 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnd-to-end Generative Spatial-Temporal Ultrasonic Odometry and Mapping Framework
Dec 23, 2024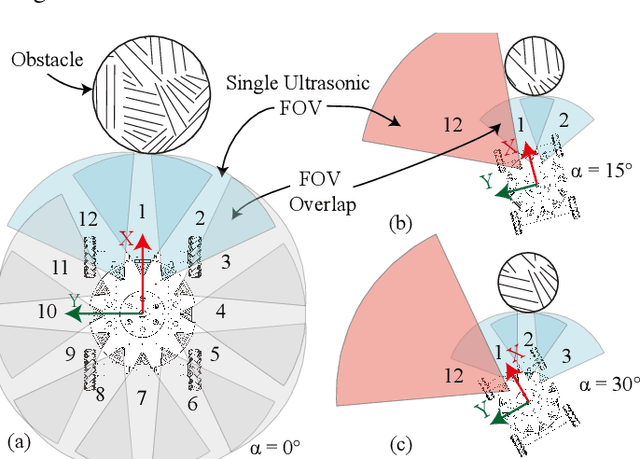
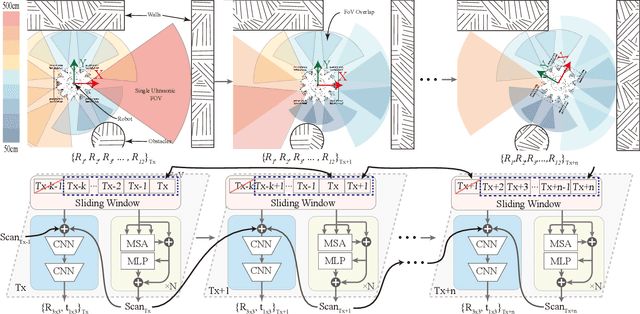
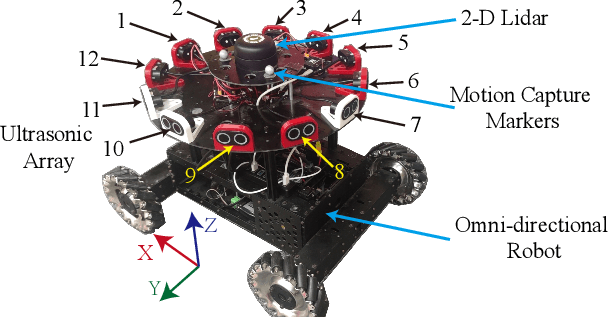

Performing simultaneous localization and mapping (SLAM) in low-visibility conditions, such as environments filled with smoke, dust and transparent objets, has long been a challenging task. Sensors like cameras and Light Detection and Ranging (LiDAR) are significantly limited under these conditions, whereas ultrasonic sensors offer a more robust alternative. However, the low angular resolution, slow update frequency, and limited detection accuracy of ultrasonic sensors present barriers for SLAM. In this work, we propose a novel end-to-end generative ultrasonic SLAM framework. This framework employs a sensor array with overlapping fields of view, leveraging the inherently low angular resolution of ultrasonic sensors to implicitly encode spatial features in conjunction with the robot's motion. Consecutive time frame data is processed through a sliding window mechanism to capture temporal features. The spatiotemporally encoded sensor data is passed through multiple modules to generate dense scan point clouds and robot pose transformations for map construction and odometry. The main contributions of this work include a novel ultrasonic sensor array that spatiotemporally encodes the surrounding environment, and an end-to-end generative SLAM framework that overcomes the inherent defects of ultrasonic sensors. Several real-world experiments demonstrate the feasibility and robustness of the proposed framework.
Fast One-Stage Unsupervised Domain Adaptive Person Search
May 05, 2024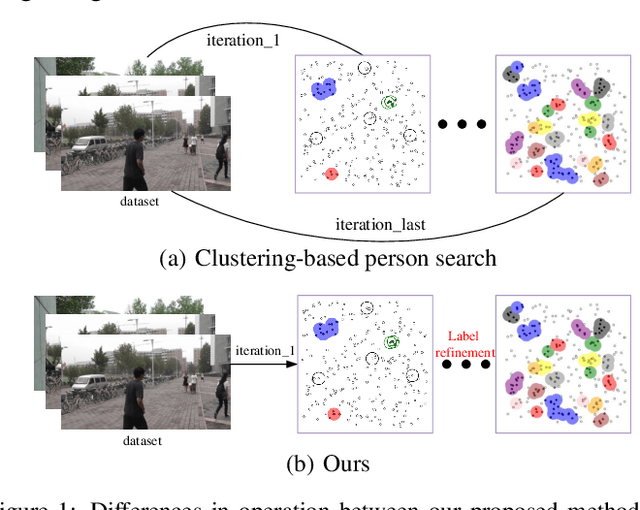

