 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Eye-in-Hand Camera Calibration from a Single Image
Paper and Code
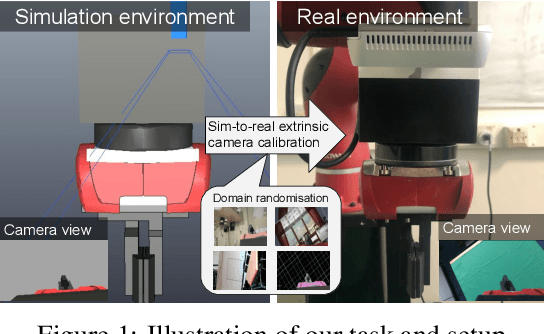
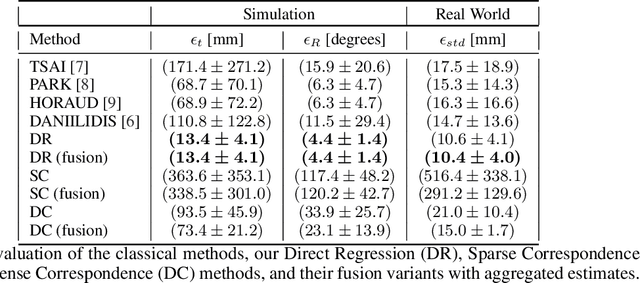
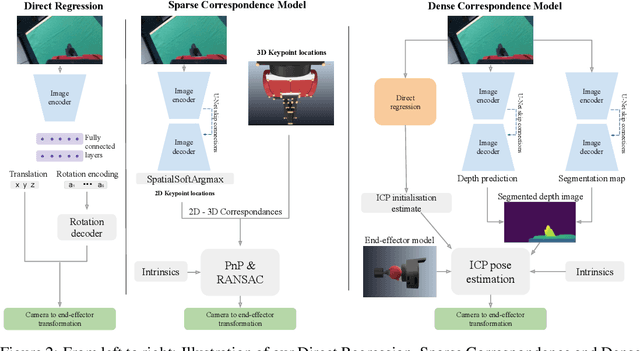
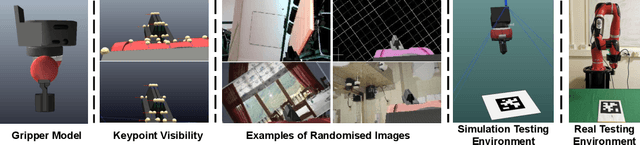
Eye-in-hand camera calibration is a fundamental and long-studied problem in robotics. We present a study on using learning-based methods for solving this problem online from a single RGB image, whilst training our models with entirely synthetic data. We study three main approaches: one direct regression model that directly predicts the extrinsic matrix from an image, one sparse correspondence model that regresses 2D keypoints and then uses PnP, and one dense correspondence model that uses regressed depth and segmentation maps to enable ICP pose estimation. In our experiments, we benchmark these methods against each other and against well-established classical methods, to find the surprising result that direct regression outperforms other approaches, and we perform noise-sensitivity analysis to gain further insights into these results.