 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePaliGemma: A versatile 3B VLM for transfer
Jul 10, 2024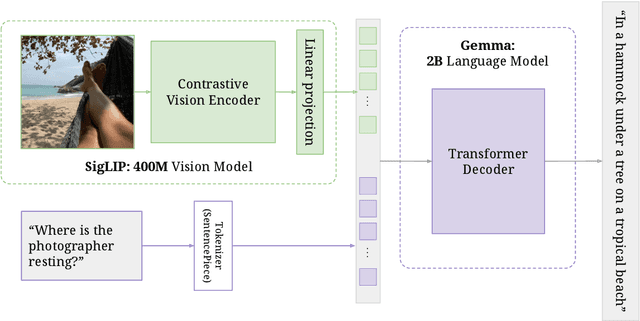
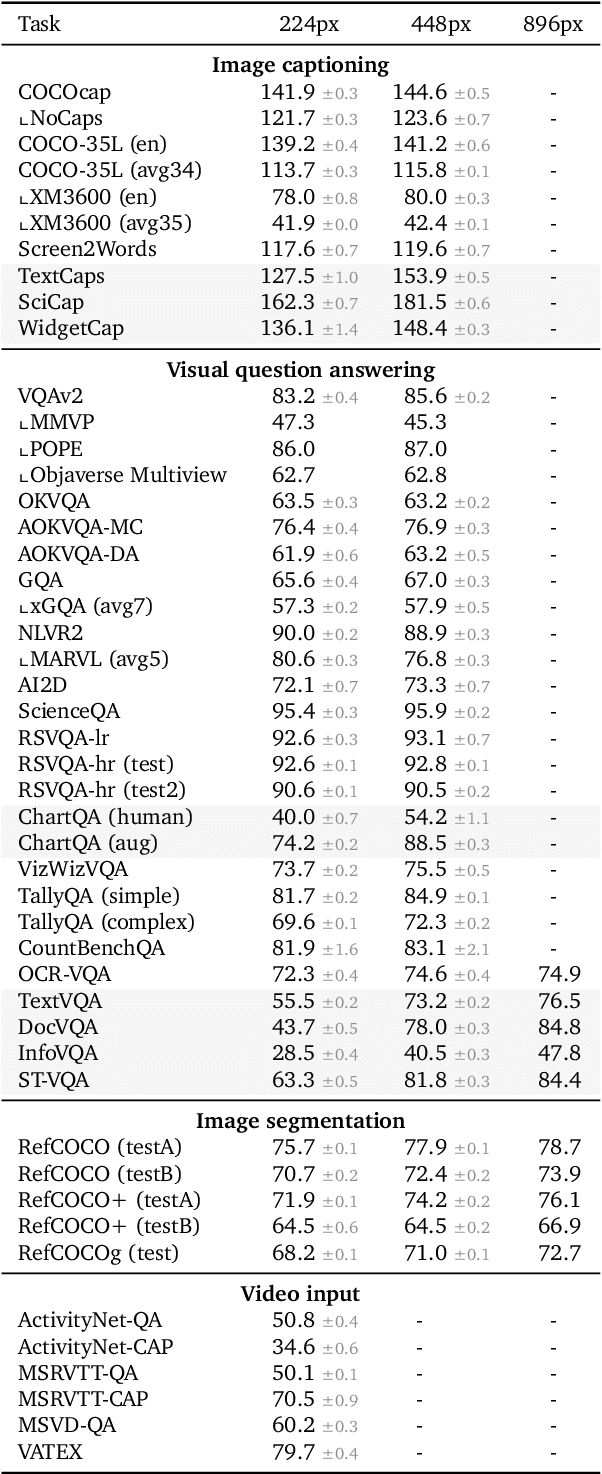
PaliGemma is an open Vision-Language Model (VLM) that is based on the SigLIP-So400m vision encoder and the Gemma-2B language model. It is trained to be a versatile and broadly knowledgeable base model that is effective to transfer. It achieves strong performance on a wide variety of open-world tasks. We evaluate PaliGemma on almost 40 diverse tasks including standard VLM benchmarks, but also more specialized tasks such as remote-sensing and segmentation.
