 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDinoRADE: Full Spectral Radar-Camera Fusion with Vision Foundation Model Features for Multi-class Object Detection in Adverse Weather
Apr 09, 2026Reliable and weather-robust perception systems are essential for safe autonomous driving and typically employ multi-modal sensor configurations to achieve comprehensive environmental awareness. While recent automotive FMCW Radar-based approaches achieved remarkable performance on detection tasks in adverse weather conditions, they exhibited limitations in resolving fine-grained spatial details particularly critical for detecting smaller and vulnerable road users (VRUs). Furthermore, existing research has not adequately addressed VRU detection in adverse weather datasets such as K-Radar. We present DinoRADE, a Radar-centered detection pipeline that processes dense Radar tensors and aggregates vision features around transformed reference points in the camera perspective via deformable cross-attention. Vision features are provided by a DINOv3 Vision Foundation Model. We present a comprehensive performance evaluation on the K-Radar dataset in all weather conditions and are among the first to report detection performance individually for five object classes. Additionally, we compare our method with existing single-class detection approaches and outperform recent Radar-camera approaches by 12.1%. The code is available under https://github.com/chr-is-tof/RADE-Net.
DTP-Attack: A decision-based black-box adversarial attack on trajectory prediction
Mar 27, 2026Trajectory prediction systems are critical for autonomous vehicle safety, yet remain vulnerable to adversarial attacks that can cause catastrophic traffic behavior misinterpretations. Existing attack methods require white-box access with gradient information and rely on rigid physical constraints, limiting real-world applicability. We propose DTP-Attack, a decision-based black-box adversarial attack framework tailored for trajectory prediction systems. Our method operates exclusively on binary decision outputs without requiring model internals or gradients, making it practical for real-world scenarios. DTP-Attack employs a novel boundary walking algorithm that navigates adversarial regions without fixed constraints, naturally maintaining trajectory realism through proximity preservation. Unlike existing approaches, our method supports both intention misclassification attacks and prediction accuracy degradation. Extensive evaluation on nuScenes and Apolloscape datasets across state-of-the-art models including Trajectron++ and Grip++ demonstrates superior performance. DTP-Attack achieves 41 - 81% attack success rates for intention misclassification attacks that manipulate perceived driving maneuvers with perturbations below 0.45 m, and increases prediction errors by 1.9 - 4.2 for accuracy degradation. Our method consistently outperforms existing black-box approaches while maintaining high controllability and reliability across diverse scenarios. These results reveal fundamental vulnerabilities in current trajectory prediction systems, highlighting urgent needs for robust defenses in safety-critical autonomous driving applications.
RADE-Net: Robust Attention Network for Radar-Only Object Detection in Adverse Weather
Feb 23, 2026Automotive perception systems are obligated to meet high requirements. While optical sensors such as Camera and Lidar struggle in adverse weather conditions, Radar provides a more robust perception performance, effectively penetrating fog, rain, and snow. Since full Radar tensors have large data sizes and very few datasets provide them, most Radar-based approaches work with sparse point clouds or 2D projections, which can result in information loss. Additionally, deep learning methods show potential to extract richer and more dense features from low level Radar data and therefore significantly increase the perception performance. Therefore, we propose a 3D projection method for fast-Fourier-transformed 4D Range-Azimuth-Doppler-Elevation (RADE) tensors. Our method preserves rich Doppler and Elevation features while reducing the required data size for a single frame by 91.9% compared to a full tensor, thus achieving higher training and inference speed as well as lower model complexity. We introduce RADE-Net, a lightweight model tailored to 3D projections of the RADE tensor. The backbone enables exploitation of low-level and high-level cues of Radar tensors with spatial and channel-attention. The decoupled detection heads predict object center-points directly in the Range-Azimuth domain and regress rotated 3D bounding boxes from rich feature maps in the cartesian scene. We evaluate the model on scenes with multiple different road users and under various weather conditions on the large-scale K-Radar dataset and achieve a 16.7% improvement compared to their baseline, as well as 6.5% improvement over current Radar-only models. Additionally, we outperform several Lidar approaches in scenarios with adverse weather conditions. The code is available under https://github.com/chr-is-tof/RADE-Net.
