poses. A common approach to address this is to define a new trajectory for each possible grasp explicitly, but this is highly inefficient. Instead, we propose a method to adapt such trajectories directly while only requiring a period of self-supervised data collection, during which a camera observes the robot's end-effector moving with the object rigidly grasped. Importantly, our method requires no prior knowledge of the grasped object (such as a 3D CAD model), it can work with RGB images, depth images, or both, and it requires no camera calibration. Through a series of real-world experiments involving 1360 evaluations, we find that self-supervised RGB data consistently outperforms alternatives that rely on depth images including several state-of-the-art pose estimation methods. Compared to the best-performing baseline, our method results in an average of 28.5% higher success rate when adapting manipulation trajectories to novel grasps on several everyday tasks. Videos of the experiments are available on our webpage at https://www.robot-learning.uk/adapting-skills
One-Shot Imitation Learning: A Pose Estimation Perspective
Oct 18, 2023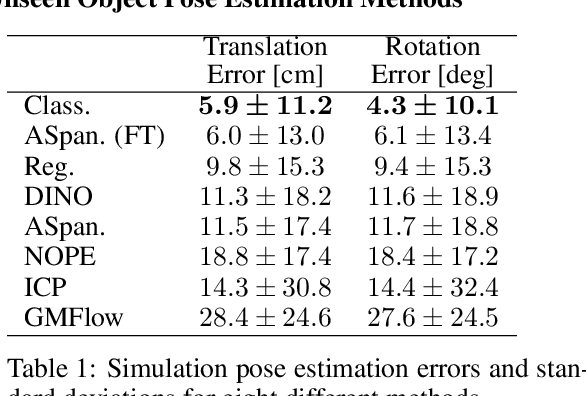
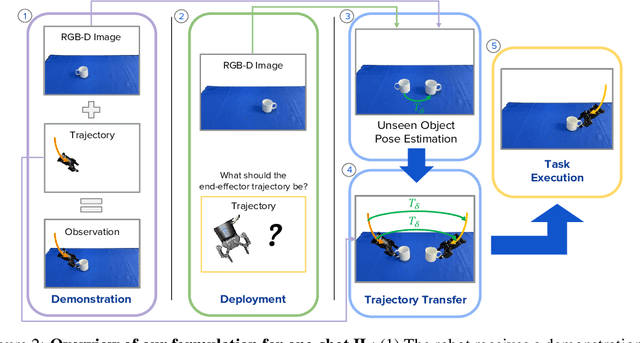
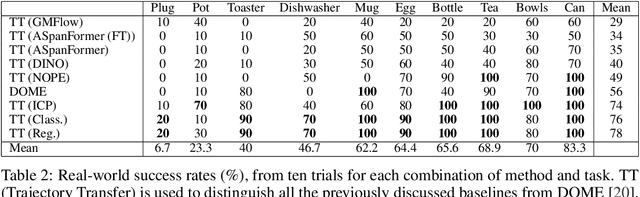

In this paper, we study imitation learning under the challenging setting of: (1) only a single demonstration, (2) no further data collection, and (3) no prior task or object knowledge. We show how, with these constraints, imitation learning can be formulated as a combination of trajectory transfer and unseen object pose estimation. To explore this idea, we provide an in-depth study on how state-of-the-art unseen object pose estimators perform for one-shot imitation learning on ten real-world tasks, and we take a deep dive into the effects that camera calibration, pose estimation error, and spatial generalisation have on task success rates. For videos, please visit https://www.robot-learning.uk/pose-estimation-perspective.
Framework and Benchmarks for Combinatorial and Mixed-variable Bayesian Optimization
Jun 16, 2023This paper introduces a modular framework for Mixed-variable and Combinatorial Bayesian Optimization (MCBO) to address the lack of systematic benchmarking and standardized evaluation in the field. Current MCBO papers often introduce non-diverse or non-standard benchmarks to evaluate their methods, impeding the proper assessment of different MCBO primitives and their combinations. Additionally, papers introducing a solution for a single MCBO primitive often omit benchmarking against baselines that utilize the same methods for the remaining primitives. This omission is primarily due to the significant implementation overhead involved, resulting in a lack of controlled assessments and an inability to showcase the merits of a contribution effectively. To overcome these challenges, our proposed framework enables an effortless combination of Bayesian Optimization components, and provides a diverse set of synthetic and real-world benchmarking tasks. Leveraging this flexibility, we implement 47 novel MCBO algorithms and benchmark them against seven existing MCBO solvers and five standard black-box optimization algorithms on ten tasks, conducting over 4000 experiments. Our findings reveal a superior combination of MCBO primitives outperforming existing approaches and illustrate the significance of model fit and the use of a trust region. We make our MCBO library available under the MIT license at \url{https://github.com/huawei-noah/HEBO/tree/master/MCBO}.
