 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRandom Network Distillation Based Deep Reinforcement Learning for AGV Path Planning
Apr 19, 2024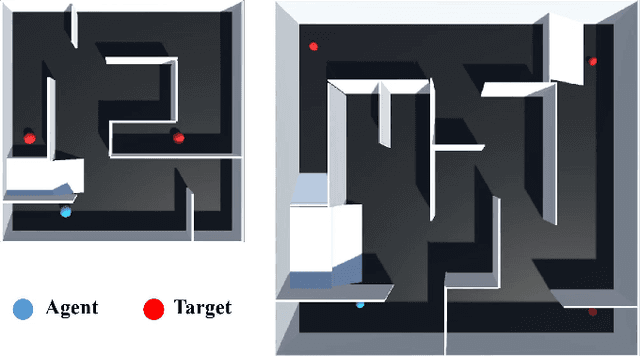
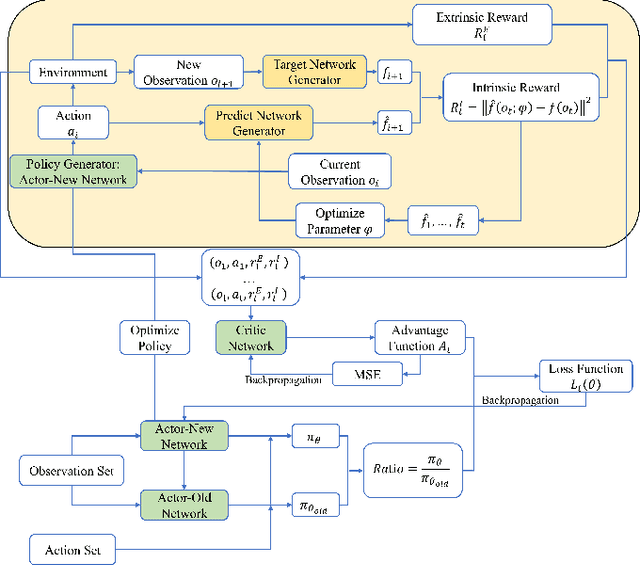
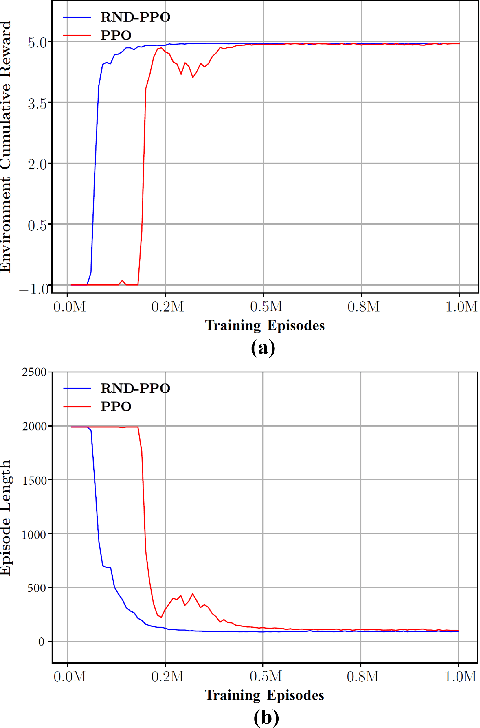
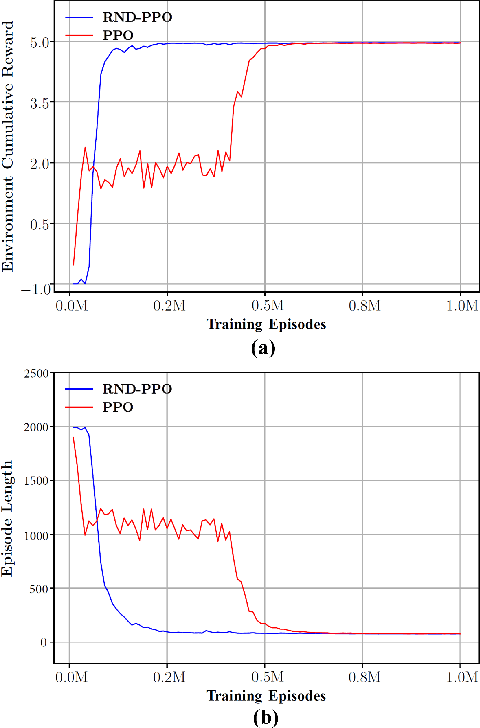
With the flourishing development of intelligent warehousing systems, the technology of Automated Guided Vehicle (AGV) has experienced rapid growth. Within intelligent warehousing environments, AGV is required to safely and rapidly plan an optimal path in complex and dynamic environments. Most research has studied deep reinforcement learning to address this challenge. However, in the environments with sparse extrinsic rewards, these algorithms often converge slowly, learn inefficiently or fail to reach the target. Random Network Distillation (RND), as an exploration enhancement, can effectively improve the performance of proximal policy optimization, especially enhancing the additional intrinsic rewards of the AGV agent which is in sparse reward environments. Moreover, most of the current research continues to use 2D grid mazes as experimental environments. These environments have insufficient complexity and limited action sets. To solve this limitation, we present simulation environments of AGV path planning with continuous actions and positions for AGVs, so that it can be close to realistic physical scenarios. Based on our experiments and comprehensive analysis of the proposed method, the results demonstrate that our proposed method enables AGV to more rapidly complete path planning tasks with continuous actions in our environments. A video of part of our experiments can be found at https://youtu.be/lwrY9YesGmw.
SA-Attack: Speed-adaptive stealthy adversarial attack on trajectory prediction
Apr 19, 2024Trajectory prediction is critical for the safe planning and navigation of automated vehicles. The trajectory prediction models based on the neural networks are vulnerable to adversarial attacks. Previous attack methods have achieved high attack success rates but overlook the adaptability to realistic scenarios and the concealment of the deceits. To address this problem, we propose a speed-adaptive stealthy adversarial attack method named SA-Attack. This method searches the sensitive region of trajectory prediction models and generates the adversarial trajectories by using the vehicle-following method and incorporating information about forthcoming trajectories. Our method has the ability to adapt to different speed scenarios by reconstructing the trajectory from scratch. Fusing future trajectory trends and curvature constraints can guarantee the smoothness of adversarial trajectories, further ensuring the stealthiness of attacks. The empirical study on the datasets of nuScenes and Apolloscape demonstrates the attack performance of our proposed method. Finally, we also demonstrate the adaptability and stealthiness of SA-Attack for different speed scenarios. Our code is available at the repository: https://github.com/eclipse-bot/SA-Attack.