 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnforcing Task-Specified Compliance Bounds for Humanoids via Anisotropic Lipschitz-Constrained Policies
Mar 17, 2026Reinforcement learning (RL) has demonstrated substantial potential for humanoid bipedal locomotion and the control of complex motions. To cope with oscillations and impacts induced by environmental interactions, compliant control is widely regarded as an effective remedy. However, the model-free nature of RL makes it difficult to impose task-specified and quantitatively verifiable compliance objectives, and classical model-based stiffness designs are not directly applicable. Lipschitz-Constrained Policies (LCP), which regularize the local sensitivity of a policy via gradient penalties, have recently been used to smooth humanoid motions. Nevertheless, existing LCP-based methods typically employ a single scalar Lipschitz budget and lack an explicit connection to physically meaningful compliance specifications in real-world systems. In this study, we propose an anisotropic Lipschitz-constrained policy (ALCP) that maps a task-space stiffness upper bound to a state-dependent Lipschitz-style constraint on the policy Jacobian. The resulting constraint is enforced during RL training via a hinge-squared spectral-norm penalty, preserving physical interpretability while enabling direction-dependent compliance. Experiments on humanoid robots show that ALCP improves locomotion stability and impact robustness, while reducing oscillations and energy usage.
Choose What to Observe: Task-Aware Semantic-Geometric Representations for Visuomotor Policy
Mar 09, 2026Visuomotor policies learned from demonstrations often overfit to nuisance visual factors in raw RGB observations, resulting in brittle behavior under appearance shifts such as background changes and object recoloring. We propose a task-aware observation interface that canonicalizes visual input into a shared representation, improving robustness to out-of-distribution (OOD) appearance changes without modifying or fine-tuning the policy. Given an RGB image and an open-vocabulary specification of task-relevant entities, we use SAM3 to segment the target object and robot/gripper. We construct an L0 observation by repainting segmented entities with predefined semantic colors on a constant background. For tasks requiring stronger geometric cues, we further inject monocular depth from Depth Anything 3 into the segmented regions via depth-guided overwrite, yielding a unified semantic--geometric observation (L1) that remains a standard 3-channel, image-like input. We evaluate on RoboMimic (Lift), ManiSkill YCB grasping under clutter, four RLBench tasks under controlled appearance shifts, and two real-world Franka tasks (ReachX and CloseCabinet). Across benchmarks and policy backbones (Flow Matching Policy and SmolVLA), our interface preserves in-distribution performance while substantially improving robustness under OOD visual shifts.
Imagination at Inference: Synthesizing In-Hand Views for Robust Visuomotor Policy Inference
Sep 19, 2025Visual observations from different viewpoints can significantly influence the performance of visuomotor policies in robotic manipulation. Among these, egocentric (in-hand) views often provide crucial information for precise control. However, in some applications, equipping robots with dedicated in-hand cameras may pose challenges due to hardware constraints, system complexity, and cost. In this work, we propose to endow robots with imaginative perception - enabling them to 'imagine' in-hand observations from agent views at inference time. We achieve this via novel view synthesis (NVS), leveraging a fine-tuned diffusion model conditioned on the relative pose between the agent and in-hand views cameras. Specifically, we apply LoRA-based fine-tuning to adapt a pretrained NVS model (ZeroNVS) to the robotic manipulation domain. We evaluate our approach on both simulation benchmarks (RoboMimic and MimicGen) and real-world experiments using a Unitree Z1 robotic arm for a strawberry picking task. Results show that synthesized in-hand views significantly enhance policy inference, effectively recovering the performance drop caused by the absence of real in-hand cameras. Our method offers a scalable and hardware-light solution for deploying robust visuomotor policies, highlighting the potential of imaginative visual reasoning in embodied agents.
