 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScene Flow as a Partial Differential Equation
Oct 02, 2024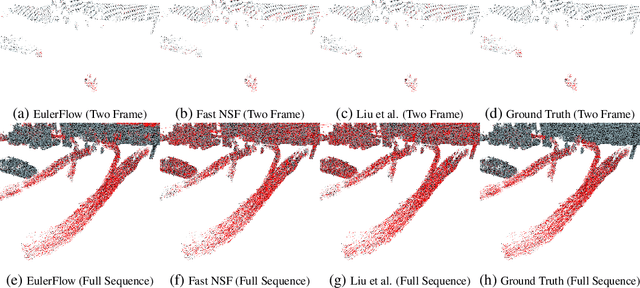



We reframe scene flow as the problem of estimating a continuous space and time PDE that describes motion for an entire observation sequence, represented with a neural prior. Our resulting unsupervised method, EulerFlow, produces high quality scene flow on real-world data across multiple domains, including large-scale autonomous driving scenes and dynamic tabletop settings. Notably, EulerFlow produces high quality flow on small, fast moving objects like birds and tennis balls, and exhibits emergent 3D point tracking behavior by solving its estimated PDE over long time horizons. On the Argoverse 2 2024 Scene Flow Challenge, EulerFlow outperforms all prior art, beating the next best unsupervised method by over 2.5x and the next best supervised method by over 10%.
I Can't Believe It's Not Scene Flow!
Mar 07, 2024



Current scene flow methods broadly fail to describe motion on small objects, and current scene flow evaluation protocols hide this failure by averaging over many points, with most drawn larger objects. To fix this evaluation failure, we propose a new evaluation protocol, Bucket Normalized EPE, which is class-aware and speed-normalized, enabling contextualized error comparisons between object types that move at vastly different speeds. To highlight current method failures, we propose a frustratingly simple supervised scene flow baseline, TrackFlow, built by bolting a high-quality pretrained detector (trained using many class rebalancing techniques) onto a simple tracker, that produces state-of-the-art performance on current standard evaluations and large improvements over prior art on our new evaluation. Our results make it clear that all scene flow evaluations must be class and speed aware, and supervised scene flow methods must address point class imbalances. We release the evaluation code publicly at https://github.com/kylevedder/BucketedSceneFlowEval.
ZeroFlow: Fast Zero Label Scene Flow via Distillation
May 23, 2023



