 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePattern based learning and optimisation through pricing for bin packing problem
Aug 27, 2024



As a popular form of knowledge and experience, patterns and their identification have been critical tasks in most data mining applications. However, as far as we are aware, no study has systematically examined the dynamics of pattern values and their reuse under varying conditions. We argue that when problem conditions such as the distributions of random variables change, the patterns that performed well in previous circumstances may become less effective and adoption of these patterns would result in sub-optimal solutions. In response, we make a connection between data mining and the duality theory in operations research and propose a novel scheme to efficiently identify patterns and dynamically quantify their values for each specific condition. Our method quantifies the value of patterns based on their ability to satisfy stochastic constraints and their effects on the objective value, allowing high-quality patterns and their combinations to be detected. We use the online bin packing problem to evaluate the effectiveness of the proposed scheme and illustrate the online packing procedure with the guidance of patterns that address the inherent uncertainty of the problem. Results show that the proposed algorithm significantly outperforms the state-of-the-art methods. We also analysed in detail the distinctive features of the proposed methods that lead to performance improvement and the special cases where our method can be further improved.
AcousticFusion: Fusing Sound Source Localization to Visual SLAM in Dynamic Environments
Aug 03, 2021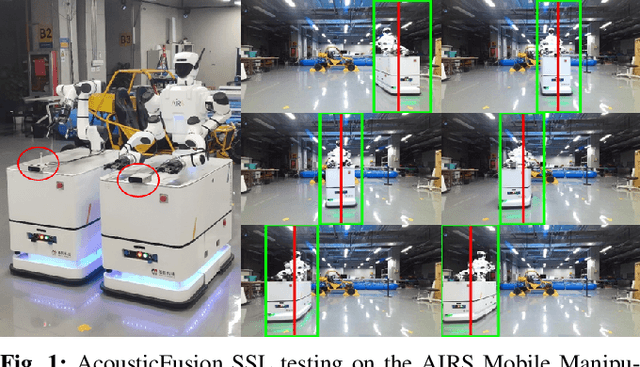
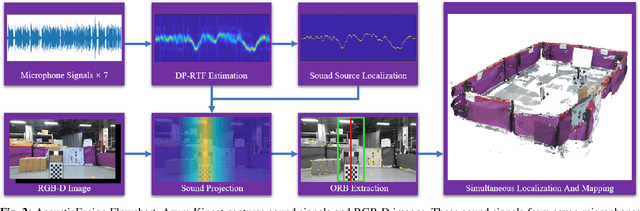
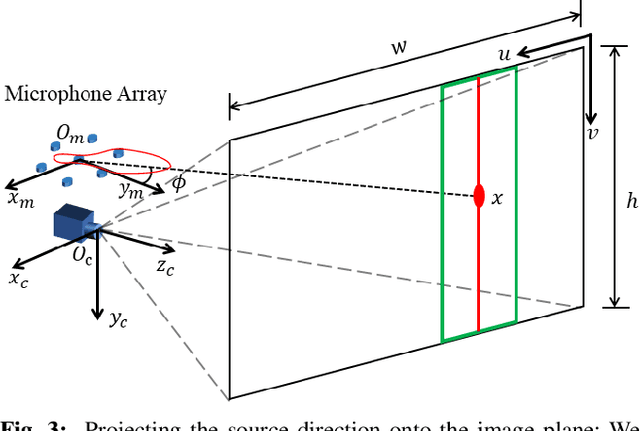
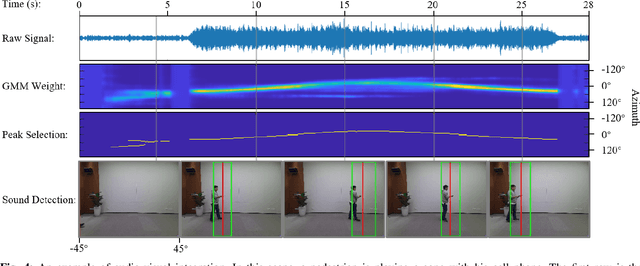
Dynamic objects in the environment, such as people and other agents, lead to challenges for existing simultaneous localization and mapping (SLAM) approaches. To deal with dynamic environments, computer vision researchers usually apply some learning-based object detectors to remove these dynamic objects. However, these object detectors are computationally too expensive for mobile robot on-board processing. In practical applications, these objects output noisy sounds that can be effectively detected by on-board sound source localization. The directional information of the sound source object can be efficiently obtained by direction of sound arrival (DoA) estimation, but depth estimation is difficult. Therefore, in this paper, we propose a novel audio-visual fusion approach that fuses sound source direction into the RGB-D image and thus removes the effect of dynamic obstacles on the multi-robot SLAM system. Experimental results of multi-robot SLAM in different dynamic environments show that the proposed method uses very small computational resources to obtain very stable self-localization results.