MAP: End-to-End Autonomous Driving with Map-Assisted Planning
Sep 17, 2025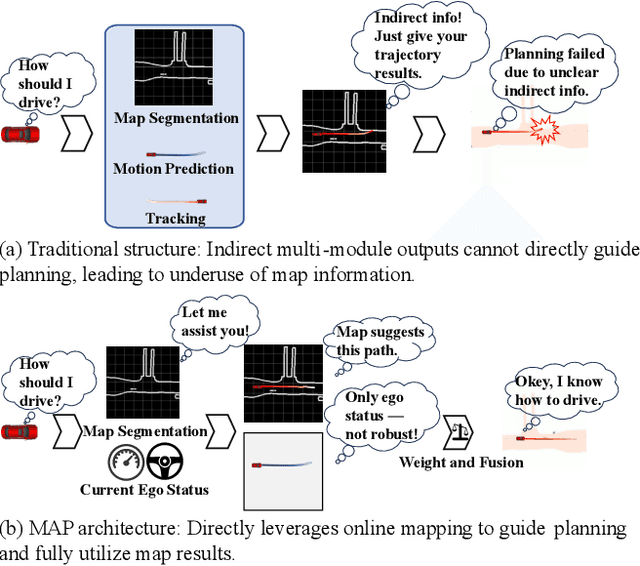


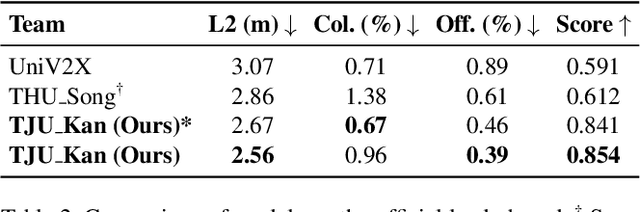
In recent years, end-to-end autonomous driving has attracted increasing attention for its ability to jointly model perception, prediction, and planning within a unified framework. However, most existing approaches underutilize the online mapping module, leaving its potential to enhance trajectory planning largely untapped. This paper proposes MAP (Map-Assisted Planning), a novel map-assisted end-to-end trajectory planning framework. MAP explicitly integrates segmentation-based map features and the current ego status through a Plan-enhancing Online Mapping module, an Ego-status-guided Planning module, and a Weight Adapter based on current ego status. Experiments conducted on the DAIR-V2X-seq-SPD dataset demonstrate that the proposed method achieves a 16.6% reduction in L2 displacement error, a 56.2% reduction in off-road rate, and a 44.5% improvement in overall score compared to the UniV2X baseline, even without post-processing. Furthermore, it achieves top ranking in Track 2 of the End-to-End Autonomous Driving through V2X Cooperation Challenge of MEIS Workshop @CVPR2025, outperforming the second-best model by 39.5% in terms of overall score. These results highlight the effectiveness of explicitly leveraging semantic map features in planning and suggest new directions for improving structure design in end-to-end autonomous driving systems. Our code is available at https://gitee.com/kymkym/map.git
Vision Foundation Model Embedding-Based Semantic Anomaly Detection
May 12, 2025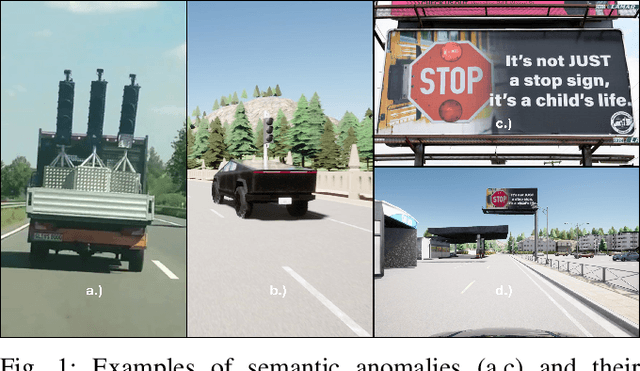



Semantic anomalies are contextually invalid or unusual combinations of familiar visual elements that can cause undefined behavior and failures in system-level reasoning for autonomous systems. This work explores semantic anomaly detection by leveraging the semantic priors of state-of-the-art vision foundation models, operating directly on the image. We propose a framework that compares local vision embeddings from runtime images to a database of nominal scenarios in which the autonomous system is deemed safe and performant. In this work, we consider two variants of the proposed framework: one using raw grid-based embeddings, and another leveraging instance segmentation for object-centric representations. To further improve robustness, we introduce a simple filtering mechanism to suppress false positives. Our evaluations on CARLA-simulated anomalies show that the instance-based method with filtering achieves performance comparable to GPT-4o, while providing precise anomaly localization. These results highlight the potential utility of vision embeddings from foundation models for real-time anomaly detection in autonomous systems.
