 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAIstorian lets AI be a historian: A KG-powered multi-agent system for accurate biography generation
Mar 14, 2025Huawei has always been committed to exploring the AI application in historical research. Biography generation, as a specialized form of abstractive summarization, plays a crucial role in historical research but faces unique challenges that existing large language models (LLMs) struggle to address. These challenges include maintaining stylistic adherence to historical writing conventions, ensuring factual fidelity, and handling fragmented information across multiple documents. We present AIstorian, a novel end-to-end agentic system featured with a knowledge graph (KG)-powered retrieval-augmented generation (RAG) and anti-hallucination multi-agents. Specifically, AIstorian introduces an in-context learning based chunking strategy and a KG-based index for accurate and efficient reference retrieval. Meanwhile, AIstorian orchestrates multi-agents to conduct on-the-fly hallucination detection and error-type-aware correction. Additionally, to teach LLMs a certain language style, we finetune LLMs based on a two-step training approach combining data augmentation-enhanced supervised fine-tuning with stylistic preference optimization. Extensive experiments on a real-life historical Jinshi dataset demonstrate that AIstorian achieves a 3.8x improvement in factual accuracy and a 47.6% reduction in hallucination rate compared to existing baselines. The data and code are available at: https://github.com/ZJU-DAILY/AIstorian.
MSE-Based Transceiver Designs for RIS-Aided Communications With Hardware Impairments
Aug 16, 2022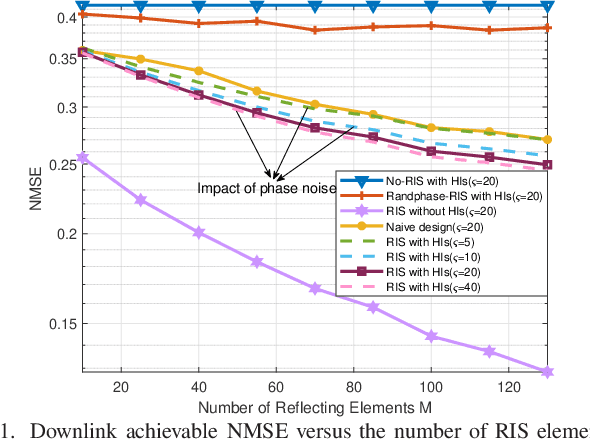
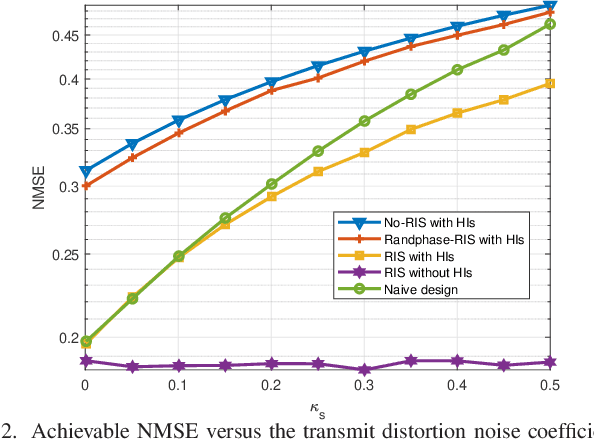
It is challenging to precisely configure the phase shifts of the reflecting elements at the reconfigurable intelligent surface (RIS) due to inherent hardware impairments (HIs). In this paper, the mean square error (MSE) performance is investigated in an RIS-aided single-user multiple-input multipleoutput (MIMO) communication system with transceiver HIs and RIS phase noise. We aim to jointly optimize the transmit precoder, linear received equalizer, and RIS reflecting matrices to minimize the MSE. To tackle this problem, an iterative algorithm is proposed, wherein the beamforming matrices are alternately optimized. Specifically, for the beamforming optimization subproblem, we derive the closed-form expression of the optimal precoder and equalizer matrices. Then, for the phase shift optimization subproblem, an efficient algorithm based on the majorization-minimization (MM) method is proposed. Simulation results show that the proposed MSE-based RIS-aided transceiver scheme dramatically outperforms the conventional system algorithms that do not consider HIs at both the transceiver and the RIS.