Routers in Vision Mixture of Experts: An Empirical Study
Jan 29, 2024Mixture-of-Experts (MoE) models are a promising way to scale up model capacity without significantly increasing computational cost. A key component of MoEs is the router, which decides which subset of parameters (experts) process which feature embeddings (tokens). In this paper, we present a comprehensive study of routers in MoEs for computer vision tasks. We introduce a unified MoE formulation that subsumes different MoEs with two parametric routing tensors. This formulation covers both sparse MoE, which uses a binary or hard assignment between experts and tokens, and soft MoE, which uses a soft assignment between experts and weighted combinations of tokens. Routers for sparse MoEs can be further grouped into two variants: Token Choice, which matches experts to each token, and Expert Choice, which matches tokens to each expert. We conduct head-to-head experiments with 6 different routers, including existing routers from prior work and new ones we introduce. We show that (i) many routers originally developed for language modeling can be adapted to perform strongly in vision tasks, (ii) in sparse MoE, Expert Choice routers generally outperform Token Choice routers, and (iii) soft MoEs generally outperform sparse MoEs with a fixed compute budget. These results provide new insights regarding the crucial role of routers in vision MoE models.
From Sparse to Soft Mixtures of Experts
Aug 02, 2023Sparse mixture of expert architectures (MoEs) scale model capacity without large increases in training or inference costs. Despite their success, MoEs suffer from a number of issues: training instability, token dropping, inability to scale the number of experts, or ineffective finetuning. In this work, we proposeSoft MoE, a fully-differentiable sparse Transformer that addresses these challenges, while maintaining the benefits of MoEs. Soft MoE performs an implicit soft assignment by passing different weighted combinations of all input tokens to each expert. As in other MoE works, experts in Soft MoE only process a subset of the (combined) tokens, enabling larger model capacity at lower inference cost. In the context of visual recognition, Soft MoE greatly outperforms standard Transformers (ViTs) and popular MoE variants (Tokens Choice and Experts Choice). For example, Soft MoE-Base/16 requires 10.5x lower inference cost (5.7x lower wall-clock time) than ViT-Huge/14 while matching its performance after similar training. Soft MoE also scales well: Soft MoE Huge/14 with 128 experts in 16 MoE layers has over 40x more parameters than ViT Huge/14, while inference time cost grows by only 2%, and it performs substantially better.
Patch n' Pack: NaViT, a Vision Transformer for any Aspect Ratio and Resolution
Jul 12, 2023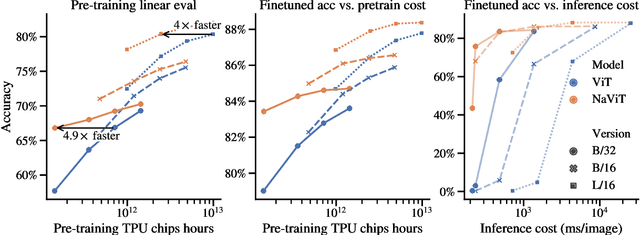
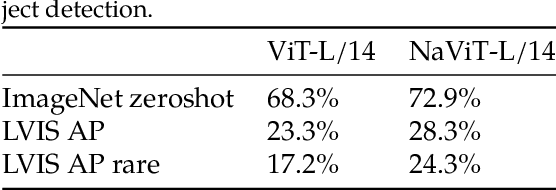
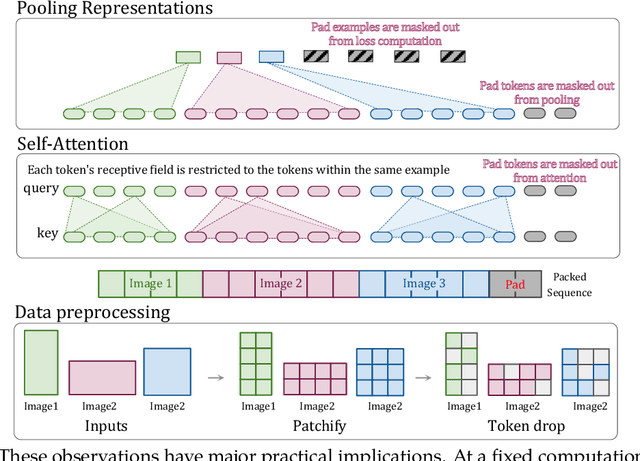
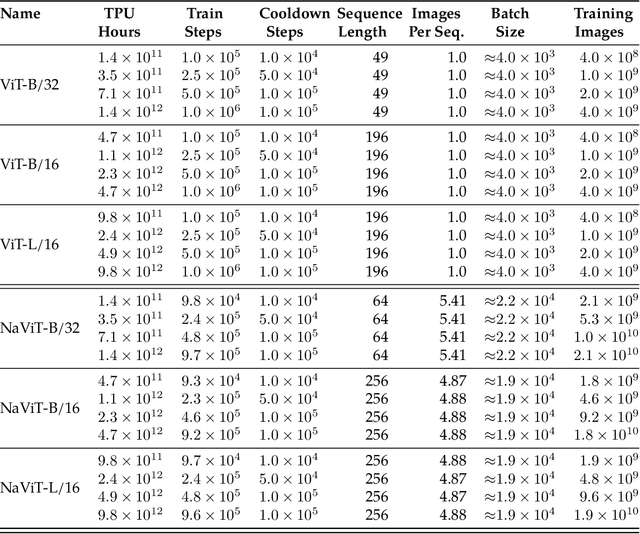