AntBO: Towards Real-World Automated Antibody Design with Combinatorial Bayesian Optimisation
Feb 16, 2022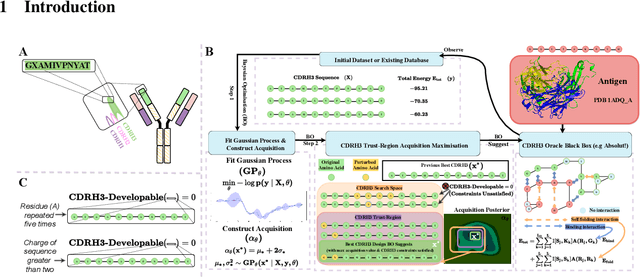
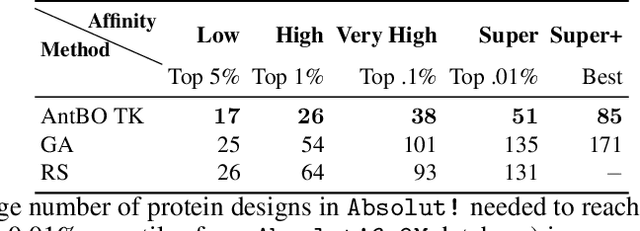
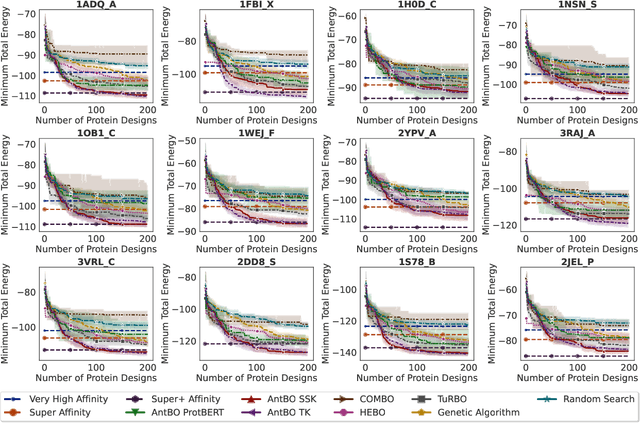
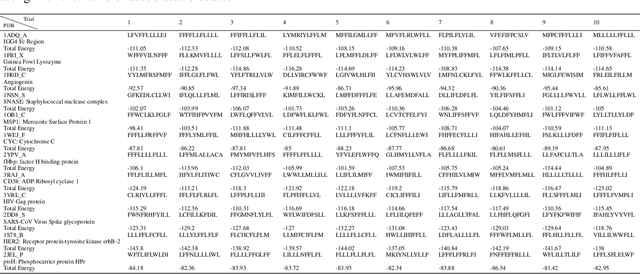
Antibodies are canonically Y-shaped multimeric proteins capable of highly specific molecular recognition. The CDRH3 region located at the tip of variable chains of an antibody dominates antigen-binding specificity. Therefore, it is a priority to design optimal antigen-specific CDRH3 regions to develop therapeutic antibodies to combat harmful pathogens. However, the combinatorial nature of CDRH3 sequence space makes it impossible to search for an optimal binding sequence exhaustively and efficiently, especially not experimentally. Here, we present AntBO: a Combinatorial Bayesian Optimisation framework enabling efficient in silico design of the CDRH3 region. Ideally, antibodies should bind to their target antigen and be free from any harmful outcomes. Therefore, we introduce the CDRH3 trust region that restricts the search to sequences with feasible developability scores. To benchmark AntBO, we use the Absolut! software suite as a black-box oracle because it can score the target specificity and affinity of designed antibodies in silico in an unconstrained fashion. The results across 188 antigens demonstrate the benefit of AntBO in designing CDRH3 regions with diverse biophysical properties. In under 200 protein designs, AntBO can suggest antibody sequences that outperform the best binding sequence drawn from 6.9 million experimentally obtained CDRH3s and a commonly used genetic algorithm baseline. Additionally, AntBO finds very-high affinity CDRH3 sequences in only 38 protein designs whilst requiring no domain knowledge. We conclude AntBO brings automated antibody design methods closer to what is practically viable for in vitro experimentation.
