 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoGER-SLAM: A Robust Gaussian Splatting SLAM System for Noisy and Low-light Environment Resilience
Oct 26, 2025The reliability of Simultaneous Localization and Mapping (SLAM) is severely constrained in environments where visual inputs suffer from noise and low illumination. Although recent 3D Gaussian Splatting (3DGS) based SLAM frameworks achieve high-fidelity mapping under clean conditions, they remain vulnerable to compounded degradations that degrade mapping and tracking performance. A key observation underlying our work is that the original 3DGS rendering pipeline inherently behaves as an implicit low-pass filter, attenuating high-frequency noise but also risking over-smoothing. Building on this insight, we propose RoGER-SLAM, a robust 3DGS SLAM system tailored for noise and low-light resilience. The framework integrates three innovations: a Structure-Preserving Robust Fusion (SP-RoFusion) mechanism that couples rendered appearance, depth, and edge cues; an adaptive tracking objective with residual balancing regularization; and a Contrastive Language-Image Pretraining (CLIP)-based enhancement module, selectively activated under compounded degradations to restore semantic and structural fidelity. Comprehensive experiments on Replica, TUM, and real-world sequences show that RoGER-SLAM consistently improves trajectory accuracy and reconstruction quality compared with other 3DGS-SLAM systems, especially under adverse imaging conditions.
MAP: End-to-End Autonomous Driving with Map-Assisted Planning
Sep 17, 2025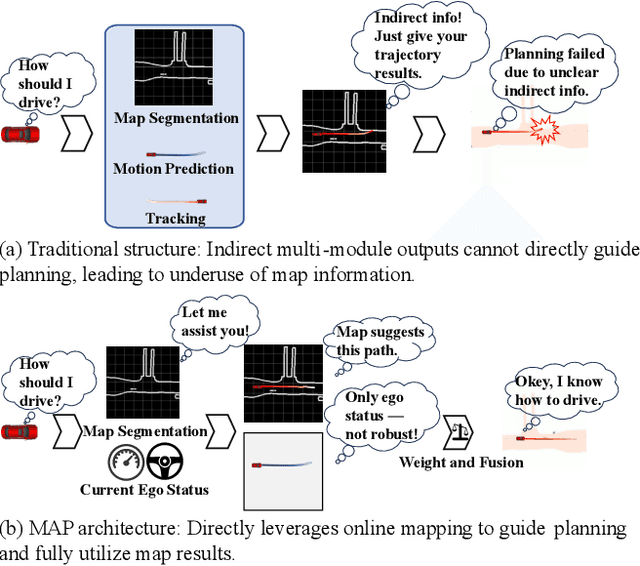


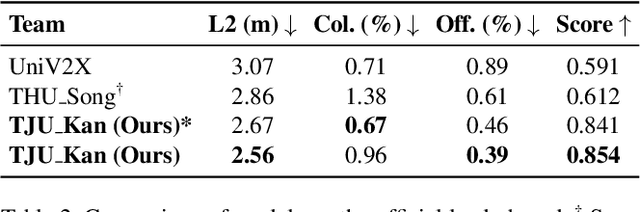
In recent years, end-to-end autonomous driving has attracted increasing attention for its ability to jointly model perception, prediction, and planning within a unified framework. However, most existing approaches underutilize the online mapping module, leaving its potential to enhance trajectory planning largely untapped. This paper proposes MAP (Map-Assisted Planning), a novel map-assisted end-to-end trajectory planning framework. MAP explicitly integrates segmentation-based map features and the current ego status through a Plan-enhancing Online Mapping module, an Ego-status-guided Planning module, and a Weight Adapter based on current ego status. Experiments conducted on the DAIR-V2X-seq-SPD dataset demonstrate that the proposed method achieves a 16.6% reduction in L2 displacement error, a 56.2% reduction in off-road rate, and a 44.5% improvement in overall score compared to the UniV2X baseline, even without post-processing. Furthermore, it achieves top ranking in Track 2 of the End-to-End Autonomous Driving through V2X Cooperation Challenge of MEIS Workshop @CVPR2025, outperforming the second-best model by 39.5% in terms of overall score. These results highlight the effectiveness of explicitly leveraging semantic map features in planning and suggest new directions for improving structure design in end-to-end autonomous driving systems. Our code is available at https://gitee.com/kymkym/map.git
Adversarial Examples in Environment Perception for Automated Driving (Review)
Apr 11, 2025The renaissance of deep learning has led to the massive development of automated driving. However, deep neural networks are vulnerable to adversarial examples. The perturbations of adversarial examples are imperceptible to human eyes but can lead to the false predictions of neural networks. It poses a huge risk to artificial intelligence (AI) applications for automated driving. This survey systematically reviews the development of adversarial robustness research over the past decade, including the attack and defense methods and their applications in automated driving. The growth of automated driving pushes forward the realization of trustworthy AI applications. This review lists significant references in the research history of adversarial examples.
