 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeARM: An AutoRegressive Large Multimodal Model with Unified Discrete Representations
Jun 09, 2026This paper introduces ARM, a discrete representation-based AutoRegressive Model that unifies image understanding, generation, and editing within a next-token prediction framework. ARM is built on three efforts: first, we train a discrete semantic visual tokenizer that maps images into compact token sequences. Our tokenizer is supervised with multiple objectives that jointly promote semantic discriminability, language alignment and faithful reconstruction, thereby supporting diverse tasks in a shared latent space. With this, we train a 7B autoregressive model over large-scale text and image token sequences, seamlessly developing vision-language perception and generation capabilities. Finally, to further improve preference-aligned behavior for text-to-image generation and instruction-guided editing, ARM applies reinforcement learning (RL) to optimize task-level objectives such as visual quality, instruction adherence, and edit consistency. Surprisingly, the results show that RL not only substantially improves performance on the target tasks (e.g., raising WISE overall from 0.50 to 0.56, GEdit-Bench-EN G_O from 5.75 to 6.68), but also induces cross-task synergy between text-to-image generation and editing. Collectively, these findings highlight autoregressive modeling, when paired with strong representations and preference optimization, as a scalable foundation for multimodal intelligence. Code: https://github.com/wdrink/ARM.
AgentComp: From Agentic Reasoning to Compositional Mastery in Text-to-Image Models
Dec 09, 2025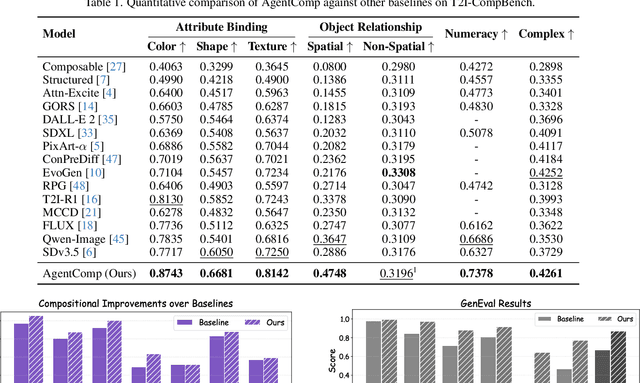
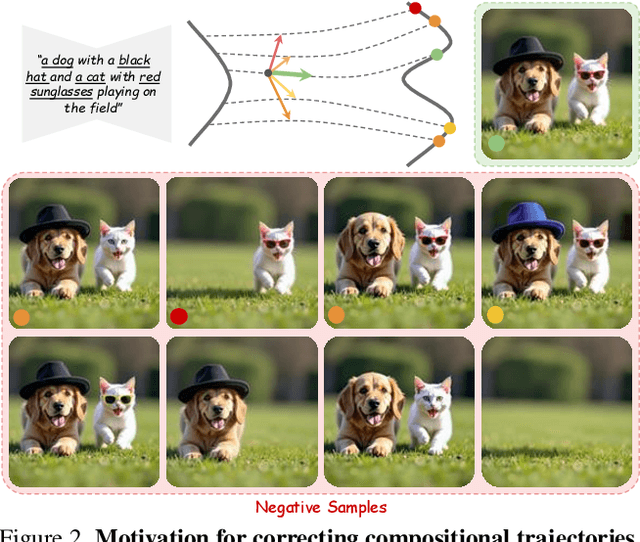
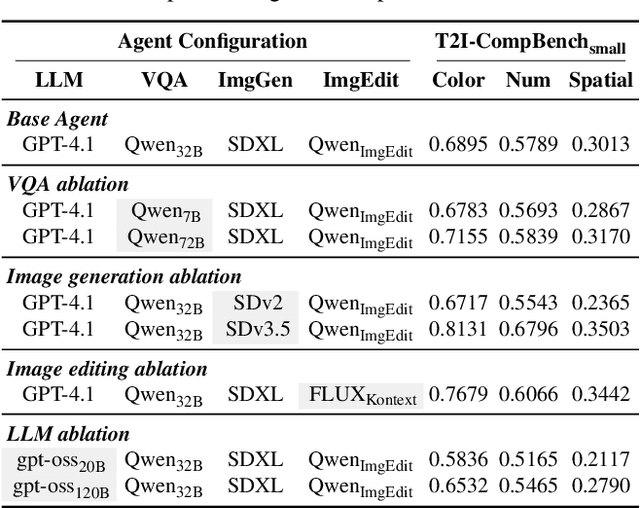
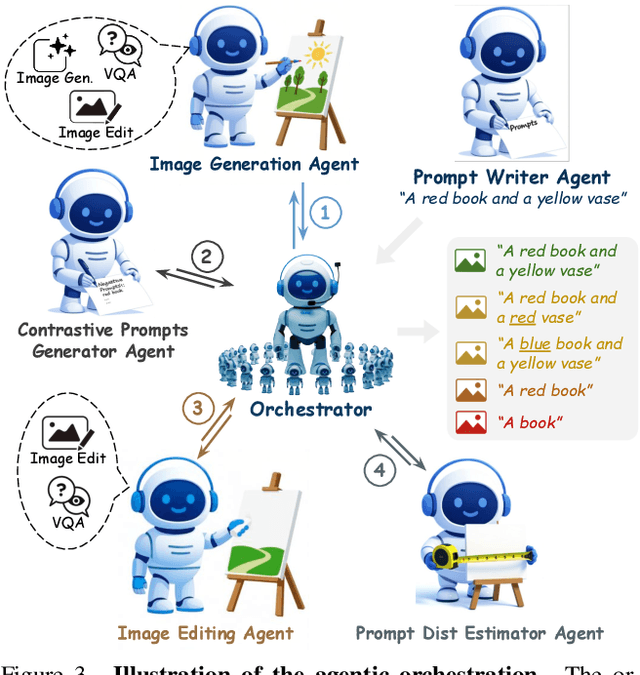
