 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
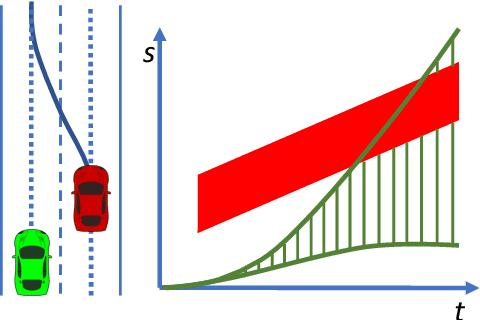
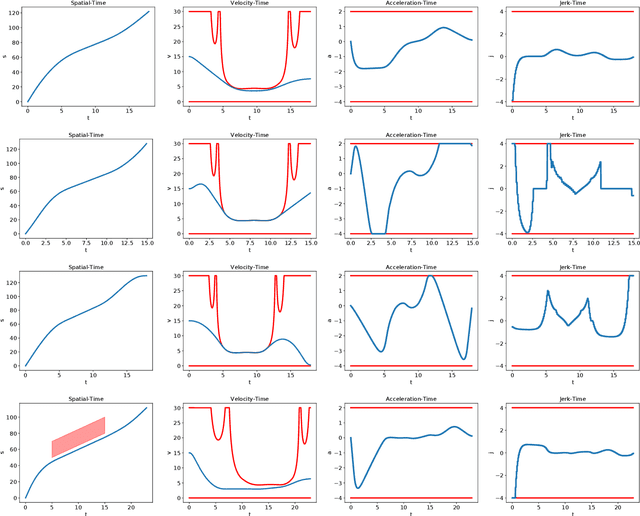
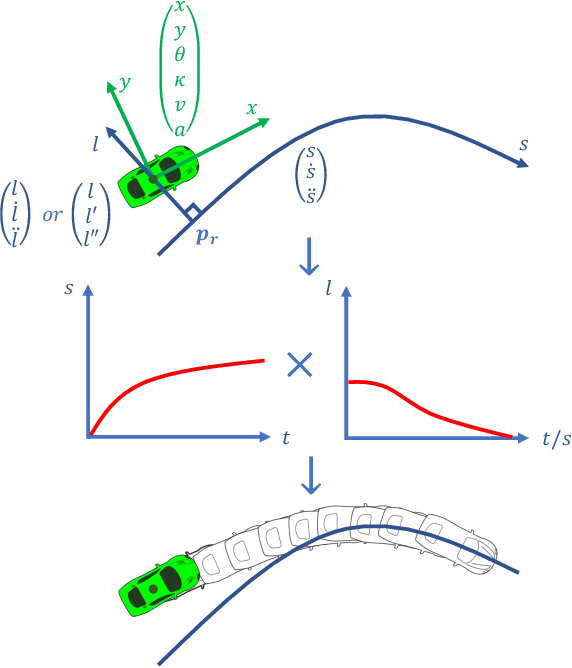
Add to EdgeOptimal Vehicle Trajectory Planning for Static Obstacle Avoidance using Nonlinear Optimization
Jul 18, 2023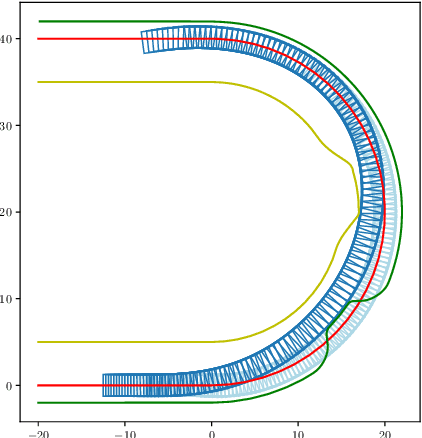
Vehicle trajectory planning is a key component for an autonomous driving system. A practical system not only requires the component to compute a feasible trajectory, but also a comfortable one given certain comfort metrics. Nevertheless, computation efficiency is critical for the system to be deployed as a commercial product. In this paper, we present a novel trajectory planning algorithm based on nonlinear optimization. The algorithm computes a kinematically feasible and comfort-optimal trajectory that achieves collision avoidance with static obstacles. Furthermore, the algorithm is time efficient. It generates an 6-second trajectory within 10 milliseconds on an Intel i7 machine or 20 milliseconds on an Nvidia Drive Orin platform.