WS-DETR: Robust Water Surface Object Detection through Vision-Radar Fusion with Detection Transformer
Apr 10, 2025Robust object detection for Unmanned Surface Vehicles (USVs) in complex water environments is essential for reliable navigation and operation. Specifically, water surface object detection faces challenges from blurred edges and diverse object scales. Although vision-radar fusion offers a feasible solution, existing approaches suffer from cross-modal feature conflicts, which negatively affect model robustness. To address this problem, we propose a robust vision-radar fusion model WS-DETR. In particular, we first introduce a Multi-Scale Edge Information Integration (MSEII) module to enhance edge perception and a Hierarchical Feature Aggregator (HiFA) to boost multi-scale object detection in the encoder. Then, we adopt self-moving point representations for continuous convolution and residual connection to efficiently extract irregular features under the scenarios of irregular point cloud data. To further mitigate cross-modal conflicts, an Adaptive Feature Interactive Fusion (AFIF) module is introduced to integrate visual and radar features through geometric alignment and semantic fusion. Extensive experiments on the WaterScenes dataset demonstrate that WS-DETR achieves state-of-the-art (SOTA) performance, maintaining its superiority even under adverse weather and lighting conditions.
Attention-Augmented Inverse Reinforcement Learning with Graph Convolutions for Multi-Agent Task Allocation
Apr 08, 2025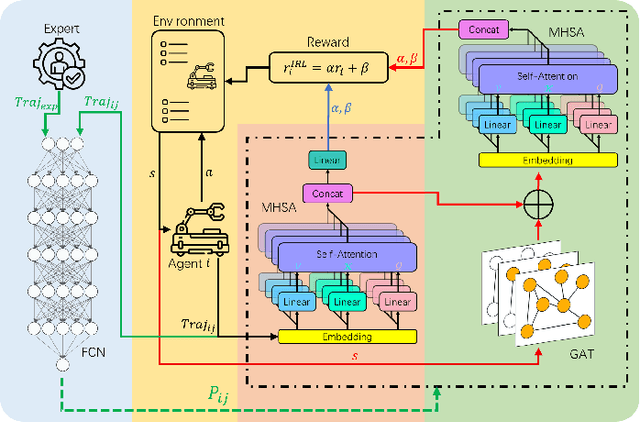
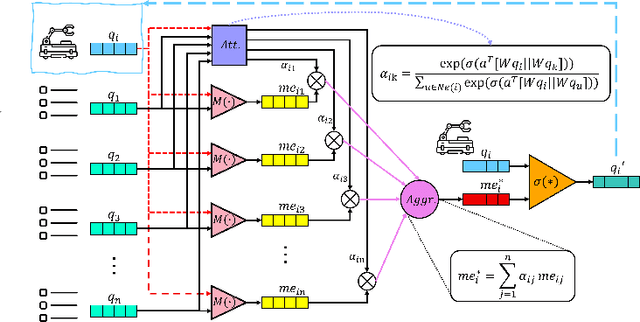
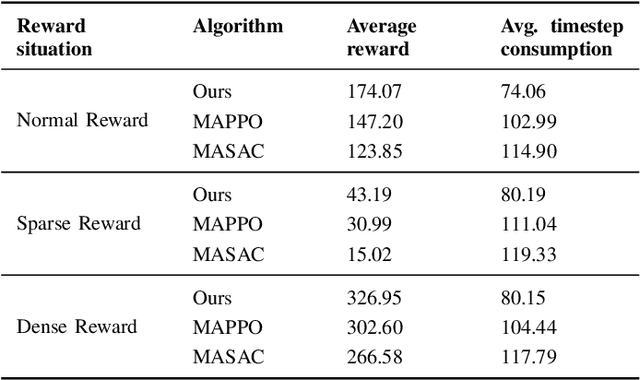
Multi-agent task allocation (MATA) plays a vital role in cooperative multi-agent systems, with significant implications for applications such as logistics, search and rescue, and robotic coordination. Although traditional deep reinforcement learning (DRL) methods have been shown to be promising, their effectiveness is hindered by a reliance on manually designed reward functions and inefficiencies in dynamic environments. In this paper, an inverse reinforcement learning (IRL)-based framework is proposed, in which multi-head self-attention (MHSA) and graph attention mechanisms are incorporated to enhance reward function learning and task execution efficiency. Expert demonstrations are utilized to infer optimal reward densities, allowing dependence on handcrafted designs to be reduced and adaptability to be improved. Extensive experiments validate the superiority of the proposed method over widely used multi-agent reinforcement learning (MARL) algorithms in terms of both cumulative rewards and task execution efficiency.
Graph-Driven Models for Gas Mixture Identification and Concentration Estimation on Heterogeneous Sensor Array Signals
