 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA System and Benchmark for LLM-based Q&A on Heterogeneous Data
Sep 10, 2024In many industrial settings, users wish to ask questions whose answers may be found in structured data sources such as a spreadsheets, databases, APIs, or combinations thereof. Often, the user doesn't know how to identify or access the right data source. This problem is compounded even further if multiple (and potentially siloed) data sources must be assembled to derive the answer. Recently, various Text-to-SQL applications that leverage Large Language Models (LLMs) have addressed some of these problems by enabling users to ask questions in natural language. However, these applications remain impractical in realistic industrial settings because they fail to cope with the data source heterogeneity that typifies such environments. In this paper, we address heterogeneity by introducing the siwarex platform, which enables seamless natural language access to both databases and APIs. To demonstrate the effectiveness of siwarex, we extend the popular Spider dataset and benchmark by replacing some of its tables by data retrieval APIs. We find that siwarex does a good job of coping with data source heterogeneity. Our modified Spider benchmark will soon be available to the research community
Weakly-Supervised 3D Hand Reconstruction with Knowledge Prior and Uncertainty Guidance
Jul 17, 2024Fully-supervised monocular 3D hand reconstruction is often difficult because capturing the requisite 3D data entails deploying specialized equipment in a controlled environment. We introduce a weakly-supervised method that avoids such requirements by leveraging fundamental principles well-established in the understanding of the human hand's unique structure and functionality. Specifically, we systematically study hand knowledge from different sources, including biomechanics, functional anatomy, and physics. We effectively incorporate these valuable foundational insights into 3D hand reconstruction models through an appropriate set of differentiable training losses. This enables training solely with readily-obtainable 2D hand landmark annotations and eliminates the need for expensive 3D supervision. Moreover, we explicitly model the uncertainty that is inherent in image observations. We enhance the training process by exploiting a simple yet effective Negative Log Likelihood (NLL) loss that incorporates uncertainty into the loss function. Through extensive experiments, we demonstrate that our method significantly outperforms state-of-the-art weakly-supervised methods. For example, our method achieves nearly a 21\% performance improvement on the widely adopted FreiHAND dataset.
PhysPT: Physics-aware Pretrained Transformer for Estimating Human Dynamics from Monocular Videos
Apr 05, 2024While current methods have shown promising progress on estimating 3D human motion from monocular videos, their motion estimates are often physically unrealistic because they mainly consider kinematics. In this paper, we introduce Physics-aware Pretrained Transformer (PhysPT), which improves kinematics-based motion estimates and infers motion forces. PhysPT exploits a Transformer encoder-decoder backbone to effectively learn human dynamics in a self-supervised manner. Moreover, it incorporates physics principles governing human motion. Specifically, we build a physics-based body representation and contact force model. We leverage them to impose novel physics-inspired training losses (i.e., force loss, contact loss, and Euler-Lagrange loss), enabling PhysPT to capture physical properties of the human body and the forces it experiences. Experiments demonstrate that, once trained, PhysPT can be directly applied to kinematics-based estimates to significantly enhance their physical plausibility and generate favourable motion forces. Furthermore, we show that these physically meaningful quantities translate into improved accuracy of an important downstream task: human action recognition.
Body Knowledge and Uncertainty Modeling for Monocular 3D Human Body Reconstruction
Aug 01, 2023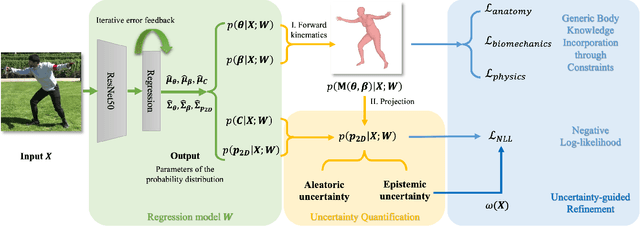



While 3D body reconstruction methods have made remarkable progress recently, it remains difficult to acquire the sufficiently accurate and numerous 3D supervisions required for training. In this paper, we propose \textbf{KNOWN}, a framework that effectively utilizes body \textbf{KNOW}ledge and u\textbf{N}certainty modeling to compensate for insufficient 3D supervisions. KNOWN exploits a comprehensive set of generic body constraints derived from well-established body knowledge. These generic constraints precisely and explicitly characterize the reconstruction plausibility and enable 3D reconstruction models to be trained without any 3D data. Moreover, existing methods typically use images from multiple datasets during training, which can result in data noise (\textit{e.g.}, inconsistent joint annotation) and data imbalance (\textit{e.g.}, minority images representing unusual poses or captured from challenging camera views). KNOWN solves these problems through a novel probabilistic framework that models both aleatoric and epistemic uncertainty. Aleatoric uncertainty is encoded in a robust Negative Log-Likelihood (NLL) training loss, while epistemic uncertainty is used to guide model refinement. Experiments demonstrate that KNOWN's body reconstruction outperforms prior weakly-supervised approaches, particularly on the challenging minority images.