AIROGS: Artificial Intelligence for RObust Glaucoma Screening Challenge
Feb 10, 2023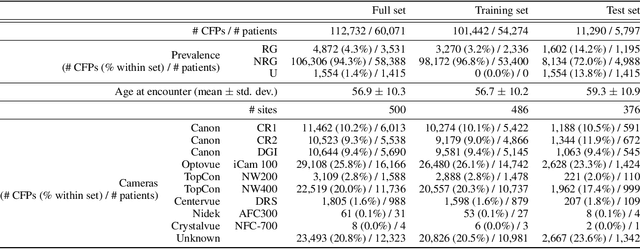
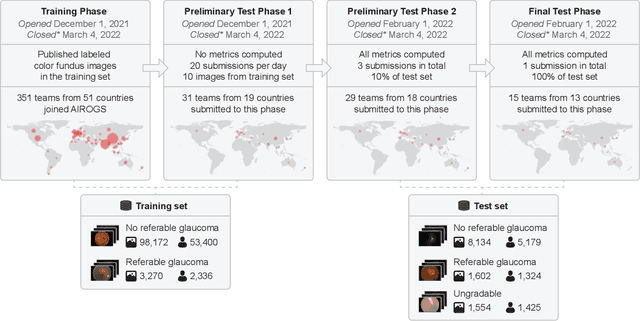
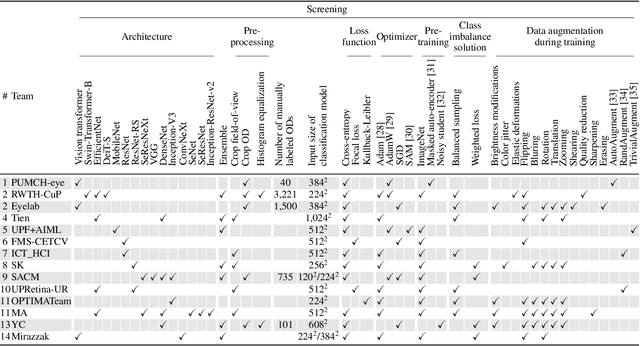
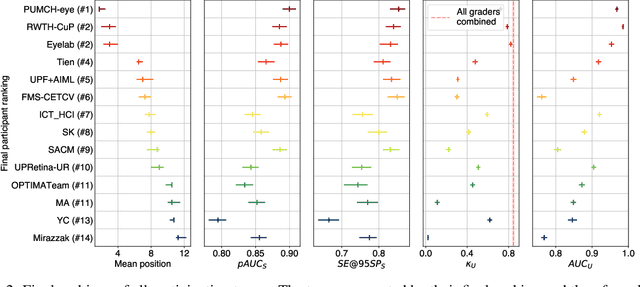
The early detection of glaucoma is essential in preventing visual impairment. Artificial intelligence (AI) can be used to analyze color fundus photographs (CFPs) in a cost-effective manner, making glaucoma screening more accessible. While AI models for glaucoma screening from CFPs have shown promising results in laboratory settings, their performance decreases significantly in real-world scenarios due to the presence of out-of-distribution and low-quality images. To address this issue, we propose the Artificial Intelligence for Robust Glaucoma Screening (AIROGS) challenge. This challenge includes a large dataset of around 113,000 images from about 60,000 patients and 500 different screening centers, and encourages the development of algorithms that are robust to ungradable and unexpected input data. We evaluated solutions from 14 teams in this paper, and found that the best teams performed similarly to a set of 20 expert ophthalmologists and optometrists. The highest-scoring team achieved an area under the receiver operating characteristic curve of 0.99 (95% CI: 0.98-0.99) for detecting ungradable images on-the-fly. Additionally, many of the algorithms showed robust performance when tested on three other publicly available datasets. These results demonstrate the feasibility of robust AI-enabled glaucoma screening.