Towards Safe Imitation Learning via Potential Field-Guided Flow Matching
Aug 12, 2025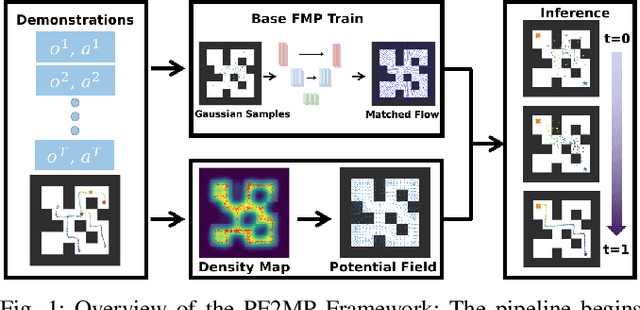
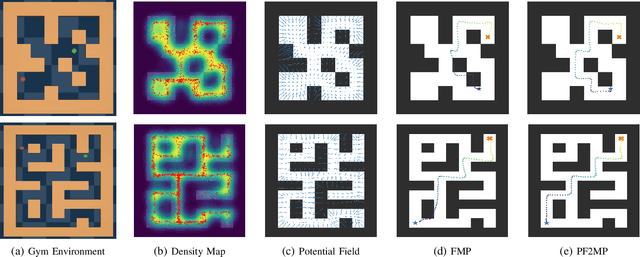
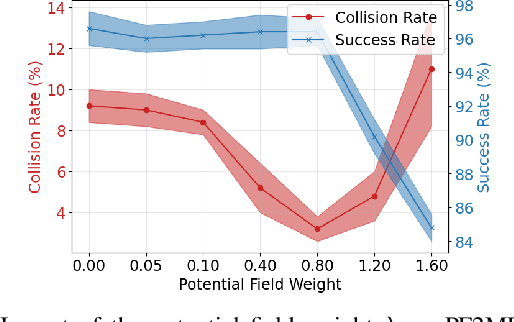

Deep generative models, particularly diffusion and flow matching models, have recently shown remarkable potential in learning complex policies through imitation learning. However, the safety of generated motions remains overlooked, particularly in complex environments with inherent obstacles. In this work, we address this critical gap by proposing Potential Field-Guided Flow Matching Policy (PF2MP), a novel approach that simultaneously learns task policies and extracts obstacle-related information, represented as a potential field, from the same set of successful demonstrations. During inference, PF2MP modulates the flow matching vector field via the learned potential field, enabling safe motion generation. By leveraging these complementary fields, our approach achieves improved safety without compromising task success across diverse environments, such as navigation tasks and robotic manipulation scenarios. We evaluate PF2MP in both simulation and real-world settings, demonstrating its effectiveness in task space and joint space control. Experimental results demonstrate that PF2MP enhances safety, achieving a significant reduction of collisions compared to baseline policies. This work paves the way for safer motion generation in unstructured and obstaclerich environments.
SplitFusion: Simultaneous Tracking and Mapping for Non-Rigid Scenes
Jul 04, 2020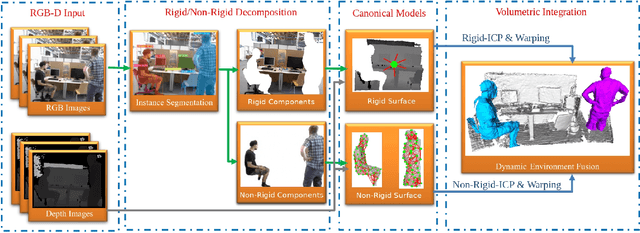
We present SplitFusion, a novel dense RGB-D SLAM framework that simultaneously performs tracking and dense reconstruction for both rigid and non-rigid components of the scene. SplitFusion first adopts deep learning based semantic instant segmentation technique to split the scene into rigid or non-rigid surfaces. The split surfaces are independently tracked via rigid or non-rigid ICP and reconstructed through incremental depth map fusion. Experimental results show that the proposed approach can provide not only accurate environment maps but also well-reconstructed non-rigid targets, e.g. the moving humans.