The ubiquitous and demonstrably suboptimal choice of resizing images to a fixed resolution before processing them with computer vision models has not yet been successfully challenged. However, models such as the Vision Transformer (ViT) offer flexible sequence-based modeling, and hence varying input sequence lengths. We take advantage of this with NaViT (Native Resolution ViT) which uses sequence packing during training to process inputs of arbitrary resolutions and aspect ratios. Alongside flexible model usage, we demonstrate improved training efficiency for large-scale supervised and contrastive image-text pretraining. NaViT can be efficiently transferred to standard tasks such as image and video classification, object detection, and semantic segmentation and leads to improved results on robustness and fairness benchmarks. At inference time, the input resolution flexibility can be used to smoothly navigate the test-time cost-performance trade-off. We believe that NaViT marks a departure from the standard, CNN-designed, input and modelling pipeline used by most computer vision models, and represents a promising direction for ViTs.
Scaling Vision Transformers to 22 Billion Parameters
Feb 10, 2023



The scaling of Transformers has driven breakthrough capabilities for language models. At present, the largest large language models (LLMs) contain upwards of 100B parameters. Vision Transformers (ViT) have introduced the same architecture to image and video modelling, but these have not yet been successfully scaled to nearly the same degree; the largest dense ViT contains 4B parameters (Chen et al., 2022). We present a recipe for highly efficient and stable training of a 22B-parameter ViT (ViT-22B) and perform a wide variety of experiments on the resulting model. When evaluated on downstream tasks (often with a lightweight linear model on frozen features), ViT-22B demonstrates increasing performance with scale. We further observe other interesting benefits of scale, including an improved tradeoff between fairness and performance, state-of-the-art alignment to human visual perception in terms of shape/texture bias, and improved robustness. ViT-22B demonstrates the potential for "LLM-like" scaling in vision, and provides key steps towards getting there.
Fast, Differentiable and Sparse Top-k: a Convex Analysis Perspective
Feb 06, 2023



The top-k operator returns a k-sparse vector, where the non-zero values correspond to the k largest values of the input. Unfortunately, because it is a discontinuous function, it is difficult to incorporate in neural networks trained end-to-end with backpropagation. Recent works have considered differentiable relaxations, based either on regularization or perturbation techniques. However, to date, no approach is fully differentiable and sparse. In this paper, we propose new differentiable and sparse top-k operators. We view the top-k operator as a linear program over the permutahedron, the convex hull of permutations. We then introduce a p-norm regularization term to smooth out the operator, and show that its computation can be reduced to isotonic optimization. Our framework is significantly more general than the existing one and allows for example to express top-k operators that select values in magnitude. On the algorithmic side, in addition to pool adjacent violator (PAV) algorithms, we propose a new GPU/TPU-friendly Dykstra algorithm to solve isotonic optimization problems. We successfully use our operators to prune weights in neural networks, to fine-tune vision transformers, and as a router in sparse mixture of experts.