Thermal-LiDAR Fusion for Robust Tunnel Localization in GNSS-Denied and Low-Visibility Conditions
May 06, 2025
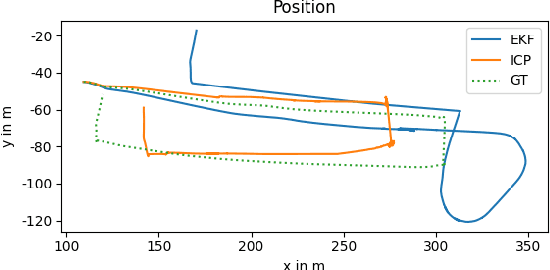
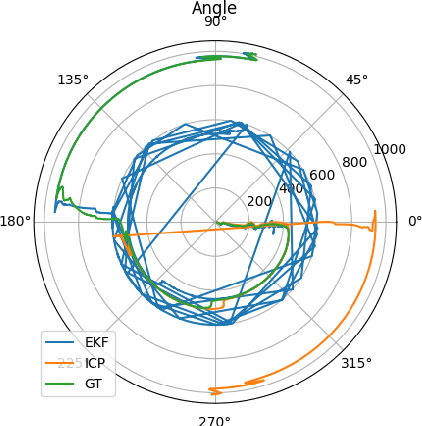
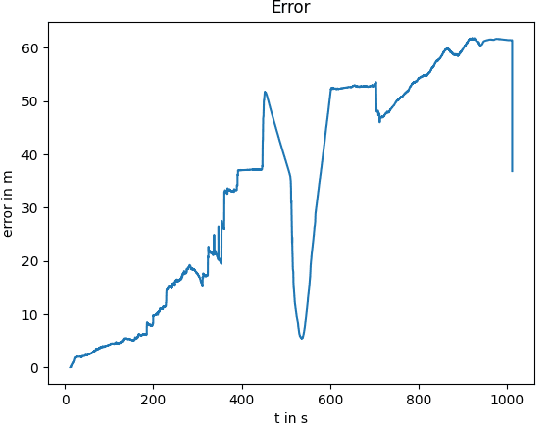
Despite significant progress in autonomous navigation, a critical gap remains in ensuring reliable localization in hazardous environments such as tunnels, urban disaster zones, and underground structures. Tunnels present a uniquely difficult scenario: they are not only prone to GNSS signal loss, but also provide little features for visual localization due to their repetitive walls and poor lighting. These conditions degrade conventional vision-based and LiDAR-based systems, which rely on distinguishable environmental features. To address this, we propose a novel sensor fusion framework that integrates a thermal camera with a LiDAR to enable robust localization in tunnels and other perceptually degraded environments. The thermal camera provides resilience in low-light or smoke conditions, while the LiDAR delivers precise depth perception and structural awareness. By combining these sensors, our framework ensures continuous and accurate localization across diverse and dynamic environments. We use an Extended Kalman Filter (EKF) to fuse multi-sensor inputs, and leverages visual odometry and SLAM (Simultaneous Localization and Mapping) techniques to process the sensor data, enabling robust motion estimation and mapping even in GNSS-denied environments. This fusion of sensor modalities not only enhances system resilience but also provides a scalable solution for cyber-physical systems in connected and autonomous vehicles (CAVs). To validate the framework, we conduct tests in a tunnel environment, simulating sensor degradation and visibility challenges. The results demonstrate that our method sustains accurate localization where standard approaches deteriorate due to the tunnels featureless geometry. The frameworks versatility makes it a promising solution for autonomous vehicles, inspection robots, and other cyber-physical systems operating in constrained, perceptually poor environments.