Dec 18, 2024Accurately identifying gas mixtures and estimating their concentrations are crucial across various industrial applications using gas sensor arrays. However, existing models face challenges in generalizing across heterogeneous datasets, which limits their scalability and practical applicability. To address this problem, this study develops two novel deep-learning models that integrate temporal graph structures for enhanced performance: a Graph-Enhanced Capsule Network (GraphCapsNet) employing dynamic routing for gas mixture classification and a Graph-Enhanced Attention Network (GraphANet) leveraging self-attention for concentration estimation. Both models were validated on datasets from the University of California, Irvine (UCI) Machine Learning Repository and a custom dataset, demonstrating superior performance in gas mixture identification and concentration estimation compared to recent models. In classification tasks, GraphCapsNet achieved over 98.00% accuracy across multiple datasets, while in concentration estimation, GraphANet attained an R2 score exceeding 0.96 across various gas components. Both GraphCapsNet and GraphANet exhibited significantly higher accuracy and stability, positioning them as promising solutions for scalable gas analysis in industrial settings.
Segment-Anything Models Achieve Zero-shot Robustness in Autonomous Driving
Aug 19, 2024



Semantic segmentation is a significant perception task in autonomous driving. It suffers from the risks of adversarial examples. In the past few years, deep learning has gradually transitioned from convolutional neural network (CNN) models with a relatively small number of parameters to foundation models with a huge number of parameters. The segment-anything model (SAM) is a generalized image segmentation framework that is capable of handling various types of images and is able to recognize and segment arbitrary objects in an image without the need to train on a specific object. It is a unified model that can handle diverse downstream tasks, including semantic segmentation, object detection, and tracking. In the task of semantic segmentation for autonomous driving, it is significant to study the zero-shot adversarial robustness of SAM. Therefore, we deliver a systematic empirical study on the robustness of SAM without additional training. Based on the experimental results, the zero-shot adversarial robustness of the SAM under the black-box corruptions and white-box adversarial attacks is acceptable, even without the need for additional training. The finding of this study is insightful in that the gigantic model parameters and huge amounts of training data lead to the phenomenon of emergence, which builds a guarantee of adversarial robustness. SAM is a vision foundation model that can be regarded as an early prototype of an artificial general intelligence (AGI) pipeline. In such a pipeline, a unified model can handle diverse tasks. Therefore, this research not only inspects the impact of vision foundation models on safe autonomous driving but also provides a perspective on developing trustworthy AGI. The code is available at: https://github.com/momo1986/robust_sam_iv.