CoordX: Accelerating Implicit Neural Representation with a Split MLP Architecture
Jan 28, 2022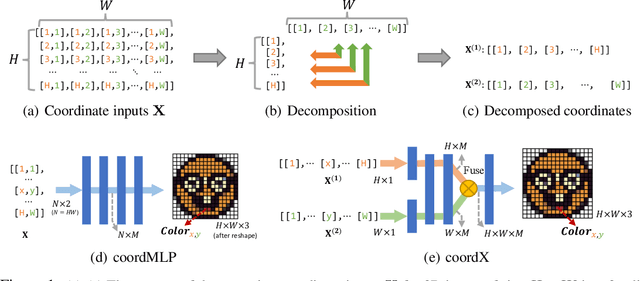

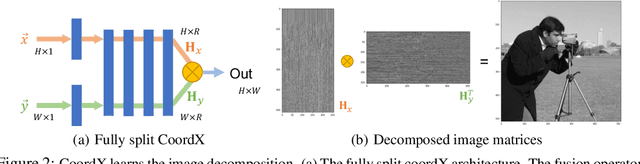

Implicit neural representations with multi-layer perceptrons (MLPs) have recently gained prominence for a wide variety of tasks such as novel view synthesis and 3D object representation and rendering. However, a significant challenge with these representations is that both training and inference with an MLP over a large number of input coordinates to learn and represent an image, video, or 3D object, require large amounts of computation and incur long processing times. In this work, we aim to accelerate inference and training of coordinate-based MLPs for implicit neural representations by proposing a new split MLP architecture, CoordX. With CoordX, the initial layers are split to learn each dimension of the input coordinates separately. The intermediate features are then fused by the last layers to generate the learned signal at the corresponding coordinate point. This significantly reduces the amount of computation required and leads to large speedups in training and inference, while achieving similar accuracy as the baseline MLP. This approach thus aims at first learning functions that are a decomposition of the original signal and then fusing them to generate the learned signal. Our proposed architecture can be generally used for many implicit neural representation tasks with no additional memory overheads. We demonstrate a speedup of up to 2.92x compared to the baseline model for image, video, and 3D shape representation and rendering tasks.
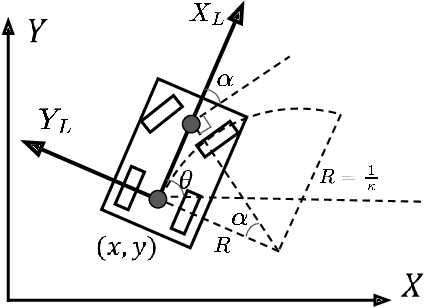
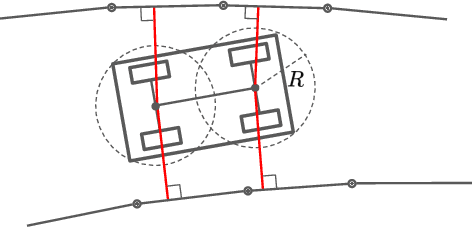
Optimal Trajectory Generation for Autonomous Vehicles Under Centripetal Acceleration Constraints for In-lane Driving Scenarios
Dec 03, 2021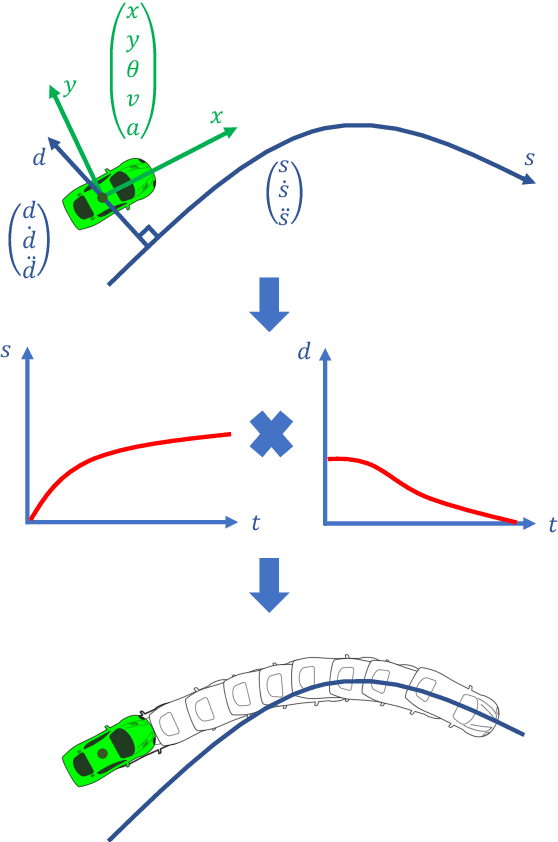
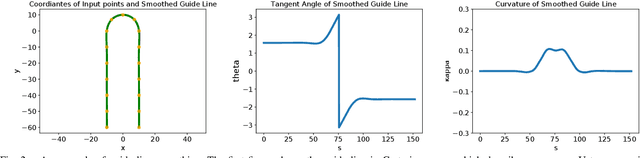
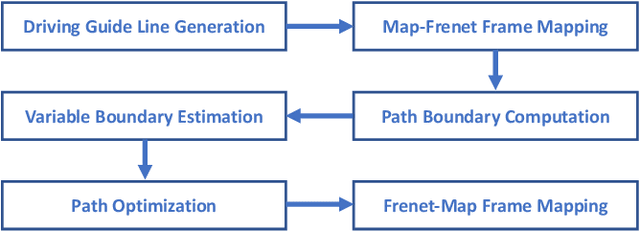
This paper presents a noval method that generates optimal trajectories for autonomous vehicles for in-lane driving scenarios. The method computes a trajectory using a two-phase optimization procedure. In the first phase, the optimization procedure generates a close-form driving guide line with differetiable curvatures. In the second phase, the procedure takes the driving guide line as input, and outputs dynamically feasible, jerk and time optimal trajectories for vehicles driving along the guide line. This method is especially useful for generating trajectories at curvy road where the vehicles need to apply frequent accelerations and decelerations to accommodate centripetal acceleration limits.