Sparse Upcycling: Training Mixture-of-Experts from Dense Checkpoints
Dec 09, 2022



Training large, deep neural networks to convergence can be prohibitively expensive. As a result, often only a small selection of popular, dense models are reused across different contexts and tasks. Increasingly, sparsely activated models, which seek to decouple model size from computation costs, are becoming an attractive alternative to dense models. Although more efficient in terms of quality and computation cost, sparse models remain data-hungry and costly to train from scratch in the large scale regime. In this work, we propose sparse upcycling -- a simple way to reuse sunk training costs by initializing a sparsely activated Mixture-of-Experts model from a dense checkpoint. We show that sparsely upcycled T5 Base, Large, and XL language models and Vision Transformer Base and Large models, respectively, significantly outperform their dense counterparts on SuperGLUE and ImageNet, using only ~50% of the initial dense pretraining sunk cost. The upcycled models also outperform sparse models trained from scratch on 100% of the initial dense pretraining computation budget.
On the Adversarial Robustness of Mixture of Experts
Oct 19, 2022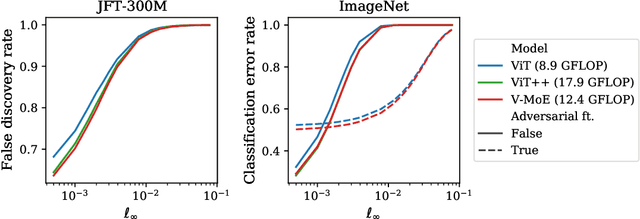
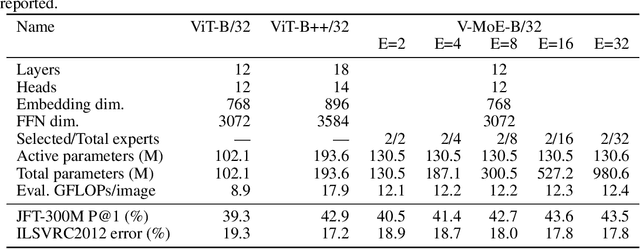
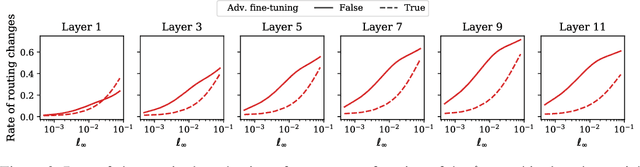
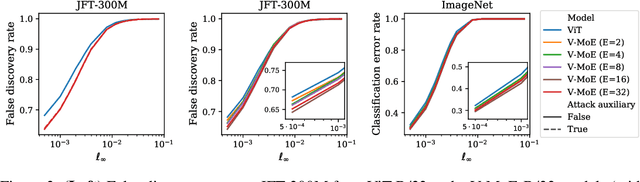
Adversarial robustness is a key desirable property of neural networks. It has been empirically shown to be affected by their sizes, with larger networks being typically more robust. Recently, Bubeck and Sellke proved a lower bound on the Lipschitz constant of functions that fit the training data in terms of their number of parameters. This raises an interesting open question, do -- and can -- functions with more parameters, but not necessarily more computational cost, have better robustness? We study this question for sparse Mixture of Expert models (MoEs), that make it possible to scale up the model size for a roughly constant computational cost. We theoretically show that under certain conditions on the routing and the structure of the data, MoEs can have significantly smaller Lipschitz constants than their dense counterparts. The robustness of MoEs can suffer when the highest weighted experts for an input implement sufficiently different functions. We next empirically evaluate the robustness of MoEs on ImageNet using adversarial attacks and show they are indeed more robust than dense models with the same computational cost. We make key observations showing the robustness of MoEs to the choice of experts, highlighting the redundancy of experts in models trained in practice.