Scene flow estimation is the task of describing the 3D motion field between temporally successive point clouds. State-of-the-art methods use strong priors and test-time optimization techniques, but require on the order of tens of seconds for large-scale point clouds, making them unusable as computer vision primitives for real-time applications such as open world object detection. Feed forward methods are considerably faster, running on the order of tens to hundreds of milliseconds for large-scale point clouds, but require expensive human supervision. To address both limitations, we propose Scene Flow via Distillation, a simple distillation framework that uses a label-free optimization method to produce pseudo-labels to supervise a feed forward model. Our instantiation of this framework, ZeroFlow, produces scene flow estimates in real-time on large-scale point clouds at quality competitive with state-of-the-art methods while using zero human labels. Notably, at test-time ZeroFlow is over 1000$\times$ faster than label-free state-of-the-art optimization-based methods on large-scale point clouds and over 1000$\times$ cheaper to train on unlabeled data compared to the cost of human annotation of that data. To facilitate research reuse, we release our code, trained model weights, and high quality pseudo-labels for the Argoverse 2 and Waymo Open datasets.
ADCNet: End-to-end perception with raw radar ADC data
Mar 28, 2023There is a renewed interest in radar sensors in the autonomous driving industry. As a relatively mature technology, radars have seen steady improvement over the last few years, making them an appealing alternative or complement to the commonly used LiDARs. An emerging trend is to leverage rich, low-level radar data for perception. In this work we push this trend to the extreme -- we propose a method to perform end-to-end learning on the raw radar analog-to-digital (ADC) data. Specifically, we design a learnable signal processing module inside the neural network, and a pre-training method guided by traditional signal processing algorithms. Experiment results corroborate the overall efficacy of the end-to-end learning method, while an ablation study validates the effectiveness of our individual innovations.
Agent-aware State Estimation in Autonomous Vehicles
Aug 01, 2021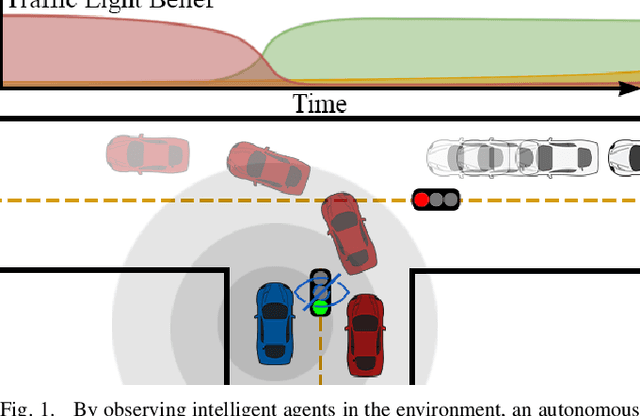
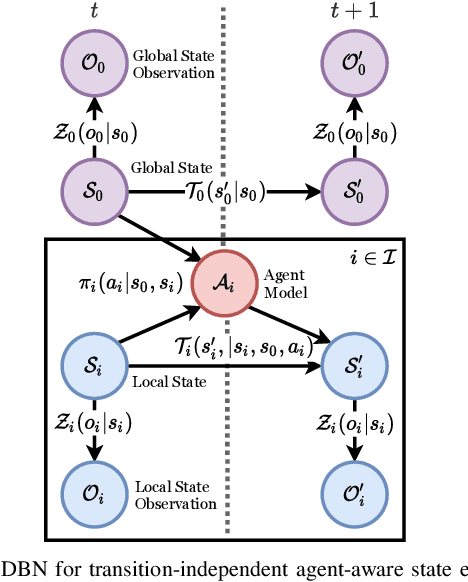
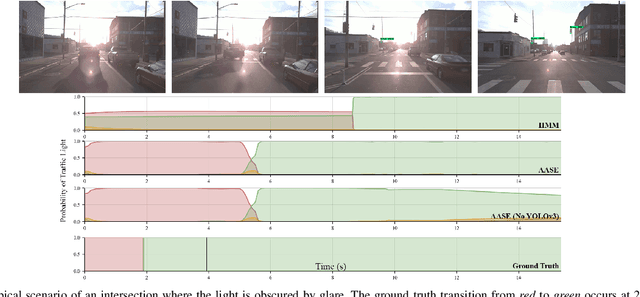
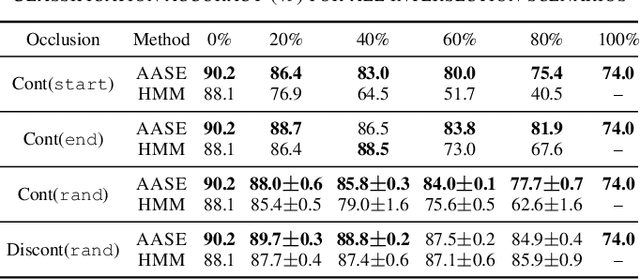
Autonomous systems often operate in environments where the behavior of multiple agents is coordinated by a shared global state. Reliable estimation of the global state is thus critical for successfully operating in a multi-agent setting. We introduce agent-aware state estimation -- a framework for calculating indirect estimations of state given observations of the behavior of other agents in the environment. We also introduce transition-independent agent-aware state estimation -- a tractable class of agent-aware state estimation -- and show that it allows the speed of inference to scale linearly with the number of agents in the environment. As an example, we model traffic light classification in instances of complete loss of direct observation. By taking into account observations of vehicular behavior from multiple directions of traffic, our approach exhibits accuracy higher than that of existing traffic light-only HMM methods on a real-world autonomous vehicle data set under a variety of simulated occlusion scenarios.