Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOne-Shot Imitation Learning: A Pose Estimation Perspective
Paper and Code
Oct 18, 2023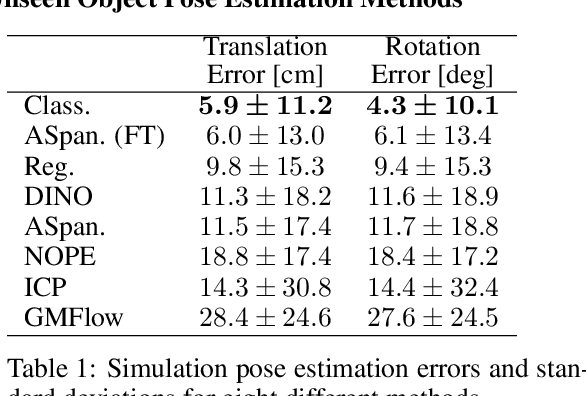
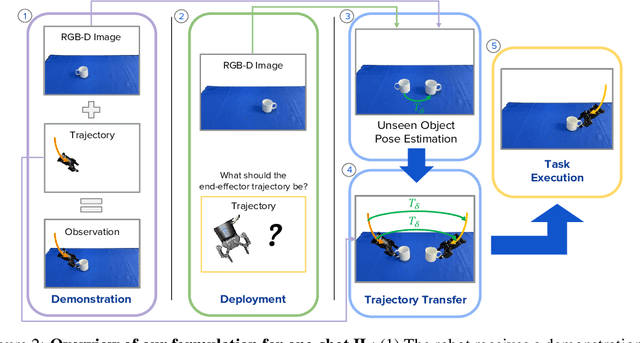
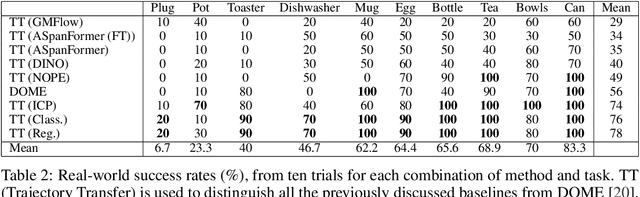

In this paper, we study imitation learning under the challenging setting of: (1) only a single demonstration, (2) no further data collection, and (3) no prior task or object knowledge. We show how, with these constraints, imitation learning can be formulated as a combination of trajectory transfer and unseen object pose estimation. To explore this idea, we provide an in-depth study on how state-of-the-art unseen object pose estimators perform for one-shot imitation learning on ten real-world tasks, and we take a deep dive into the effects that camera calibration, pose estimation error, and spatial generalisation have on task success rates. For videos, please visit https://www.robot-learning.uk/pose-estimation-perspective.
* Published at the 7th Conference on Robot Learning (CoRL 2023). For
more details please visit
https://www.robot-learning.uk/pose-estimation-perspective
View paper on
 OpenReview
OpenReview