* Accepted by IEEE Communications Letters
Hierarchical Motion Encoder-Decoder Network for Trajectory Forecasting
Nov 26, 2021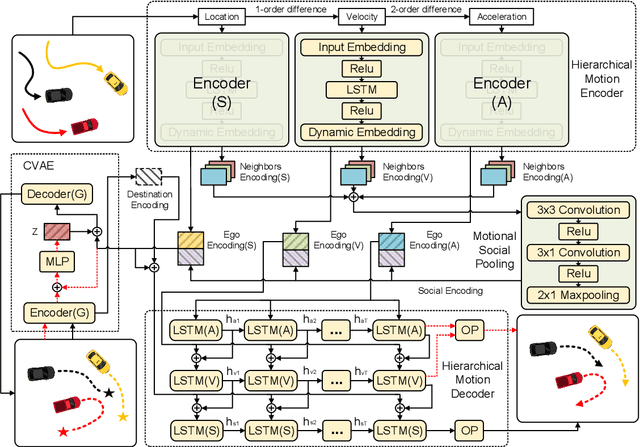
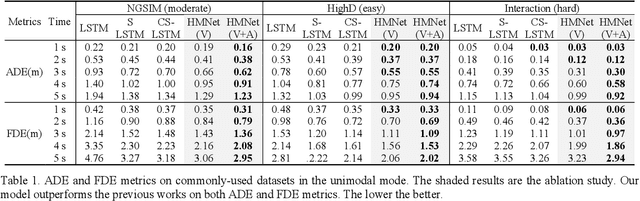
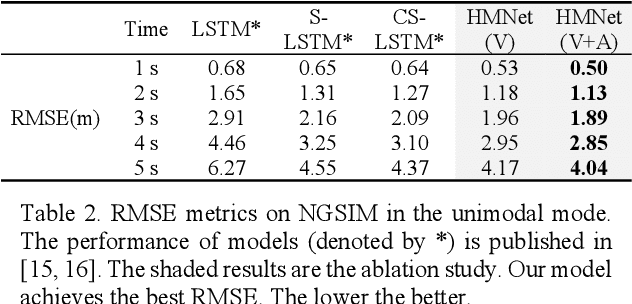
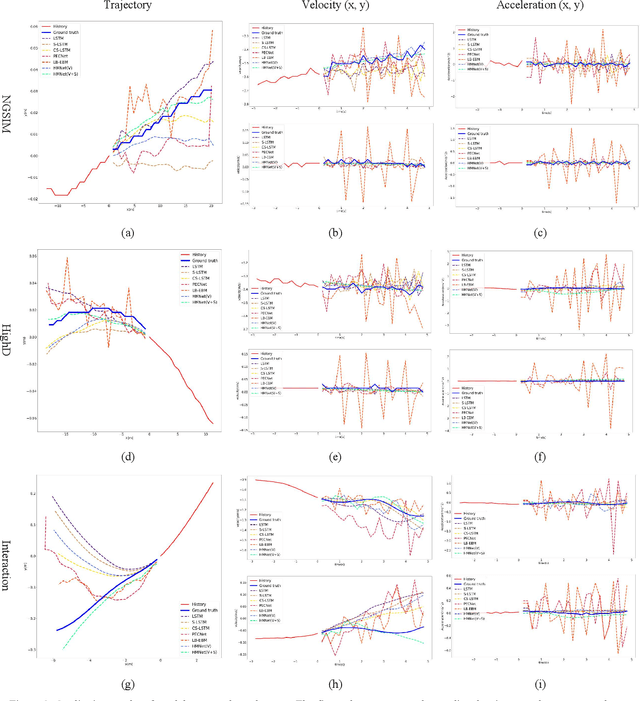
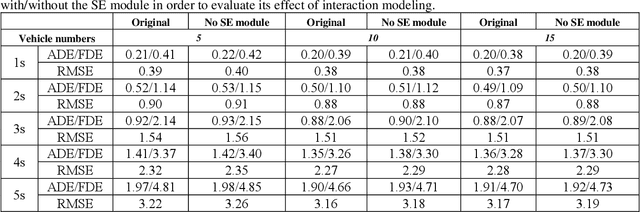
Trajectory forecasting plays a pivotal role in the field of intelligent vehicles or social robots. Recent works focus on modeling spatial social impacts or temporal motion attentions, but neglect inherent properties of motions, i.e. moving trends and driving intentions. This paper proposes a context-free Hierarchical Motion Encoder-Decoder Network (HMNet) for vehicle trajectory prediction. HMNet first infers the hierarchical difference on motions to encode physically compliant patterns with high expressivity of moving trends and driving intentions. Then, a goal (endpoint)-embedded decoder hierarchically constructs multimodal predictions depending on the location-velocity-acceleration-related patterns. Besides, we present a modified social pooling module which considers certain motion properties to represent social interactions. HMNet enables to make the accurate, unimodal/multimodal and physically-socially-compliant prediction. Experiments on three public trajectory prediction datasets, i.e. NGSIM, HighD and Interaction show that our model achieves the state-of-the-art performance both quantitatively and qualitatively. We will release our code here: https://github.com/xuedashuai/HMNet.