PoseFusion2: Simultaneous Background Reconstruction and Human Shape Recovery in Real-time
Aug 02, 2021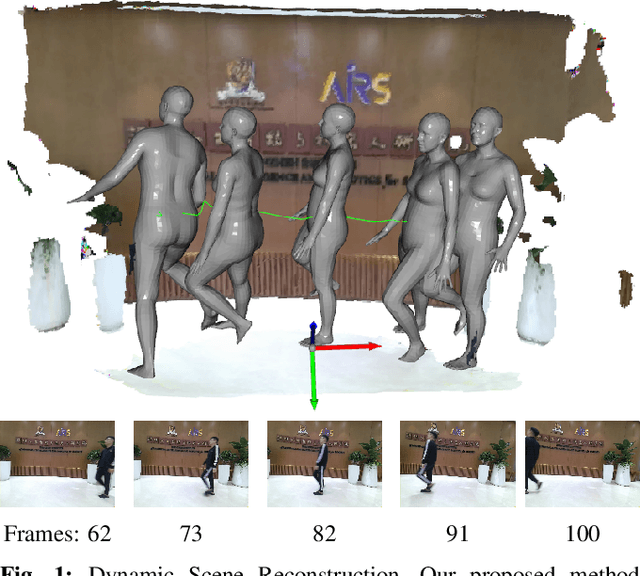
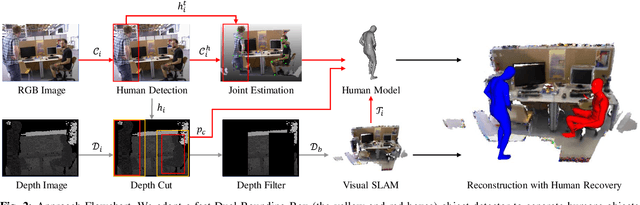
Dynamic environments that include unstructured moving objects pose a hard problem for Simultaneous Localization and Mapping (SLAM) performance. The motion of rigid objects can be typically tracked by exploiting their texture and geometric features. However, humans moving in the scene are often one of the most important, interactive targets - they are very hard to track and reconstruct robustly due to non-rigid shapes. In this work, we present a fast, learning-based human object detector to isolate the dynamic human objects and realise a real-time dense background reconstruction framework. We go further by estimating and reconstructing the human pose and shape. The final output environment maps not only provide the dense static backgrounds but also contain the dynamic human meshes and their trajectories. Our Dynamic SLAM system runs at around 26 frames per second (fps) on GPUs, while additionally turning on accurate human pose estimation can be executed at up to 10 fps.