Random Network Distillation Based Deep Reinforcement Learning for AGV Path Planning
Apr 19, 2024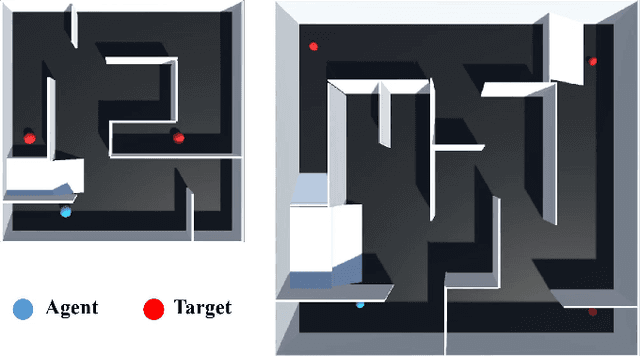
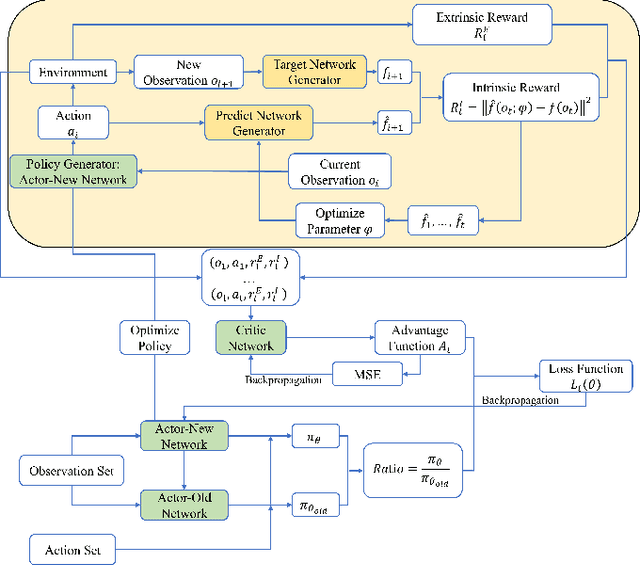
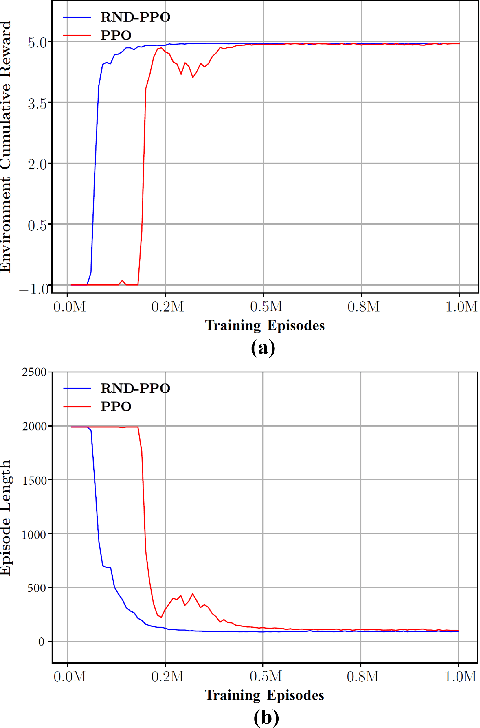
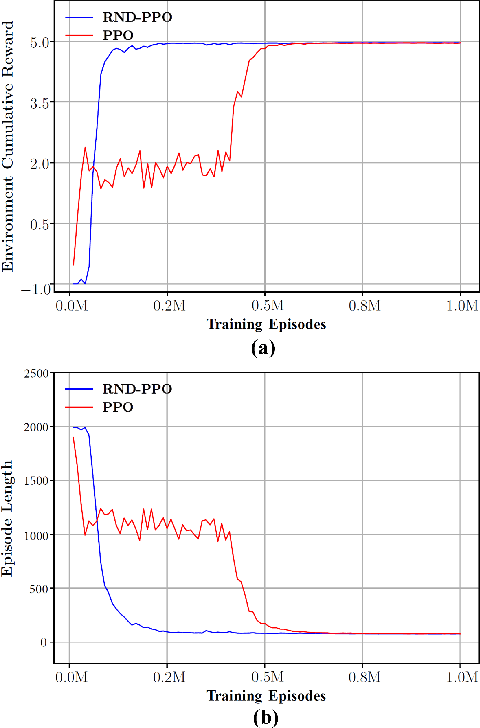
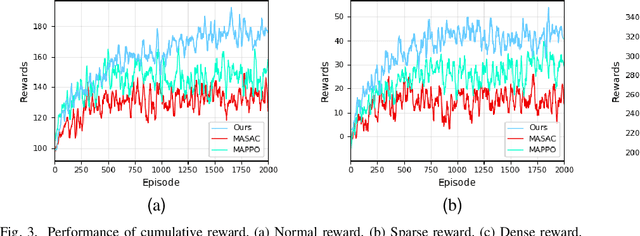
With the flourishing development of intelligent warehousing systems, the technology of Automated Guided Vehicle (AGV) has experienced rapid growth. Within intelligent warehousing environments, AGV is required to safely and rapidly plan an optimal path in complex and dynamic environments. Most research has studied deep reinforcement learning to address this challenge. However, in the environments with sparse extrinsic rewards, these algorithms often converge slowly, learn inefficiently or fail to reach the target. Random Network Distillation (RND), as an exploration enhancement, can effectively improve the performance of proximal policy optimization, especially enhancing the additional intrinsic rewards of the AGV agent which is in sparse reward environments. Moreover, most of the current research continues to use 2D grid mazes as experimental environments. These environments have insufficient complexity and limited action sets. To solve this limitation, we present simulation environments of AGV path planning with continuous actions and positions for AGVs, so that it can be close to realistic physical scenarios. Based on our experiments and comprehensive analysis of the proposed method, the results demonstrate that our proposed method enables AGV to more rapidly complete path planning tasks with continuous actions in our environments. A video of part of our experiments can be found at https://youtu.be/lwrY9YesGmw.
SA-Attack: Speed-adaptive stealthy adversarial attack on trajectory prediction
Apr 19, 2024Trajectory prediction is critical for the safe planning and navigation of automated vehicles. The trajectory prediction models based on the neural networks are vulnerable to adversarial attacks. Previous attack methods have achieved high attack success rates but overlook the adaptability to realistic scenarios and the concealment of the deceits. To address this problem, we propose