Energy Efficient Reconfigurable Intelligent Surface Enabled Mobile Edge Computing Networks with NOMA
Apr 30, 2021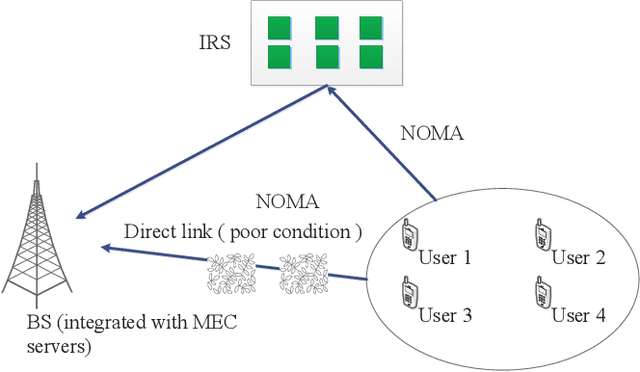
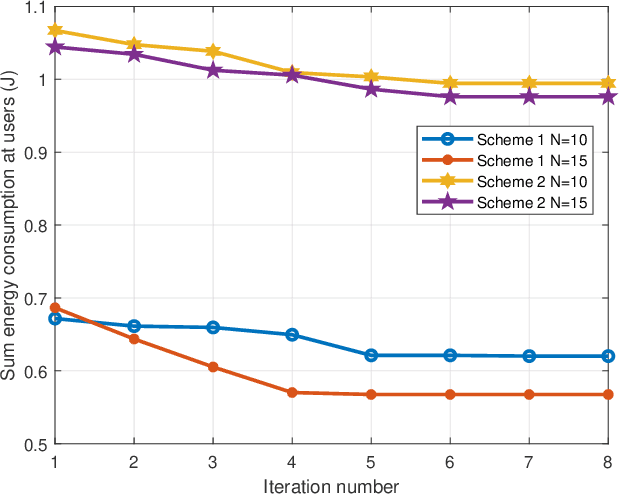
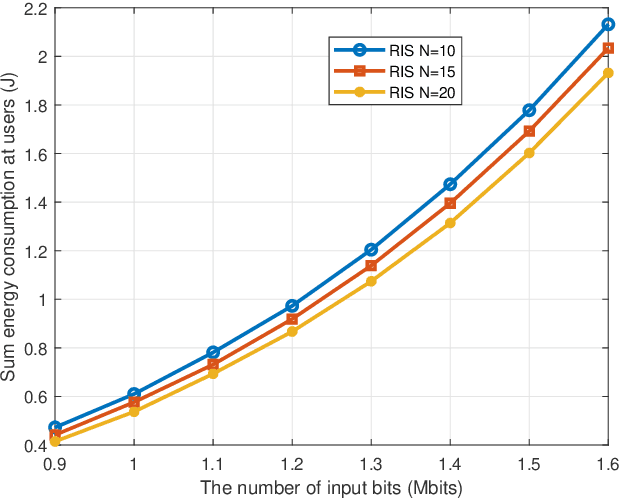
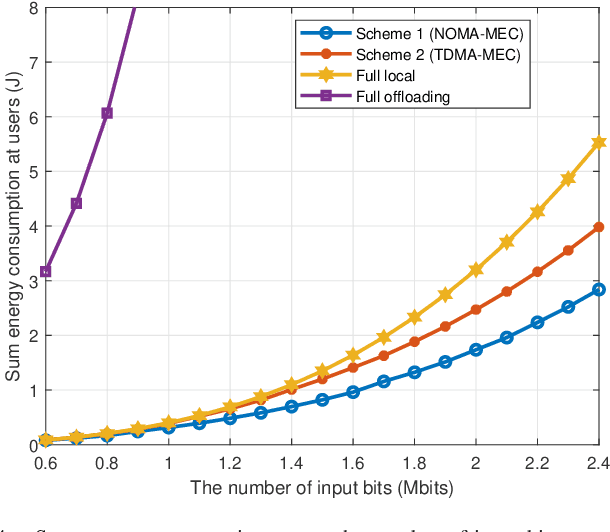
Reconfigurable intelligent surface (RIS) has emerged as a promising technology for achieving high spectrum and energy efficiency in future wireless communication networks. In this paper, we investigate an RIS-aided single-cell multi-user mobile edge computing (MEC) system where an RIS is deployed to support the communication between a base station (BS) equipped with MEC servers and multiple single-antenna users. To utilize the scarce frequency resource efficiently, we assume that users communicate with BS based on a non-orthogonal multiple access (NOMA) protocol. Each user has a computation task which can be computed locally or partially/fully offloaded to the BS. We aim to minimize the sum energy consumption of all users by jointly optimizing the passive phase shifters, the size of transmission data, transmission rate, power control, transmission time and the decoding order. Since the resulting problem is non-convex, we use the block coordinate descent method to alternately optimize two separated subproblems. More specifically, we use the dual method to tackle a subproblem with given phase shift and obtain the closed-form solution; and then we utilize penalty method to solve