 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Data-Centric Approach to 3D Semantic Segmentation of Railway Scenes
Apr 25, 2025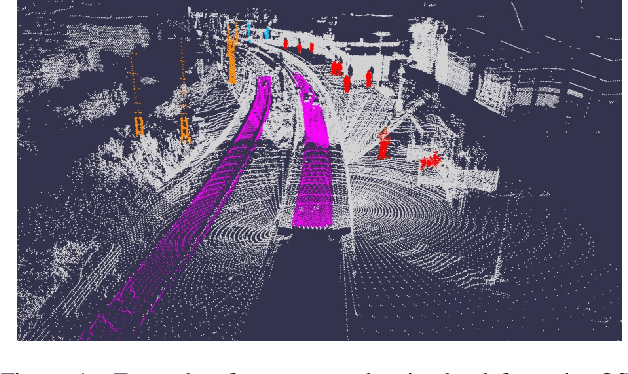


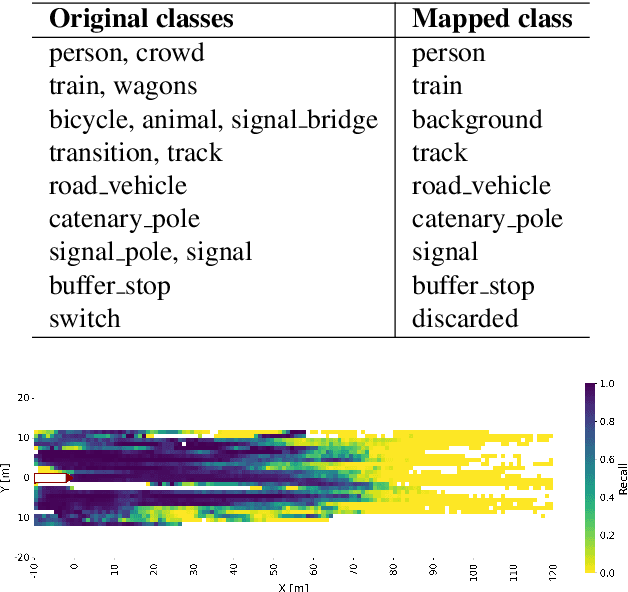
LiDAR-based semantic segmentation is critical for autonomous trains, requiring accurate predictions across varying distances. This paper introduces two targeted data augmentation methods designed to improve segmentation performance on the railway-specific OSDaR23 dataset. The person instance pasting method enhances segmentation of pedestrians at distant ranges by injecting realistic variations into the dataset. The track sparsification method redistributes point density in LiDAR scans, improving track segmentation at far distances with minimal impact on close-range accuracy. Both methods are evaluated using a state-of-the-art 3D semantic segmentation network, demonstrating significant improvements in distant-range performance while maintaining robustness in close-range predictions. We establish the first 3D semantic segmentation benchmark for OSDaR23, demonstrating the potential of data-centric approaches to address railway-specific challenges in autonomous train perception.
LiDAR-Guided Monocular 3D Object Detection for Long-Range Railway Monitoring
Apr 25, 2025
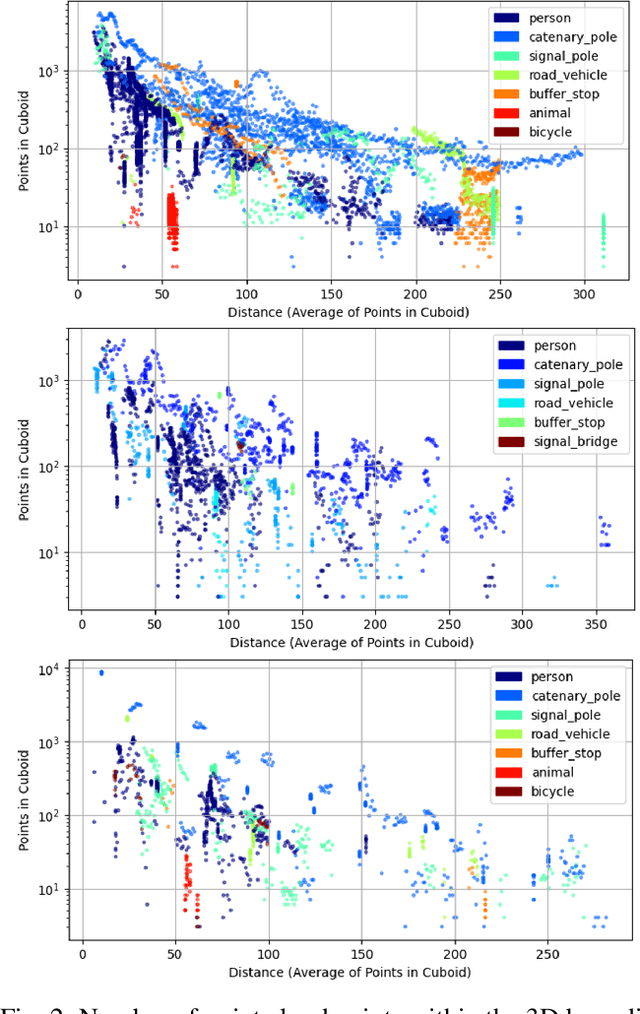


Railway systems, particularly in Germany, require high levels of automation to address legacy infrastructure challenges and increase train traffic safely. A key component of automation is robust long-range perception, essential for early hazard detection, such as obstacles at level crossings or pedestrians on tracks. Unlike automotive systems with braking distances of ~70 meters, trains require perception ranges exceeding 1 km. This paper presents an deep-learning-based approach for long-range 