 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Multi-Modal Mobility Dynamics for Generalized Next Location Recommendation
Dec 27, 2025The precise prediction of human mobility has produced significant socioeconomic impacts, such as location recommendations and evacuation suggestions. However, existing methods suffer from limited generalization capability: unimodal approaches are constrained by data sparsity and inherent biases, while multi-modal methods struggle to effectively capture mobility dynamics caused by the semantic gap between static multi-modal representation and spatial-temporal dynamics. Therefore, we leverage multi-modal spatial-temporal knowledge to characterize mobility dynamics for the location recommendation task, dubbed as \textbf{M}ulti-\textbf{M}odal \textbf{Mob}ility (\textbf{M}$^3$\textbf{ob}). First, we construct a unified spatial-temporal relational graph (STRG) for multi-modal representation, by leveraging the functional semantics and spatial-temporal knowledge captured by the large language models (LLMs)-enhanced spatial-temporal knowledge graph (STKG). Second, we design a gating mechanism to fuse spatial-temporal graph representations of different modalities, and propose an STKG-guided cross-modal alignment to inject spatial-temporal dynamic knowledge into the static image modality. Extensive experiments on six public datasets show that our proposed method not only achieves consistent improvements in normal scenarios but also exhibits significant generalization ability in abnormal scenarios.
Dual-branch Spatial-Temporal Self-supervised Representation for Enhanced Road Network Learning
Nov 10, 2025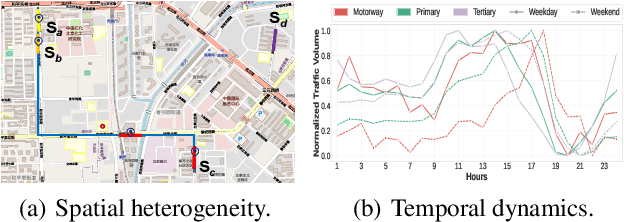



Road network representation learning (RNRL) has attracted increasing attention from both researchers and practitioners as various spatiotemporal tasks are emerging. Recent advanced methods leverage Graph Neural Networks (GNNs) and contrastive learning to characterize the spatial structure of road segments in a self-supervised paradigm. However, spatial heterogeneity and temporal dynamics of road networks raise severe challenges to the neighborhood smoothing mechanism of self-supervised GNNs. To address these issues, we propose a $\textbf{D}$ual-branch $\textbf{S}$patial-$\textbf{T}$emporal self-supervised representation framework for enhanced road representations, termed as DST. On one hand, DST designs a mix-hop transition matrix for graph convolution to incorporate dynamic relations of roads from trajectories. Besides, DST contrasts road representations of the vanilla road network against that of the hypergraph in a spatial self-supervised way. The hypergraph is newly built based on three types of hyperedges to capture long-range relations. On the other hand, DST performs next token prediction as the temporal self-supervised task on the sequences of traffic dynamics based on a causal Transformer, which is further regularized by differentiating traffic modes of weekdays from those of weekends. Extensive experiments against state-of-the-art methods verify the superiority of our proposed framework. Moreover, the comprehensive spatiotemporal modeling facilitates DST to excel in zero-shot learning scenarios.
From GNNs to Trees: Multi-Granular Interpretability for Graph Neural Networks
May 01, 2025Interpretable Graph Neural Networks (GNNs) aim to reveal the underlying reasoning behind model predictions, attributing their decisions to specific subgraphs that are informative. However, existing subgraph-based interpretable methods suffer from an overemphasis on local structure, potentially overlooking long-range dependencies within the entire graphs. Although recent efforts that rely on graph coarsening have proven beneficial for global interpretability, they inevitably reduce the graphs to a fixed granularity. Such an inflexible way can only capture graph connectivity at a specific level, whereas real-world graph tasks often exhibit relationships at varying granularities (e.g., relevant interactions in proteins span from functional groups, to amino acids, and up to protein domains). In this paper, we introduce a novel Tree-like Interpretable Framework (TIF) for graph classification, where plain GNNs are transformed into hierarchical trees, with each level featuring coarsened graphs of different granularity as tree nodes. Specifically, TIF iteratively adopts a graph coarsening module to compress original graphs (i.e., root nodes of trees) into increasingly coarser ones (i.e., child nodes of trees), while preserving diversity among tree nodes within different branches through a dedicated graph perturbation module. Finally, we propose an adaptive routing module to identify the most informative root-to-leaf paths, providing not only the final prediction but also the multi-granular interpretability for the decision-making process. Extensive experiments on the graph classification benchmarks with both synthetic and real-world datasets demonstrate the superiority of TIF in interpretability, while also delivering a competitive prediction performance akin to the state-of-the-art counterparts.