another subproblem for given power control. Moreover, in order to demonstrate the effectiveness of our proposed algorithm, we propose three benchmark schemes: the time-division multiple access (TDMA)-MEC scheme, the full local computing scheme and the full offloading scheme. We use an alternating 1-D search method and the dual method that can solve the TDMA-based transmission problem well. Numerical results demonstrate that the proposed scheme can increase the energy efficiency and achieve significant performance gains over the three benchmark schemes.
Deep Kalman Filter: A Refinement Module for the Rollout Trajectory Prediction Methods
Feb 22, 2021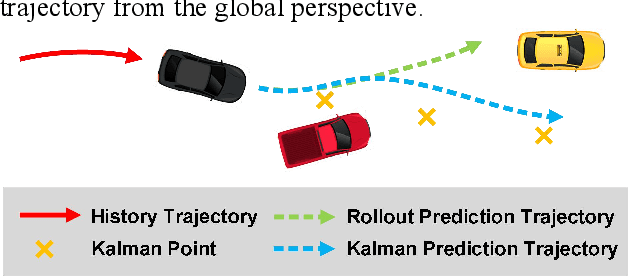

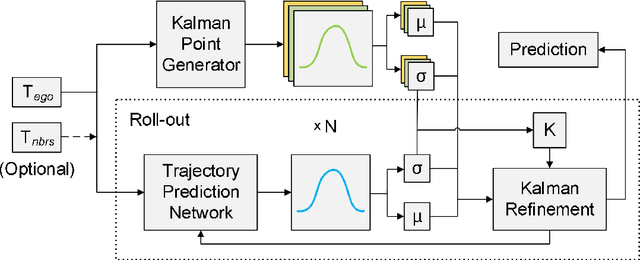
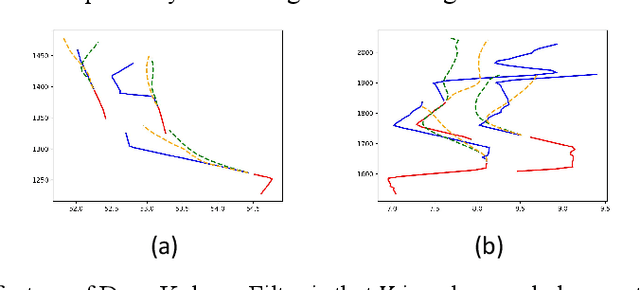
Trajectory prediction plays a pivotal role in the field of intelligent vehicles. It currently suffers from several challenges, e.g., accumulative error in rollout process and weak adaptability in various scenarios. This paper proposes a parametric-learning Kalman filter based on deep neural network for trajectory prediction. We design a flexible plug-in module which can be readily implanted into most rollout approaches. Kalman points are proposed to capture the long-term prediction stability from the global perspective. We carried experiments out on the NGSIM dataset. The promising results indicate that our method could improve rollout trajectory prediction methods effectively.