3D object detection tailored for autonomous trains. The method relies solely on monocular images, inspired by the Faraway-Frustum approach, and incorporates LiDAR data during training to improve depth estimation. The proposed pipeline consists of four key modules: (1) a modified YOLOv9 for 2.5D object detection, (2) a depth estimation network, and (3-4) dedicated short- and long-range 3D detection heads. Evaluations on the OSDaR23 dataset demonstrate the effectiveness of the approach in detecting objects up to 250 meters. Results highlight its potential for railway automation and outline areas for future improvement.
Deep Learning-Driven State Correction: A Hybrid Architecture for Radar-Based Dynamic Occupancy Grid Mapping
May 22, 2024
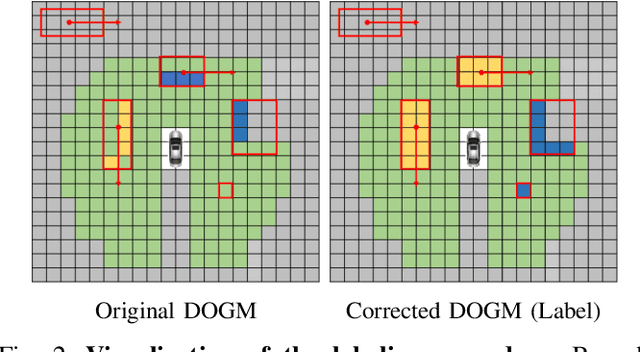
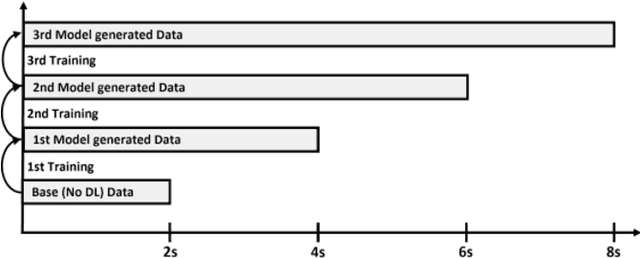
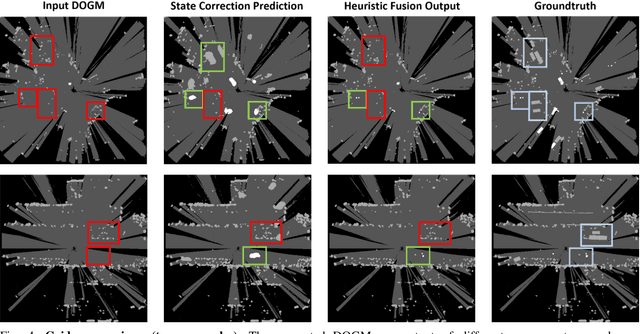
This paper introduces a novel hybrid architecture that enhances radar-based Dynamic Occupancy Grid Mapping (DOGM) for autonomous vehicles, integrating deep learning for state-classification. Traditional radar-based DOGM often faces challenges in accurately distinguishing between static and dynamic objects. Our approach addresses this limitation by introducing a neural network-based DOGM state correction mechanism, designed as a semantic segmentation task, to refine the accuracy of the occupancy grid. Additionally a heuristic fusion approach is proposed which allows to enhance performance without compromising on safety. We extensively evaluate this hybrid architecture on the NuScenes Dataset, focusing on its ability to improve dynamic object detection as well grid quality. The results show clear improvements in the detection capabilities of dynamic objects, highlighting the effectiveness of the deep learning-enhanced state correction in radar-based DOGM.