Learning Eye-in-Hand Camera Calibration from a Single Image
Nov 03, 2021
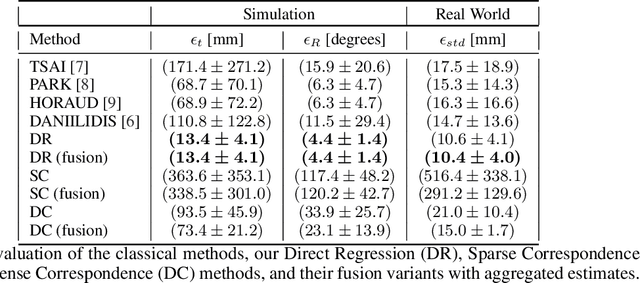
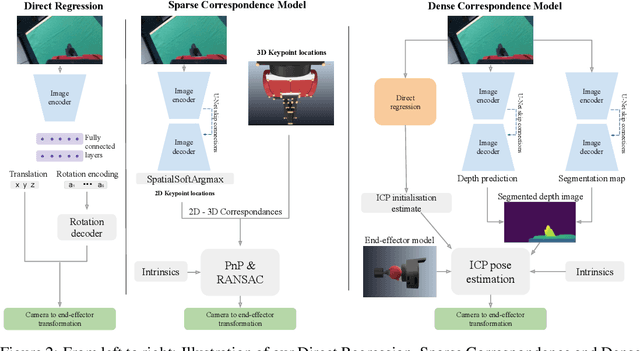
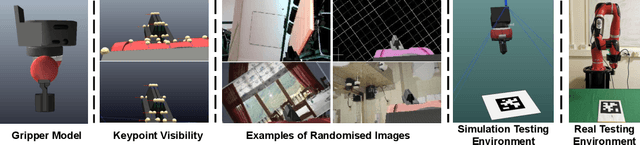
Eye-in-hand camera calibration is a fundamental and long-studied problem in robotics. We present a study on using learning-based methods for solving this problem online from a single RGB image, whilst training our models with entirely synthetic data. We study three main approaches: one direct regression model that directly predicts the extrinsic matrix from an image, one sparse correspondence model that regresses 2D keypoints and then uses PnP, and one dense correspondence model that uses regressed depth and segmentation maps to enable ICP pose estimation. In our experiments, we benchmark these methods against each other and against well-established classical methods, to find the surprising result that direct regression outperforms other approaches, and we perform noise-sensitivity analysis to gain further insights into these results.
Hybrid ICP
Sep 15, 2021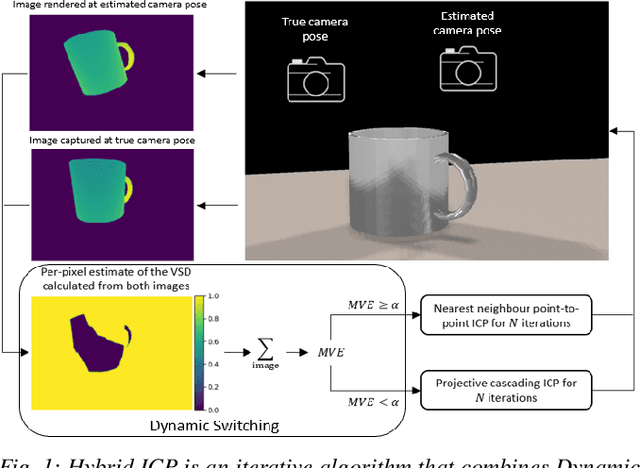

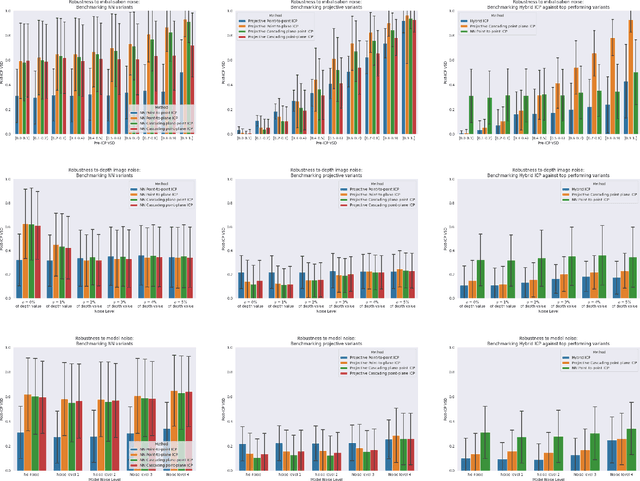

ICP algorithms typically involve a fixed choice of data association method and a fixed choice of error metric. In this paper, we propose Hybrid ICP, a novel and flexible ICP variant which dynamically optimises both the data association method and error metric based on the live image of an object and the current ICP estimate. We show that when used for object pose estimation, Hybrid ICP is more accurate and more robust to noise than other commonly used ICP variants. We also consider the setting where ICP is applied sequentially with a moving camera, and we study the trade-off between the accuracy of each ICP estimate and the number of ICP estimates available within a fixed amount of time.