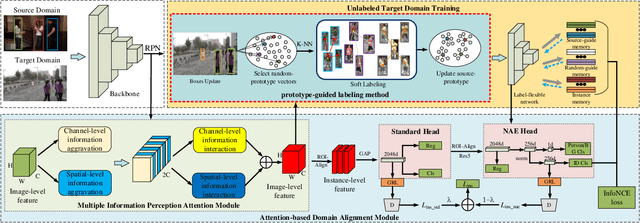
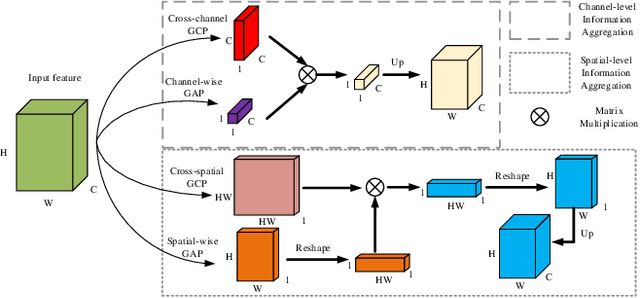
Unsupervised person search aims to localize a particular target person from a gallery set of scene images without annotations, which is extremely challenging due to the unexpected variations of the unlabeled domains. However, most existing methods dedicate to developing multi-stage models to adapt domain variations while using clustering for iterative model training, which inevitably increases model complexity. To address this issue, we propose a Fast One-stage Unsupervised person Search (FOUS) which complementary integrates domain adaptaion with label adaptaion within an end-to-end manner without iterative clustering. To minimize the domain discrepancy, FOUS introduced an Attention-based Domain Alignment Module (ADAM) which can not only align various domains for both detection and ReID tasks but also construct an attention mechanism to reduce the adverse impacts of low-quality candidates resulting from unsupervised detection. Moreover, to avoid the redundant iterative clustering mode, FOUS adopts a prototype-guided labeling method which minimizes redundant correlation computations for partial samples and assigns noisy coarse label groups efficiently. The coarse label groups will be continuously refined via label-flexible training network with an adaptive selection strategy. With the adapted domains and labels, FOUS can achieve the state-of-the-art (SOTA) performance on two benchmark datasets, CUHK-SYSU and PRW. The code is available at https://github.com/whbdmu/FOUS.
Domain Adaptive Person Search via GAN-based Scene Synthesis for Cross-scene Videos
Aug 08, 2023



Person search has recently been a challenging task in the computer vision domain, which aims to search specific pedestrians from real cameras.Nevertheless, most surveillance videos comprise only a handful of images of each pedestrian, which often feature identical backgrounds and clothing. Hence, it is difficult to learn more discriminative features for person search in real scenes. To tackle this challenge, we draw on Generative Adversarial Networks (GAN) to synthesize data from surveillance videos. GAN has thrived in computer vision problems because it produces high-quality images efficiently. We merely alter the popular Fast R-CNN model, which is capable of processing videos and yielding accurate detection outcomes. In order to appropriately relieve the pressure brought by the two-stage model, we design an Assisted-Identity Query Module (AIDQ) to provide positive images for the behind part. Besides, the proposed novel GAN-based Scene Synthesis model that can synthesize high-quality cross-id person images for person search tasks. In order to facilitate the feature learning of the GAN-based Scene Synthesis model, we adopt an online learning strategy that collaboratively learns the synthesized images and original images. Extensive experiments on two widely used person search benchmarks, CUHK-SYSU and PRW, have shown that our method has achieved great performance, and the extensive ablation study further justifies our GAN-synthetic data can effectively increase the variability of the datasets and be more realistic.
Analytics and Machine Learning in Vehicle Routing Research
Feb 19, 2021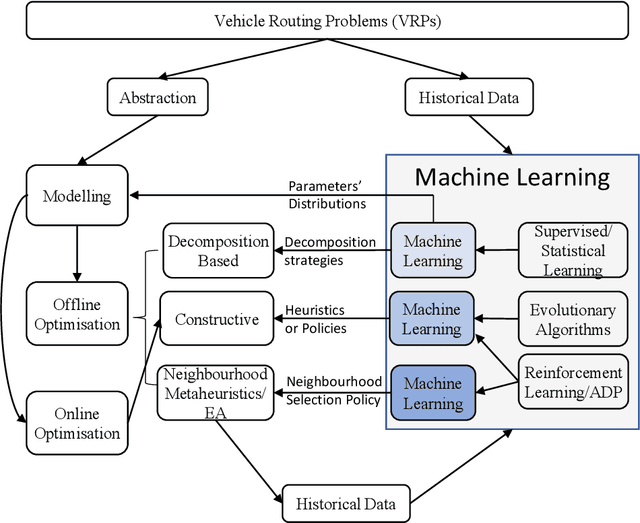
The Vehicle Routing Problem (VRP) is one of the most intensively studied combinatorial optimisation problems for which numerous models and algorithms have been proposed. To tackle the complexities, uncertainties and dynamics involved in real-world VRP applications, Machine Learning (ML) methods have been used in combination with analytical approaches to enhance problem formulations and algorithmic performance across different problem solving scenarios. However, the relevant papers are scattered in several traditional research fields with very different, sometimes confusing, terminologies. This paper presents a first, comprehensive review of hybrid methods that combine analytical techniques with ML tools in addressing VRP problems. Specifically, we review the emerging research streams on ML-assisted VRP modelling and ML-assisted VRP optimisation. We conclude that ML can be beneficial in enhancing VRP modelling, and improving the performance of algorithms for both online and offline VRP optimisations. Finally, challenges and future opportunities of VRP research are discussed.