Analytics and Machine Learning in Vehicle Routing Research
Feb 19, 2021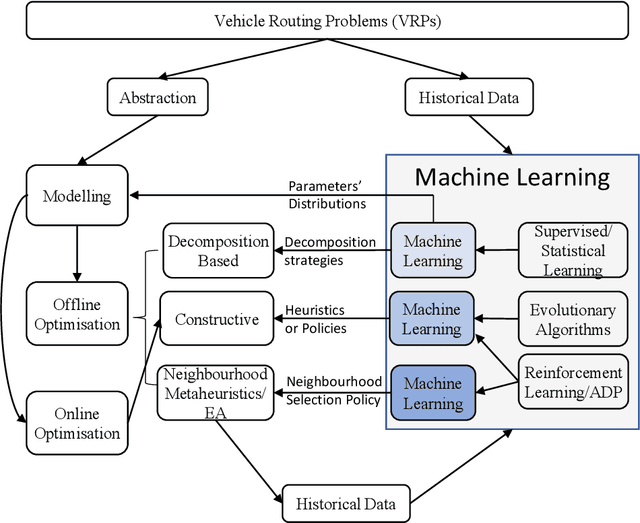
The Vehicle Routing Problem (VRP) is one of the most intensively studied combinatorial optimisation problems for which numerous models and algorithms have been proposed. To tackle the complexities, uncertainties and dynamics involved in real-world VRP applications, Machine Learning (ML) methods have been used in combination with analytical approaches to enhance problem formulations and algorithmic performance across different problem solving scenarios. However, the relevant papers are scattered in several traditional research fields with very different, sometimes confusing, terminologies. This paper presents a first, comprehensive review of hybrid methods that combine analytical techniques with ML tools in addressing VRP problems. Specifically, we review the emerging research streams on ML-assisted VRP modelling and ML-assisted VRP optimisation. We conclude that ML can be beneficial in enhancing VRP modelling, and improving the performance of algorithms for both online and offline VRP optimisations. Finally, challenges and future opportunities of VRP research are discussed.
FlowFusion: Dynamic Dense RGB-D SLAM Based on Optical Flow
Mar 11, 2020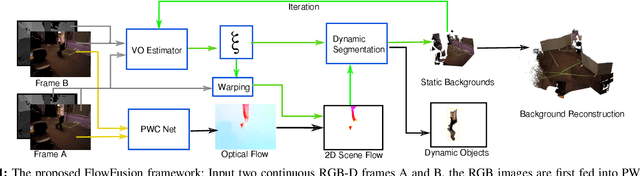
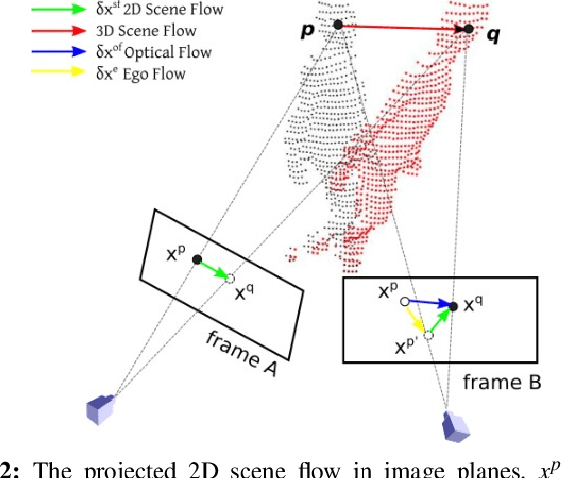

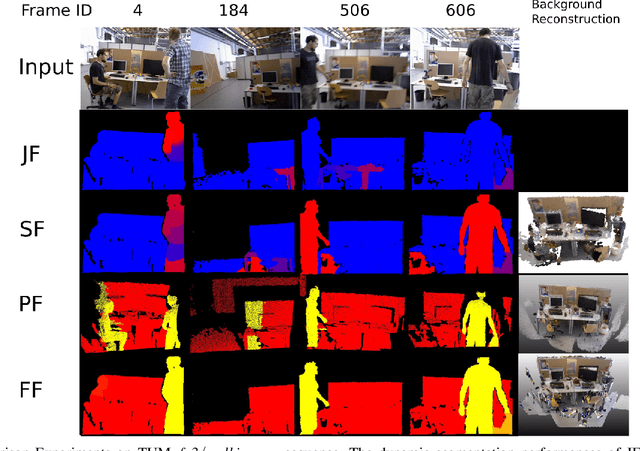
Dynamic environments are challenging for visual SLAM since the moving objects occlude the static environment features and lead to wrong camera motion estimation. In this paper, we present a novel dense RGB-D SLAM solution that simultaneously accomplishes the dynamic/static segmentation and camera ego-motion estimation as well as the static background reconstructions. Our novelty is using optical flow residuals to highlight the dynamic semantics in the RGB-D point clouds and provide more accurate and efficient dynamic/static segmentation for camera tracking and background reconstruction. The dense reconstruction results on public datasets and real dynamic scenes indicate that the proposed approach achieved accurate and efficient performances in both dynamic and static environments compared to state-of-the-art approaches.