Text-to-image generative models have achieved remarkable visual quality but still struggle with compositionality$-$accurately capturing object relationships, attribute bindings, and fine-grained details in prompts. A key limitation is that models are not explicitly trained to differentiate between compositionally similar prompts and images, resulting in outputs that are close to the intended description yet deviate in fine-grained details. To address this, we propose AgentComp, a framework that explicitly trains models to better differentiate such compositional variations and enhance their reasoning ability. AgentComp leverages the reasoning and tool-use capabilities of large language models equipped with image generation, editing, and VQA tools to autonomously construct compositional datasets. Using these datasets, we apply an agentic preference optimization method to fine-tune text-to-image models, enabling them to better distinguish between compositionally similar samples and resulting in overall stronger compositional generation ability. AgentComp achieves state-of-the-art results on compositionality benchmarks such as T2I-CompBench, without compromising image quality$-$a common drawback in prior approaches$-$and even generalizes to other capabilities not explicitly trained for, such as text rendering.
Optimal Vehicle Path Planning Using Quadratic Optimization for Baidu Apollo Open Platform
Dec 03, 2021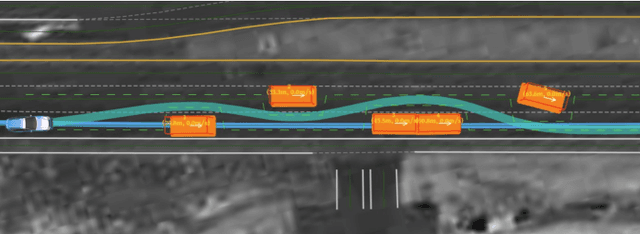

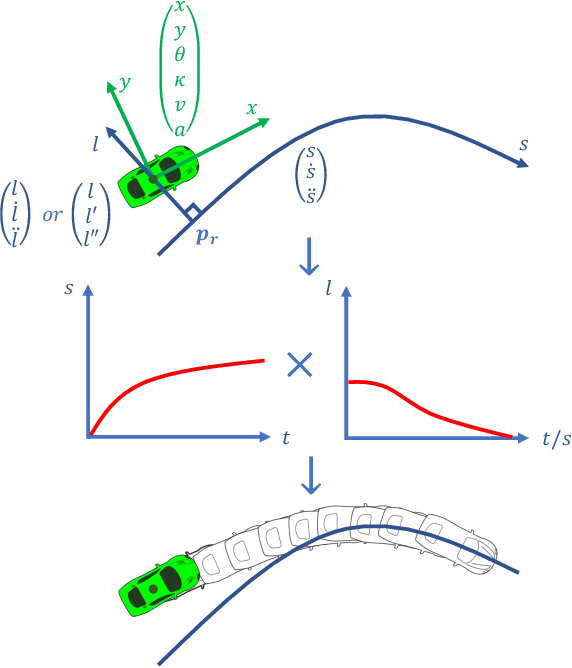
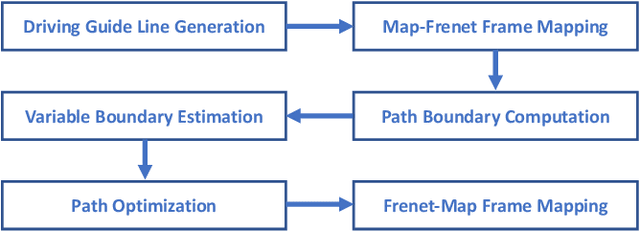
Path planning is a key component in motion planning for autonomous vehicles. A path specifies the geometrical shape that the vehicle will travel, thus, it is critical to safe and comfortable vehicle motions. For urban driving scenarios, autonomous vehicles need the ability to navigate in cluttered environment, e.g., roads partially blocked by a number of vehicles/obstacles on the sides. How to generate a kinematically feasible and smooth path, that can avoid collision in complex environment, makes path planning a challenging problem. In this paper, we present a novel quadratic programming approach that generates optimal paths with resolution-complete collision avoidance capability.