Sparsity-Constrained Optimal Transport
Sep 30, 2022



Regularized optimal transport (OT) is now increasingly used as a loss or as a matching layer in neural networks. Entropy-regularized OT can be computed using the Sinkhorn algorithm but it leads to fully-dense transportation plans, meaning that all sources are (fractionally) matched with all targets. To address this issue, several works have investigated quadratic regularization instead. This regularization preserves sparsity and leads to unconstrained and smooth (semi) dual objectives, that can be solved with off-the-shelf gradient methods. Unfortunately, quadratic regularization does not give direct control over the cardinality (number of nonzeros) of the transportation plan. We propose in this paper a new approach for OT with explicit cardinality constraints on the transportation plan. Our work is motivated by an application to sparse mixture of experts, where OT can be used to match input tokens such as image patches with expert models such as neural networks. Cardinality constraints ensure that at most $k$ tokens are matched with an expert, which is crucial for computational performance reasons. Despite the nonconvexity of cardinality constraints, we show that the corresponding (semi) dual problems are tractable and can be solved with first-order gradient methods. Our method can be thought as a middle ground between unregularized OT (recovered in the limit case $k=1$) and quadratically-regularized OT (recovered when $k$ is large enough). The smoothness of the objectives increases as $k$ increases, giving rise to a trade-off between convergence speed and sparsity of the optimal plan.
PaLI: A Jointly-Scaled Multilingual Language-Image Model
Sep 16, 2022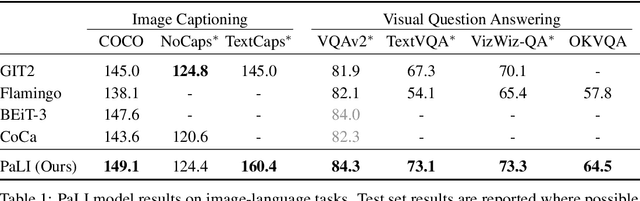
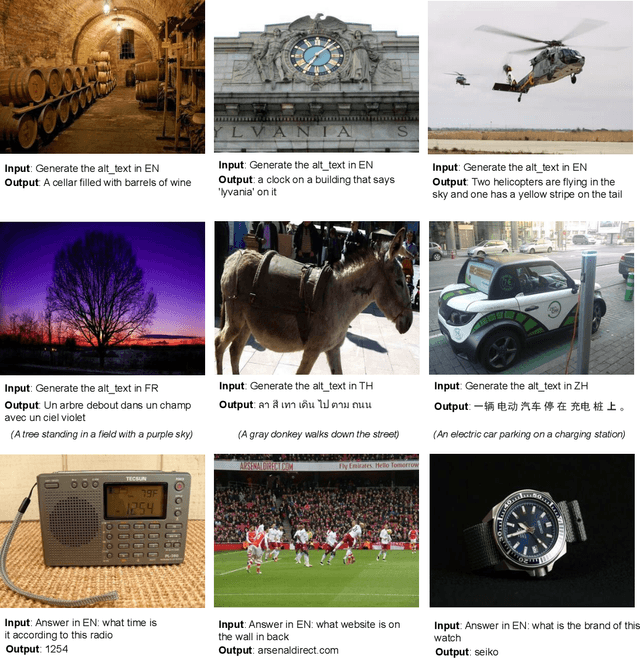
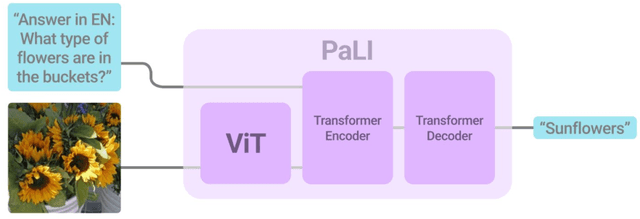

Effective scaling and a flexible task interface enable large language models to excel at many tasks. PaLI (Pathways Language and Image model) extends this approach to the joint modeling of language and vision. PaLI generates text based on visual and textual inputs, and with this interface performs many vision, language, and multimodal tasks, in many languages. To train PaLI, we make use of large pretrained encoder-decoder language models and Vision Transformers (ViTs). This allows us to capitalize on their existing capabilities and leverage the substantial cost of training them. We find that joint scaling of the vision and language components is important. Since existing Transformers for language are much larger than their vision counterparts, we train the largest ViT to date (ViT-e) to quantify the benefits from even larger-capacity vision models. To train PaLI, we create a large multilingual mix of pretraining tasks, based on a new image-text training set containing 10B images and texts in over 100 languages. PaLI achieves state-of-the-art in multiple vision and language tasks (such as captioning, visual question-answering, scene-text understanding), while retaining a simple, modular, and scalable design.