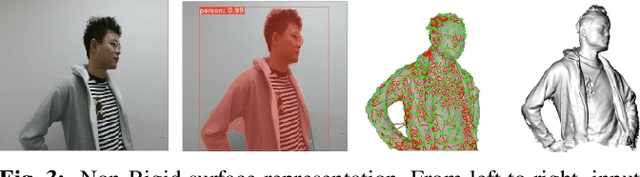
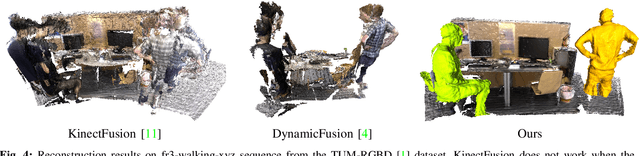
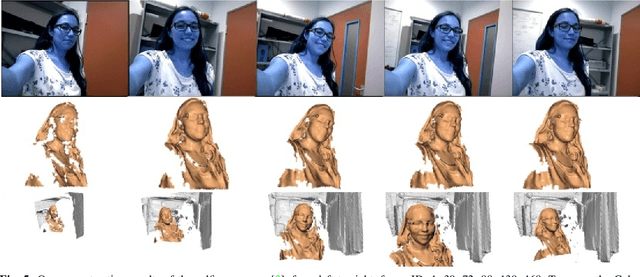
FlowFusion: Dynamic Dense RGB-D SLAM Based on Optical Flow
Mar 11, 2020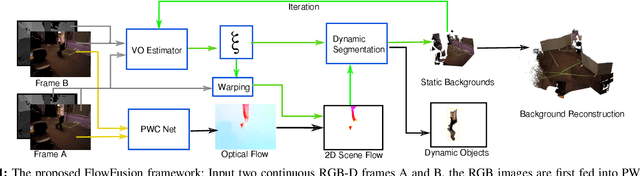
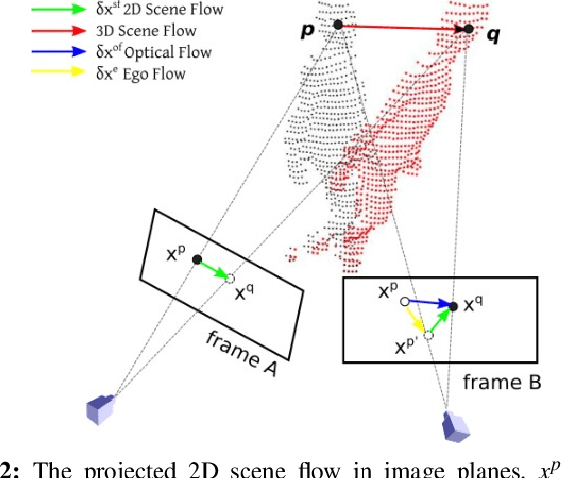

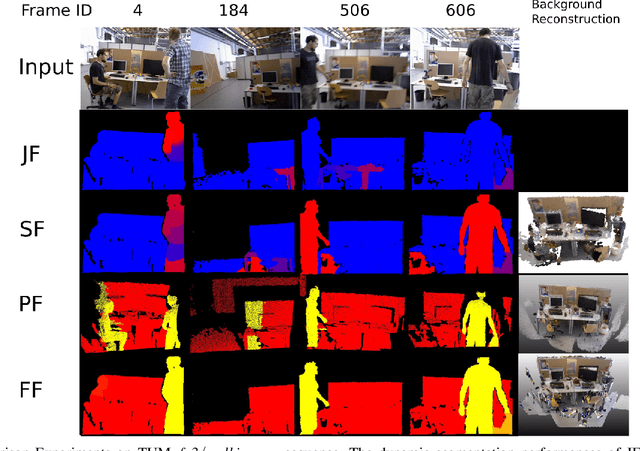
Dynamic environments are challenging for visual SLAM since the moving objects occlude the static environment features and lead to wrong camera motion estimation. In this paper, we present a novel dense RGB-D SLAM solution that simultaneously accomplishes the dynamic/static segmentation and camera ego-motion estimation as well as the static background reconstructions. Our novelty is using optical flow residuals to highlight the dynamic semantics in the RGB-D point clouds and provide more accurate and efficient dynamic/static segmentation for camera tracking and background reconstruction. The dense reconstruction results on public datasets and real dynamic scenes indicate that the proposed approach achieved accurate and efficient performances in both dynamic and static environments compared to state-of-the-art approaches.
Synergetic Reconstruction from 2D Pose and 3D Motion for Wide-Space Multi-Person Video Motion Capture in the Wild
Jan 16, 2020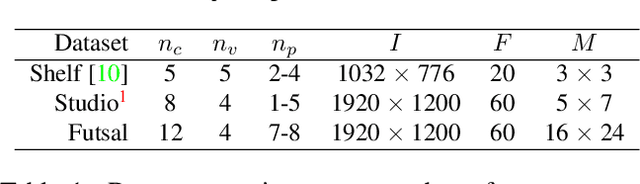