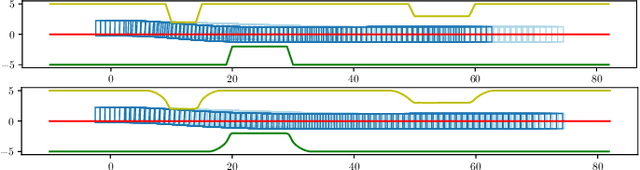
Optimal Vehicle Path Planning Using Quadratic Optimization for Baidu Apollo Open Platform
Dec 03, 2021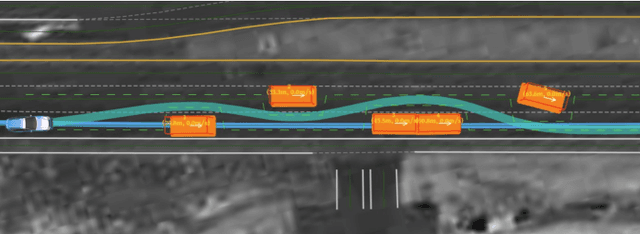

Path planning is a key component in motion planning for autonomous vehicles. A path specifies the geometrical shape that the vehicle will travel, thus, it is critical to safe and comfortable vehicle motions. For urban driving scenarios, autonomous vehicles need the ability to navigate in cluttered environment, e.g., roads partially blocked by a number of vehicles/obstacles on the sides. How to generate a kinematically feasible and smooth path, that can avoid collision in complex environment, makes path planning a challenging problem. In this paper, we present a novel quadratic programming approach that generates optimal paths with resolution-complete collision avoidance capability.
Emergency Vehicles Audio Detection and Localization in Autonomous Driving
Oct 02, 2021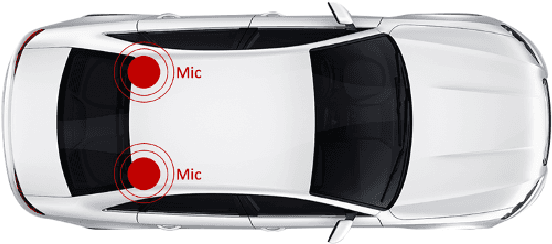
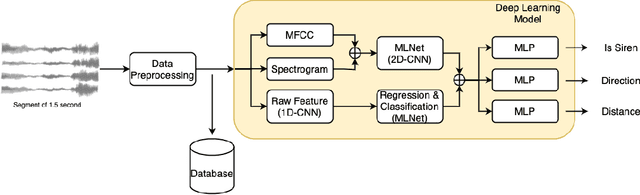
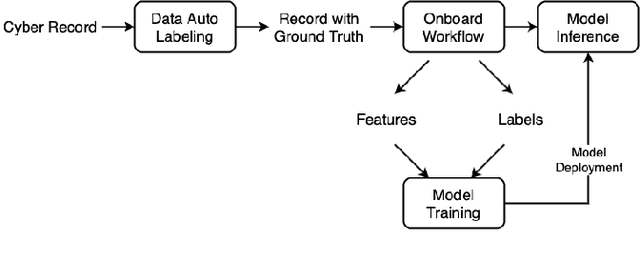
Emergency vehicles in service have right-of-way over all other vehicles. Hence, all other vehicles are supposed to take proper actions to yield emergency vehicles with active sirens. As this task requires the cooperation between ears and eyes for human drivers, it also needs audio detection as a supplement to vision-based algorithms for fully autonomous driving vehicles. In urban driving scenarios, we need to know both the existence of emergency vehicles and their relative positions to us to decide the proper actions. We present a novel system from collecting the real-world siren data to the deployment of models using only two cost-efficient microphones. We are able to achieve promising performance for each task separately, especially within the crucial 10m to 50m distance range to react (the size of our ego vehicle is around 5m in length and 2m in width). The recall rate to determine the existence of sirens is 99.16% , the median and mean angle absolute error is 9.64{\deg} and 19.18{\deg} respectively, and the median and mean distance absolute error of 9.30m and 10.58m respectively within that range. We also benchmark various machine learning approaches that can determine the siren existence and sound source localization which includes direction and distance simultaneously within 50ms of latency.