Holistic Semantic Representation for Navigational Trajectory Generation
Jan 06, 2025



Trajectory generation has garnered significant attention from researchers in the field of spatio-temporal analysis, as it can generate substantial synthesized human mobility trajectories that enhance user privacy and alleviate data scarcity. However, existing trajectory generation methods often focus on improving trajectory generation quality from a singular perspective, lacking a comprehensive semantic understanding across various scales. Consequently, we are inspired to develop a HOlistic SEmantic Representation (HOSER) framework for navigational trajectory generation. Given an origin-and-destination (OD) pair and the starting time point of a latent trajectory, we first propose a Road Network Encoder to expand the receptive field of road- and zone-level semantics. Second, we design a Multi-Granularity Trajectory Encoder to integrate the spatio-temporal semantics of the generated trajectory at both the point and trajectory levels. Finally, we employ a Destination-Oriented Navigator to seamlessly integrate destination-oriented guidance. Extensive experiments on three real-world datasets demonstrate that HOSER outperforms state-of-the-art baselines by a significant margin. Moreover, the model's performance in few-shot learning and zero-shot learning scenarios further verifies the effectiveness of our holistic semantic representation.
AGMI: Attention-Guided Multi-omics Integration for Drug Response Prediction with Graph Neural Networks
Jan 10, 2022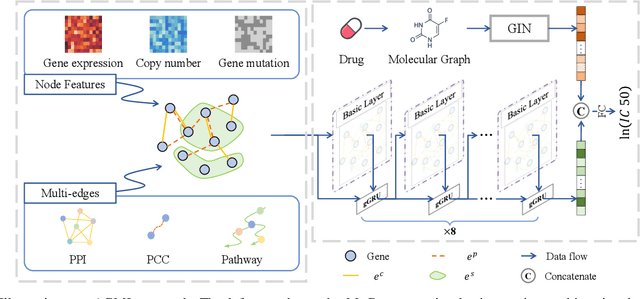
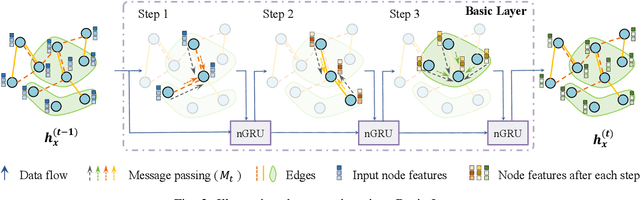
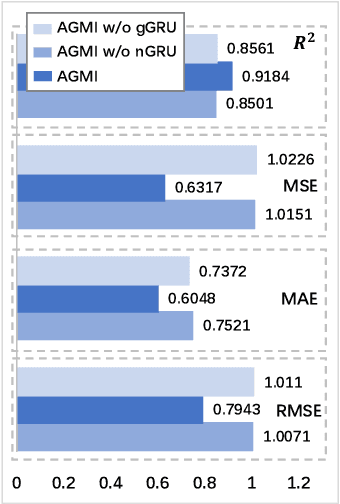
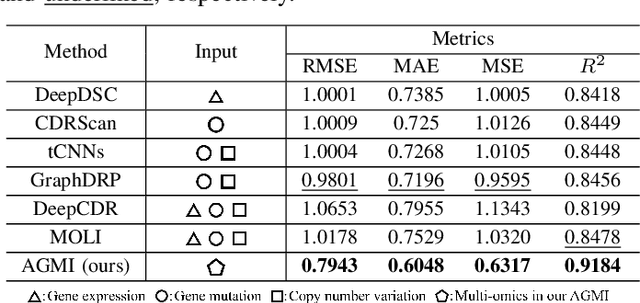
Accurate drug response prediction (DRP) is a crucial yet challenging task in precision medicine. This paper presents a novel Attention-Guided Multi-omics Integration (AGMI) approach for DRP, which first constructs a Multi-edge Graph (MeG) for each cell line, and then aggregates multi-omics features to predict drug response using a novel structure, called Graph edge-aware Network (GeNet). For the first time, our AGMI approach explores gene constraint based multi-omics integration for DRP with the whole-genome using GNNs. Empirical experiments on the CCLE and GDSC datasets show that our AGMI largely outperforms state-of-the-art DRP methods by 8.3%--34.2% on four metrics. Our data and code are available at https://github.com/yivan-WYYGDSG/AGMI.