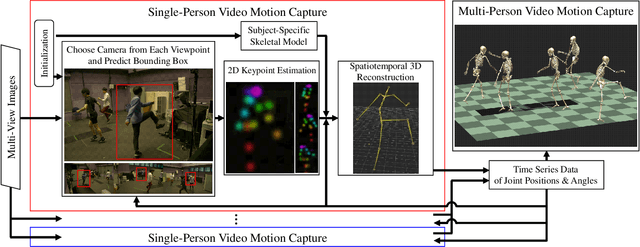
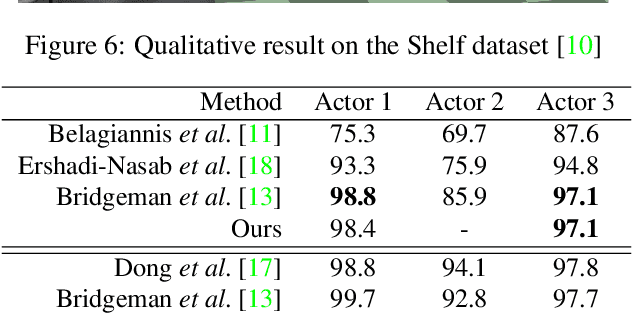
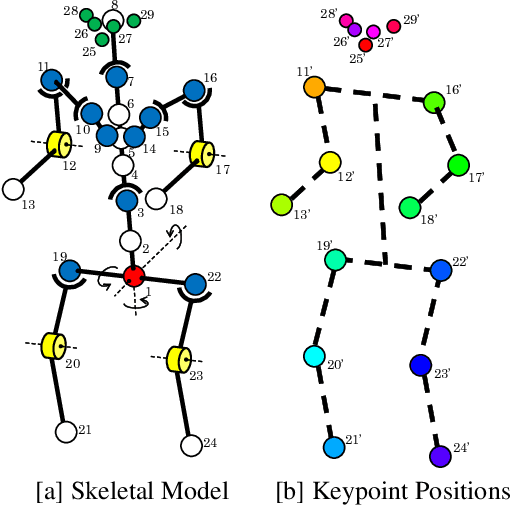
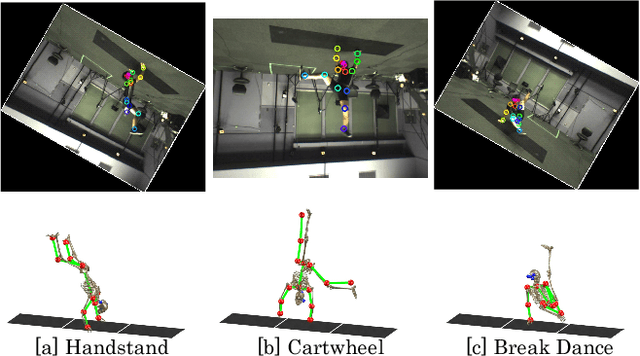
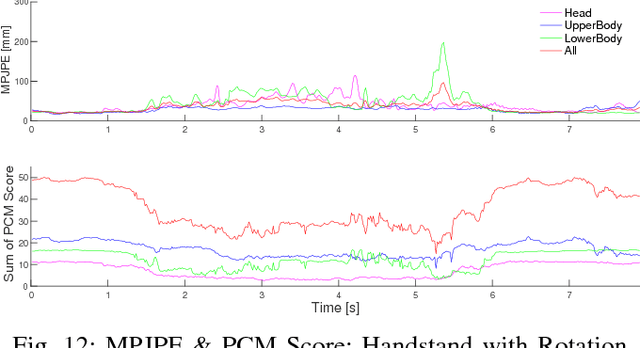
Although many studies have been made on markerless motion capture, it has not been applied to real sports or concerts. In this paper, we propose a markerless motion capture method with spatiotemporal accuracy and smoothness from multiple cameras, even in wide and multi-person environments. The key idea is predicting each person's 3D pose and determining the bounding box of multi-camera images small enough. This prediction and spatiotemporal filtering based on human skeletal structure eases 3D reconstruction of the person and yields accuracy. The accurate 3D reconstruction is then used to predict the bounding box of each camera image in the next frame. This is a feedback from 3D motion to 2D pose, and provides a synergetic effect to the total performance of video motion capture. We demonstrate the method using various datasets and a real sports field. The experimental results show the mean per joint position error was 31.6mm and the percentage of correct parts was 99.3% under five people moving dynamically, with satisfying the range of motion. Video demonstration, datasets, and additional materials are posted on our project page.