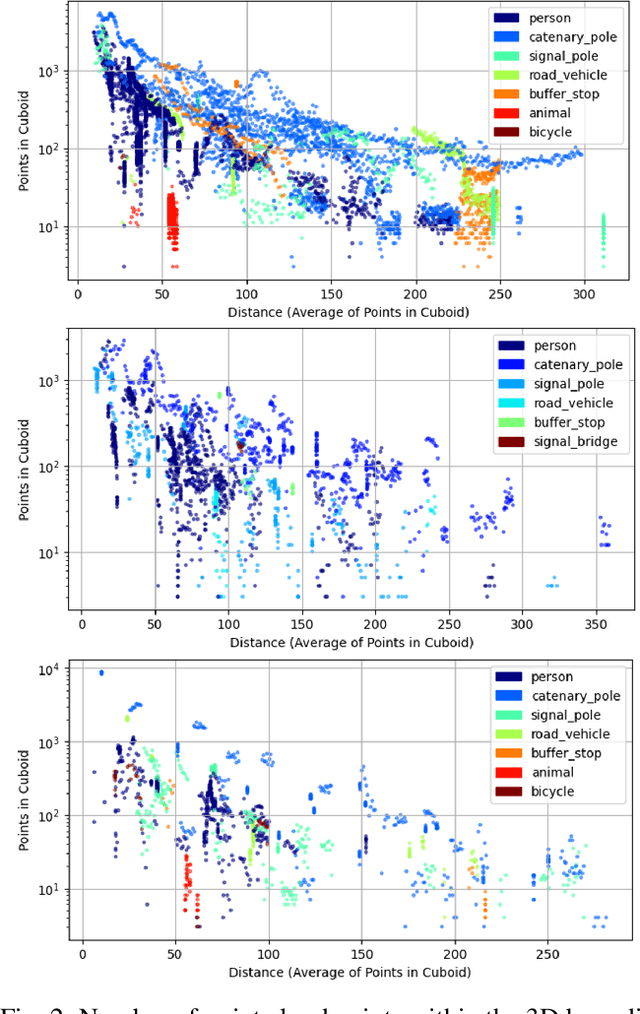
A Data-Centric Approach to 3D Semantic Segmentation of Railway Scenes
Apr 25, 2025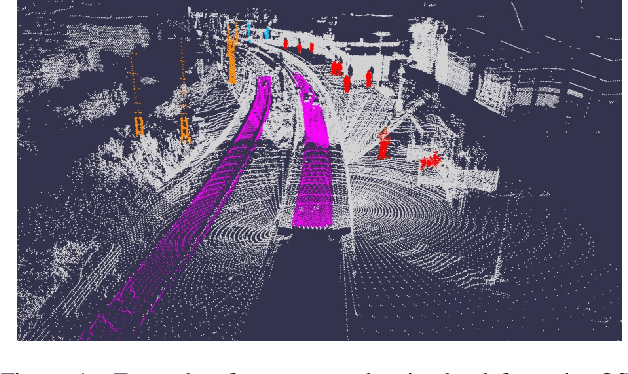


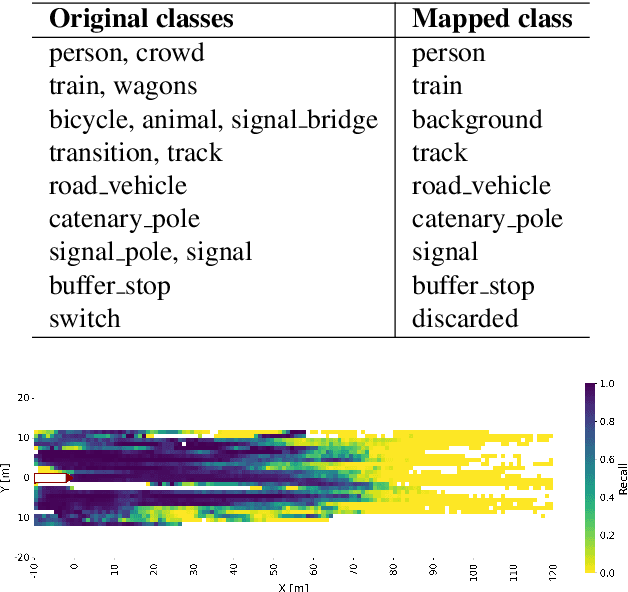
LiDAR-based semantic segmentation is critical for autonomous trains, requiring accurate predictions across varying distances. This paper introduces two targeted data augmentation methods designed to improve segmentation performance on the railway-specific OSDaR23 dataset. The person instance pasting method enhances segmentation of pedestrians at distant ranges by injecting realistic variations into the dataset. The track sparsification method redistributes point density in LiDAR scans, improving track segmentation at far distances with minimal impact on close-range accuracy. Both methods are evaluated using a state-of-the-art 3D semantic segmentation network, demonstrating significant improvements in distant-range performance while maintaining robustness in close-range predictions. We establish the first 3D semantic segmentation benchmark for OSDaR23, demonstrating the potential of data-centric approaches to address railway-specific challenges in autonomous train perception.
LiDAR-Guided Monocular 3D Object Detection for Long-Range Railway Monitoring
Apr 25, 2025


Railway systems, particularly in Germany, require high levels of automation to address legacy infrastructure challenges and increase train traffic safely. A key component of automation is robust long-range perception, essential for early hazard detection, such as obstacles at level crossings or pedestrians on tracks. Unlike automotive systems with braking distances of ~70 meters, trains require perception ranges exceeding 1 km. This paper presents an deep-learning-based approach for long-range 3D object detection tailored for autonomous trains. The method relies solely on monocular images, inspired by the Faraway-Frustum