a speed-adaptive stealthy adversarial attack method named SA-Attack. This method searches the sensitive region of trajectory prediction models and generates the adversarial trajectories by using the vehicle-following method and incorporating information about forthcoming trajectories. Our method has the ability to adapt to different speed scenarios by reconstructing the trajectory from scratch. Fusing future trajectory trends and curvature constraints can guarantee the smoothness of adversarial trajectories, further ensuring the stealthiness of attacks. The empirical study on the datasets of nuScenes and Apolloscape demonstrates the attack performance of our proposed method. Finally, we also demonstrate the adaptability and stealthiness of SA-Attack for different speed scenarios. Our code is available at the repository: https://github.com/eclipse-bot/SA-Attack.
PICNN: A Pathway towards Interpretable Convolutional Neural Networks
Dec 19, 2023Convolutional Neural Networks (CNNs) have exhibited great performance in discriminative feature learning for complex visual tasks. Besides discrimination power, interpretability is another important yet under-explored property for CNNs. One difficulty in the CNN interpretability is that filters and image classes are entangled. In this paper, we introduce a novel pathway to alleviate the entanglement between filters and image classes. The proposed pathway groups the filters in a late conv-layer of CNN into class-specific clusters. Clusters and classes are in a one-to-one relationship. Specifically, we use the Bernoulli sampling to generate the filter-cluster assignment matrix from a learnable filter-class correspondence matrix. To enable end-to-end optimization, we develop a novel reparameterization trick for handling the non-differentiable Bernoulli sampling. We evaluate the effectiveness of our method on ten widely used network architectures (including nine CNNs and a ViT) and five benchmark datasets. Experimental results have demonstrated that our method PICNN (the combination of standard CNNs with our proposed pathway) exhibits greater interpretability than standard CNNs while achieving higher or comparable discrimination power.