Video Motion Capture from the Part Confidence Maps of Multi-Camera Images by Spatiotemporal Filtering Using the Human Skeletal Model
Dec 10, 2019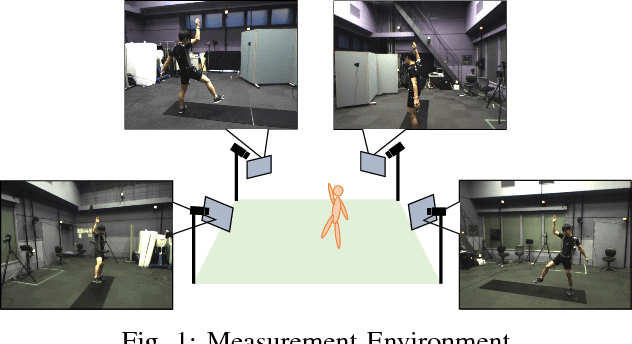
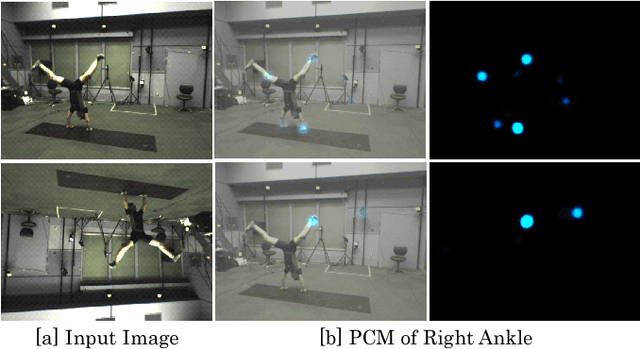
This paper discusses video motion capture, namely, 3D reconstruction of human motion from multi-camera images. After the Part Confidence Maps are computed from each camera image, the proposed spatiotemporal filter is applied to deliver the human motion data with accuracy and smoothness for human motion analysis. The spatiotemporal filter uses the human skeleton and mixes temporal smoothing in two-time inverse kinematics computations. The experimental results show that the mean per joint position error was 26.1mm for regular motions and 38.8mm for inverted motions.
Admissible Velocity Propagation : Beyond Quasi-Static Path Planning for High-Dimensional Robots
Sep 30, 2016
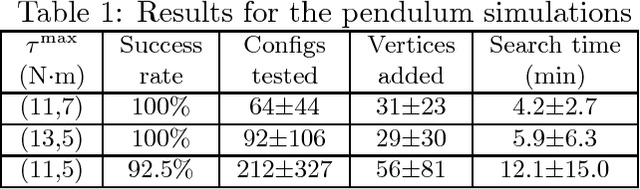

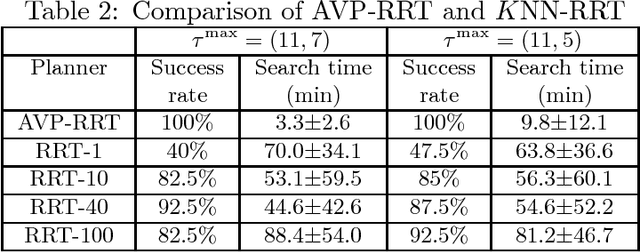
Path-velocity decomposition is an intuitive yet powerful approach to address the complexity of kinodynamic motion planning. The difficult trajectory planning problem is solved in two separate, simpler, steps: first, find a path in the configuration space that satisfies the geometric constraints (path planning), and second, find a time-parameterization of that path satisfying the kinodynamic constraints. A fundamental requirement is that the path found in the first step should be time-parameterizable. Most existing works fulfill this requirement by enforcing quasi-static constraints in the path planning step, resulting in an important loss in completeness. We propose a method that enables path-velocity decomposition to discover truly dynamic motions, i.e. motions that are not quasi-statically executable. At the heart of the proposed method is a new algorithm -- Admissible Velocity Propagation -- which, given a path and an interval of reachable velocities at the beginning of that path, computes exactly and efficiently the interval of all the velocities the system can reach after traversing the path while respecting the system kinodynamic constraints. Combining this algorithm with usual sampling-based planners then gives rise to a family of new trajectory planners that can appropriately handle kinodynamic constraints while retaining the advantages associated with path-velocity decomposition. We demonstrate the efficiency of the proposed method on some difficult kinodynamic planning problems, where, in particular, quasi-static methods are guaranteed to fail.
ZMP support areas for multi-contact mobility under frictional constraints
Sep 28, 2016



We propose a method for checking and enforcing multi-contact stability based on the Zero-tilting Moment Point (ZMP). The key to our development is the generalization of ZMP support areas to take into account (a) frictional constraints and (b) multiple non-coplanar contacts. We introduce and investigate two kinds of ZMP support areas. First, we characterize and provide a fast geometric construction for the support area generated by valid contact forces, with no other constraint on the robot motion. We call this set the full support area. Next, we consider the control of humanoid robots using the Linear Pendulum Mode (LPM). We observe that the constraints stemming from the LPM induce a shrinking of the support area, even for walking on horizontal floors. We propose an algorithm to compute the new area, which we call pendular support area. We show that, in the LPM, having the ZMP in the pendular support area is a necessary and sufficient condition for contact stability. Based on these developments, we implement a whole-body controller and generate feasible multi-contact motions where an HRP-4 humanoid locomotes in challenging multi-contact scenarios.