approach, and incorporates LiDAR data during training to improve depth estimation. The proposed pipeline consists of four key modules: (1) a modified YOLOv9 for 2.5D object detection, (2) a depth estimation network, and (3-4) dedicated short- and long-range 3D detection heads. Evaluations on the OSDaR23 dataset demonstrate the effectiveness of the approach in detecting objects up to 250 meters. Results highlight its potential for railway automation and outline areas for future improvement.
WS-DETR: Robust Water Surface Object Detection through Vision-Radar Fusion with Detection Transformer
Apr 10, 2025Robust object detection for Unmanned Surface Vehicles (USVs) in complex water environments is essential for reliable navigation and operation. Specifically, water surface object detection faces challenges from blurred edges and diverse object scales. Although vision-radar fusion offers a feasible solution, existing approaches suffer from cross-modal feature conflicts, which negatively affect model robustness. To address this problem, we propose a robust vision-radar fusion model WS-DETR. In particular, we first introduce a Multi-Scale Edge Information Integration (MSEII) module to enhance edge perception and a Hierarchical Feature Aggregator (HiFA) to boost multi-scale object detection in the encoder. Then, we adopt self-moving point representations for continuous convolution and residual connection to efficiently extract irregular features under the scenarios of irregular point cloud data. To further mitigate cross-modal conflicts, an Adaptive Feature Interactive Fusion (AFIF) module is introduced to integrate visual and radar features through geometric alignment and semantic fusion. Extensive experiments on the WaterScenes dataset demonstrate that WS-DETR achieves state-of-the-art (SOTA) performance, maintaining its superiority even under adverse weather and lighting conditions.