Visualizations for an Explainable Planning Agent
Feb 08, 2018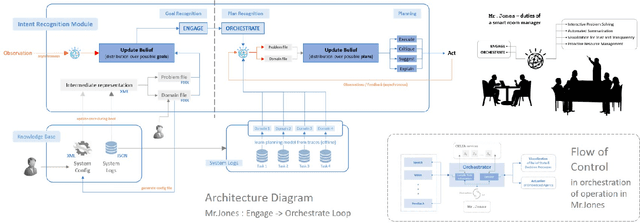
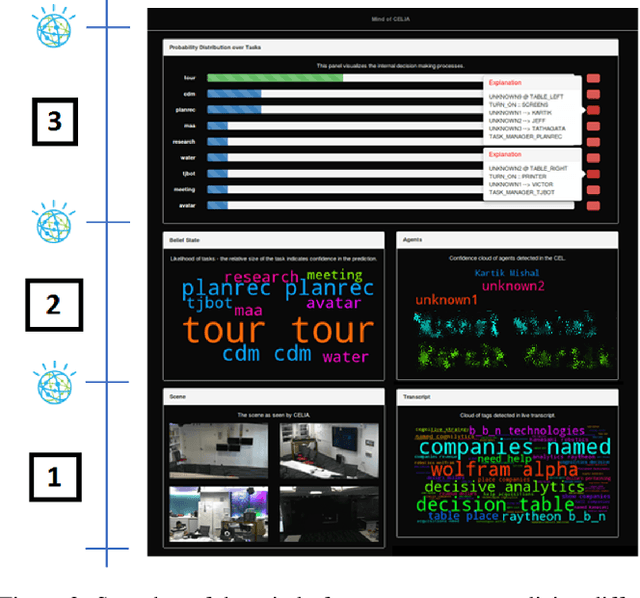


In this paper, we report on the visualization capabilities of an Explainable AI Planning (XAIP) agent that can support human in the loop decision making. Imposing transparency and explainability requirements on such agents is especially important in order to establish trust and common ground with the end-to-end automated planning system. Visualizing the agent's internal decision-making processes is a crucial step towards achieving this. This may include externalizing the "brain" of the agent -- starting from its sensory inputs, to progressively higher order decisions made by it in order to drive its planning components. We also show how the planner can bootstrap on the latest techniques in explainable planning to cast plan visualization as a plan explanation problem, and thus provide concise model-based visualization of its plans. We demonstrate these functionalities in the context of the automated planning components of a smart assistant in an instrumented meeting space.
Workflow Complexity for Collaborative Interactions: Where are the Metrics? -- A Challenge
Sep 13, 2017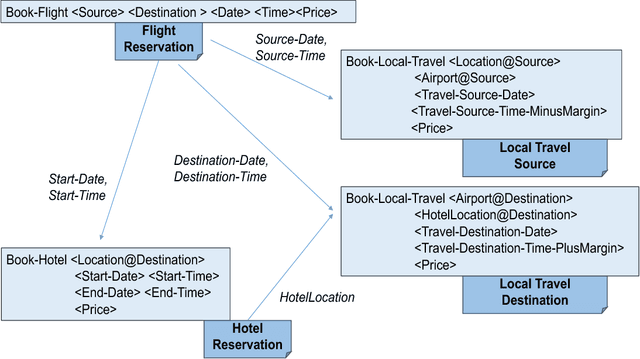
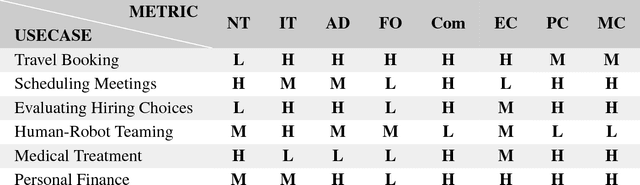
In this paper, we introduce the problem of denoting and deriving the complexity of workflows (plans, schedules) in collaborative, planner-assisted settings where humans and agents are trying to jointly solve a task. The interactions -- and hence the workflows that connect the human and the agents -- may differ according to the domain and the kind of agents. We adapt insights from prior work in human-agent teaming and workflow analysis to suggest metrics for workflow complexity. The main motivation behind this work is to highlight metrics for human comprehensibility of plans and schedules. The planning community has seen its fair share of work on the synthesis of plans that take diversity into account -- what value do such plans hold if their generation is not guided at least in part by metrics that reflect the ease of engaging with and using those plans?