 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStability of Surface Contacts for Humanoid Robots: Closed-Form Formulae of the Contact Wrench Cone for Rectangular Support Areas
Paper and Code
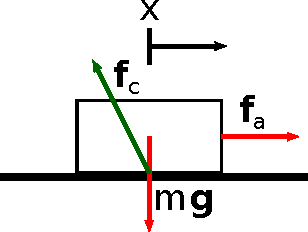
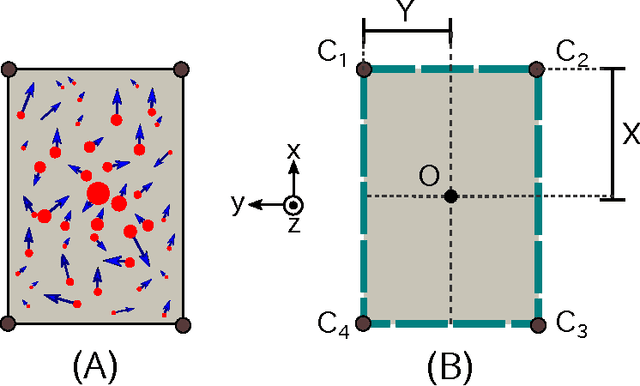

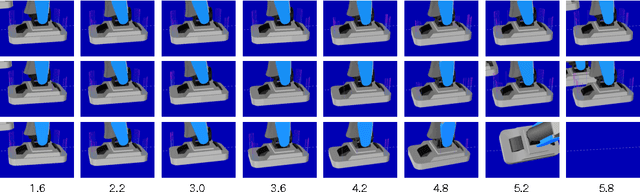
Humanoid robots locomote by making and breaking contacts with their environment. A crucial problem is therefore to find precise criteria for a given contact to remain stable or to break. For rigid surface contacts, the most general criterion is the Contact Wrench Condition (CWC). To check whether a motion satisfies the CWC, existing approaches take into account a large number of individual contact forces (for instance, one at each vertex of the support polygon), which is computationally costly and prevents the use of efficient inverse-dynamics methods. Here we argue that the CWC can be explicitly computed without reference to individual contact forces, and give closed-form formulae in the case of rectangular surfaces -- which is of practical importance. It turns out that these formulae simply and naturally express three conditions: (i) Coulomb friction on the resultant force, (ii) ZMP inside the support area, and (iii) bounds on the yaw torque. Conditions (i) and (ii) are already known, but condition (iii) is, to the best of our knowledge, novel. It is also of particular interest for biped locomotion, where undesired foot yaw rotations are a known issue. We also show that our formulae yield simpler and faster computations than existing approaches for humanoid motions in single support, and demonstrate their consistency in the OpenHRP simulator.