Attention-Augmented Inverse Reinforcement Learning with Graph Convolutions for Multi-Agent Task Allocation
Apr 08, 2025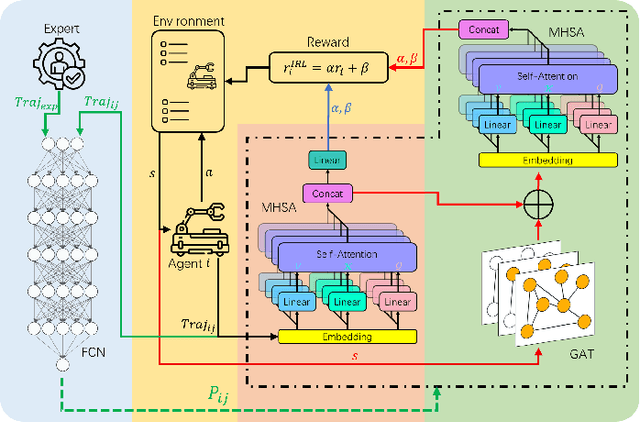
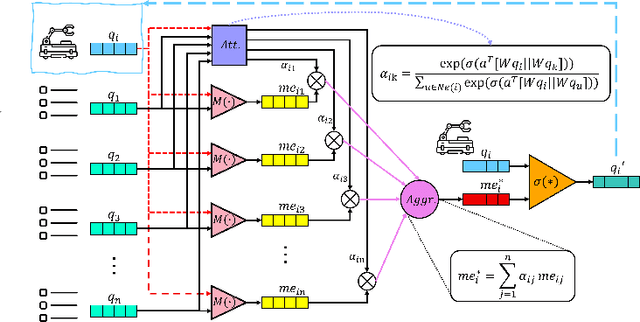
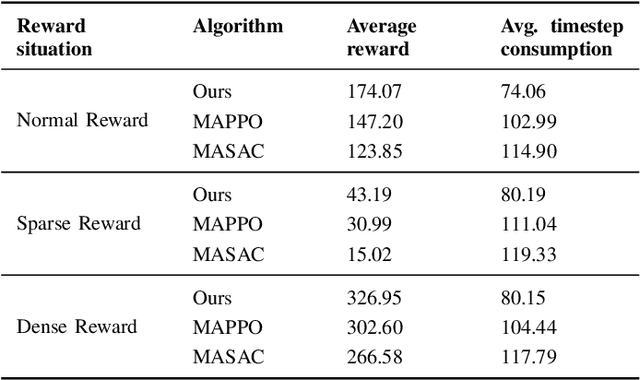
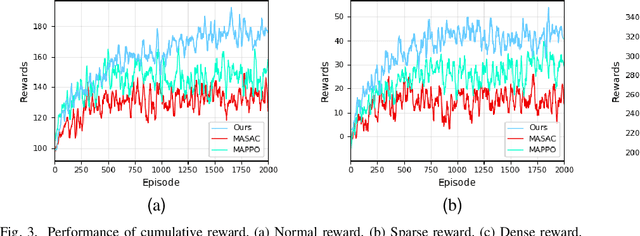
Multi-agent task allocation (MATA) plays a vital role in cooperative multi-agent systems, with significant implications for applications such as logistics, search and rescue, and robotic coordination. Although traditional deep reinforcement learning (DRL) methods have been shown to be promising, their effectiveness is hindered by a reliance on manually designed reward functions and inefficiencies in dynamic environments. In this paper, an inverse reinforcement learning (IRL)-based framework is proposed, in which multi-head self-attention (MHSA) and graph attention mechanisms are incorporated to enhance reward function learning and task execution efficiency. Expert demonstrations are utilized to infer optimal reward densities, allowing dependence on handcrafted designs to be reduced and adaptability to be improved. Extensive experiments validate the superiority of the proposed method over widely used multi-agent reinforcement learning (MARL) algorithms in terms of both cumulative rewards and task execution efficiency.