Improving Dialogue Breakdown Detection with Semi-Supervised Learning
Oct 30, 2020
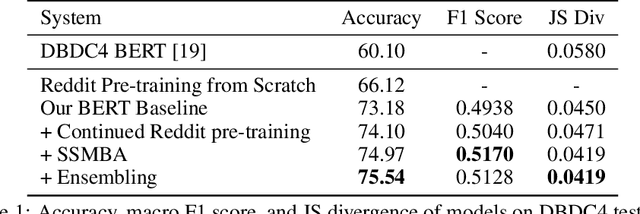
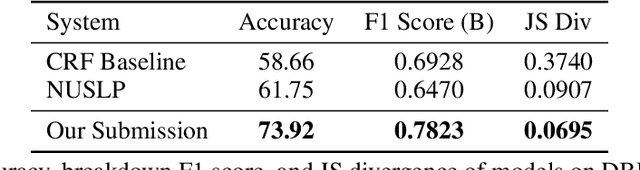
Building user trust in dialogue agents requires smooth and consistent dialogue exchanges. However, agents can easily lose conversational context and generate irrelevant utterances. These situations are called dialogue breakdown, where agent utterances prevent users from continuing the conversation. Building systems to detect dialogue breakdown allows agents to recover appropriately or avoid breakdown entirely. In this paper we investigate the use of semi-supervised learning methods to improve dialogue breakdown detection, including continued pre-training on the Reddit dataset and a manifold-based data augmentation method. We demonstrate the effectiveness of these methods on the Dialogue Breakdown Detection Challenge (DBDC) English shared task. Our submissions to the 2020 DBDC5 shared task place first, beating baselines and other submissions by over 12\% accuracy. In ablations on DBDC4 data from 2019, our semi-supervised learning methods improve the performance of a baseline BERT model by 2\% accuracy. These methods are applicable generally to any dialogue task and provide a simple way to improve model performance.
Lane Attention: Predicting Vehicles' Moving Trajectories by Learning Their Attention over Lanes
Sep 29, 2019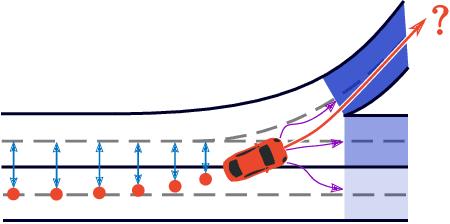
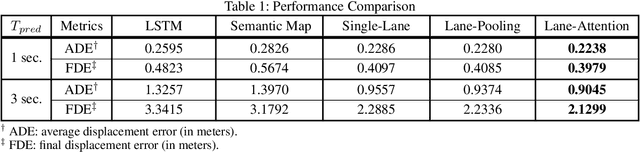
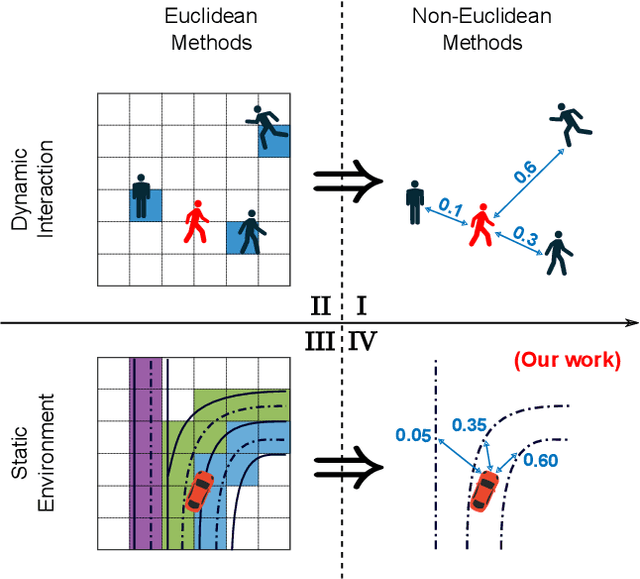
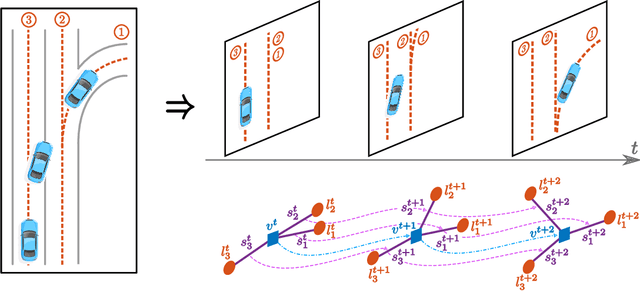
Accurately forecasting the future movements of surrounding vehicles is essential for safe and efficient operations of autonomous driving cars. This task is difficult because a vehicle's moving trajectory is greatly determined by its driver's intention, which is often hard to estimate. By leveraging attention mechanisms along with long short-term memory (LSTM) networks, this work learns the relation between a driver's intention and the vehicle's changing positions relative to road infrastructures, and uses it to guide the prediction. Different from other state-of-the-art solutions, our work treats the on-road lanes as non-Euclidean structures, unfolds the vehicle's moving history to form a spatio-temporal graph, and uses methods from Graph Neural Networks to solve the problem. Not only is our approach a pioneering attempt in using non-Euclidean methods to process static environmental features around a predicted object, our model also outperforms other state-of-the-art models in several metrics. The practicability and interpretability analysis of the model shows great potential for large-scale deployment in various autonomous driving systems in addition to our own.