Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSplitFusion: Simultaneous Tracking and Mapping for Non-Rigid Scenes
Paper and Code
Jul 04, 2020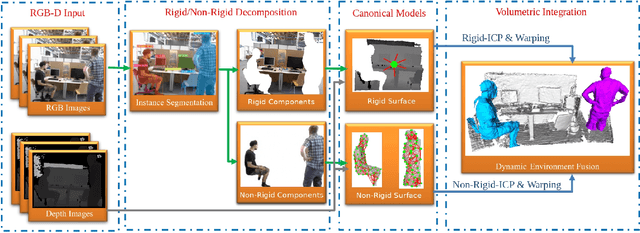
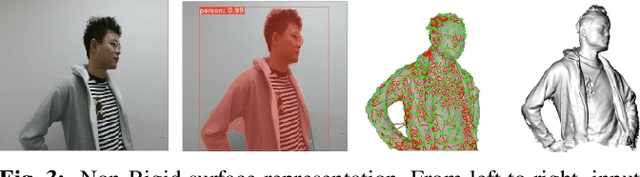
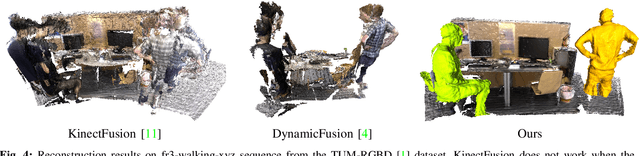
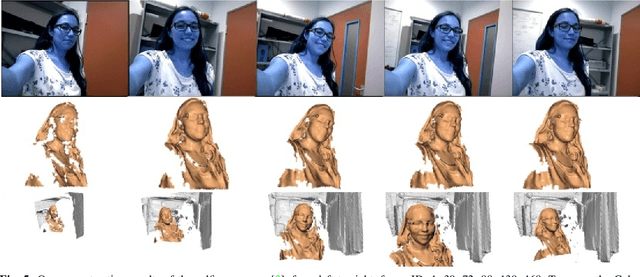
We present SplitFusion, a novel dense RGB-D SLAM framework that simultaneously performs tracking and dense reconstruction for both rigid and non-rigid components of the scene. SplitFusion first adopts deep learning based semantic instant segmentation technique to split the scene into rigid or non-rigid surfaces. The split surfaces are independently tracked via rigid or non-rigid ICP and reconstructed through incremental depth map fusion. Experimental results show that the proposed approach can provide not only accurate environment maps but also well-reconstructed non-rigid targets, e.g. the moving humans.
* Accepted to IROS'2020
View paper on