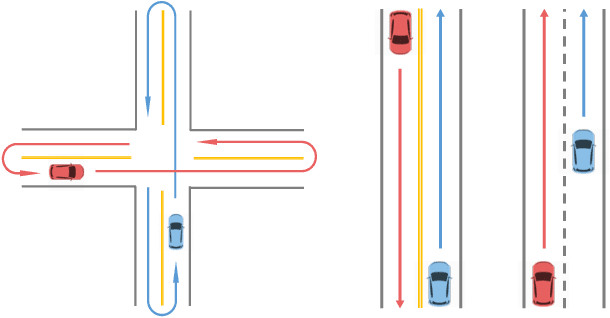
Lane Attention: Predicting Vehicles' Moving Trajectories by Learning Their Attention over Lanes
Sep 29, 2019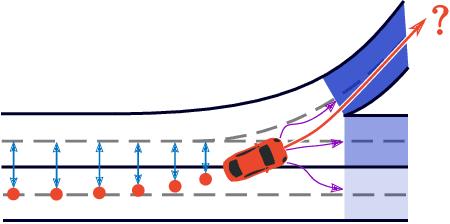
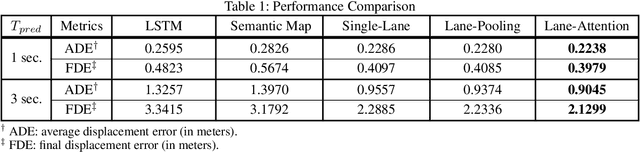
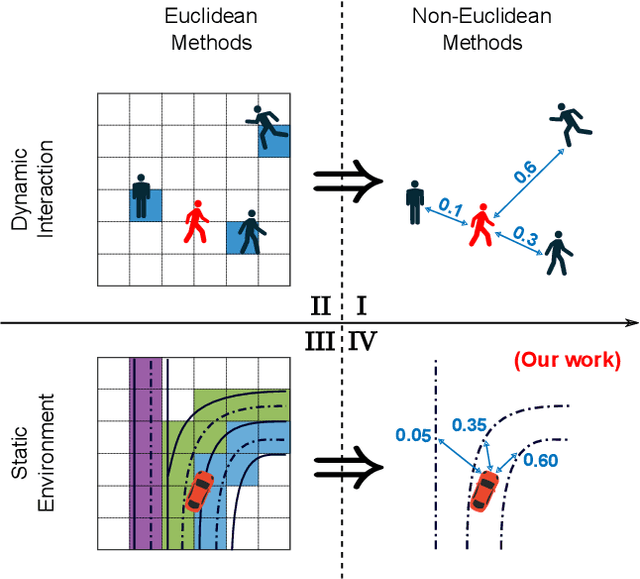
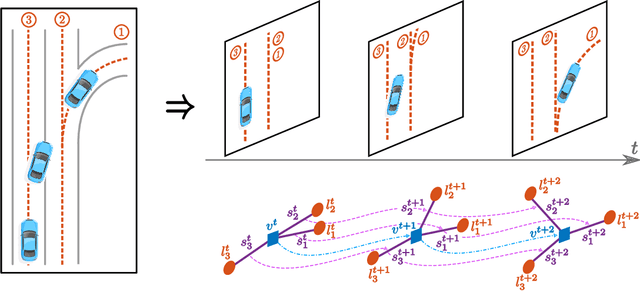
Accurately forecasting the future movements of surrounding vehicles is essential for safe and efficient operations of autonomous driving cars. This task is difficult because a vehicle's moving trajectory is greatly determined by its driver's intention, which is often hard to estimate. By leveraging attention mechanisms along with long short-term memory (LSTM) networks, this work learns the relation between a driver's intention and the vehicle's changing positions relative to road infrastructures, and uses it to guide the prediction. Different from other state-of-the-art solutions, our work treats the on-road lanes as non-Euclidean structures, unfolds the vehicle's moving history to form a spatio-temporal graph, and uses methods from Graph Neural Networks to solve the problem. Not only is our approach a pioneering attempt in using non-Euclidean methods to process static environmental features around a predicted object, our model also outperforms other state-of-the-art models in several metrics. The practicability and interpretability analysis of the model shows great potential for large-scale deployment in various autonomous driving systems in addition to our own.