Spatial-Channel Transformer Network for Trajectory Prediction on the Traffic Scenes
Feb 05, 2021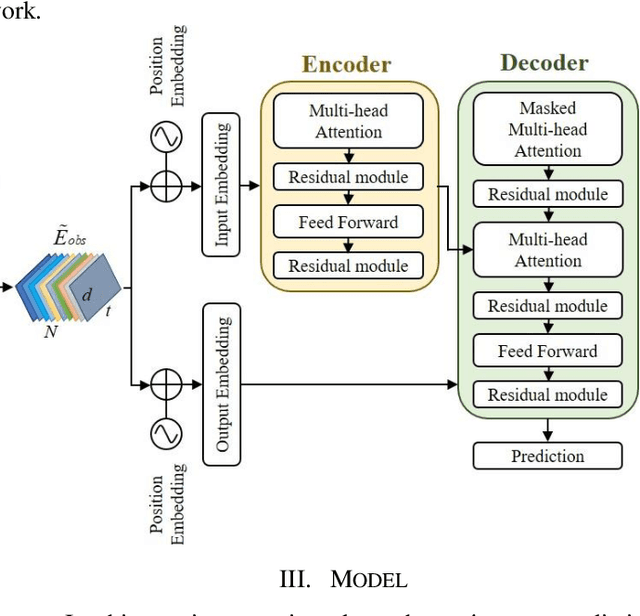
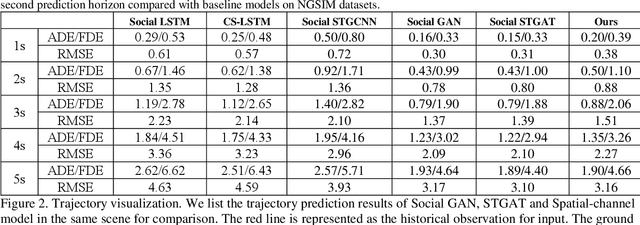
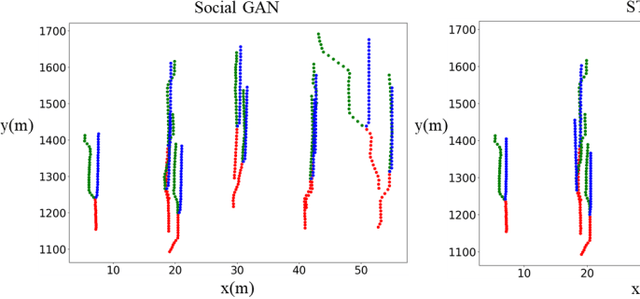
Predicting motion of surrounding agents is critical to real-world applications of tactical path planning for autonomous driving. Due to the complex temporal dependencies and social interactions of agents, on-line trajectory prediction is a challenging task. With the development of attention mechanism in recent years, transformer model has been applied in natural language sequence processing first and then image processing. In this paper, we present a Spatial-Channel Transformer Network for trajectory prediction with attention functions. Instead of RNN models, we employ transformer model to capture the spatial-temporal features of agents. A channel-wise module is inserted to measure the social interaction between agents. We find that the Spatial-Channel Transformer Network achieves promising results on real-world trajectory prediction datasets on the traffic scenes.