Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Kalman Filter: A Refinement Module for the Rollout Trajectory Prediction Methods
Paper and Code
Feb 22, 2021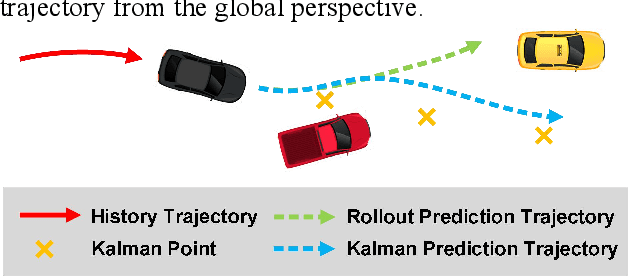

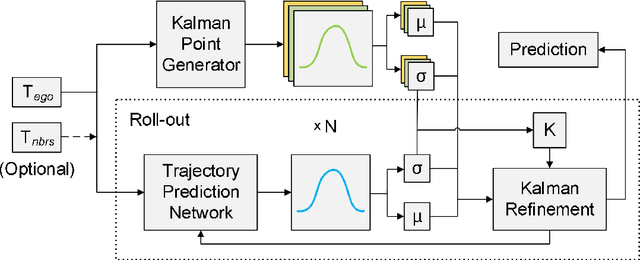
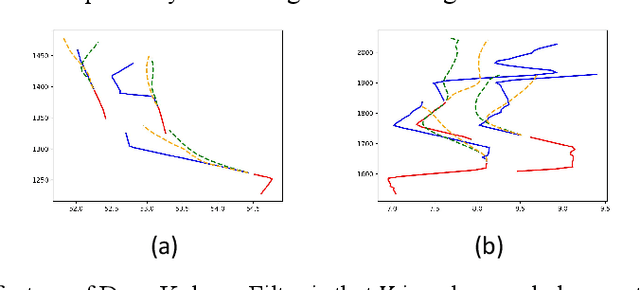
Trajectory prediction plays a pivotal role in the field of intelligent vehicles. It currently suffers from several challenges, e.g., accumulative error in rollout process and weak adaptability in various scenarios. This paper proposes a parametric-learning Kalman filter based on deep neural network for trajectory prediction. We design a flexible plug-in module which can be readily implanted into most rollout approaches. Kalman points are proposed to capture the long-term prediction stability from the global perspective. We carried experiments out on the NGSIM dataset. The promising results indicate that our method could improve rollout trajectory prediction methods effectively.
View paper on