Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal Trajectory Generation for Autonomous Vehicles Under Centripetal Acceleration Constraints for In-lane Driving Scenarios
Paper and Code
Dec 03, 2021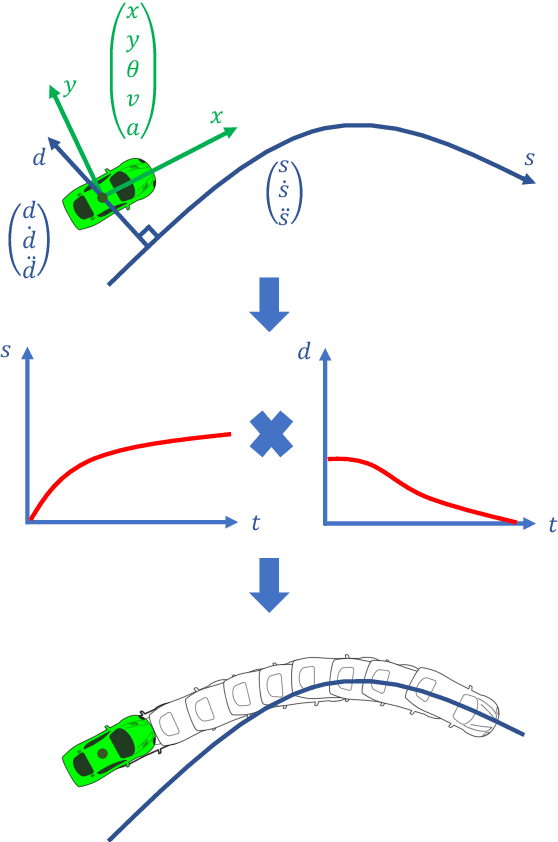
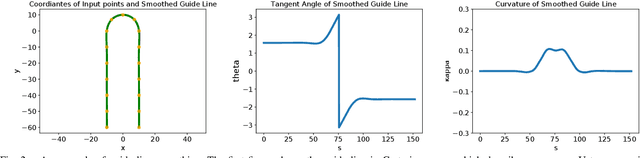
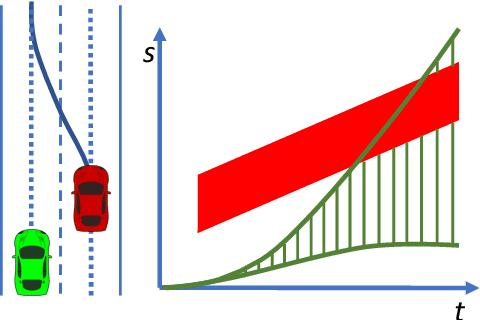
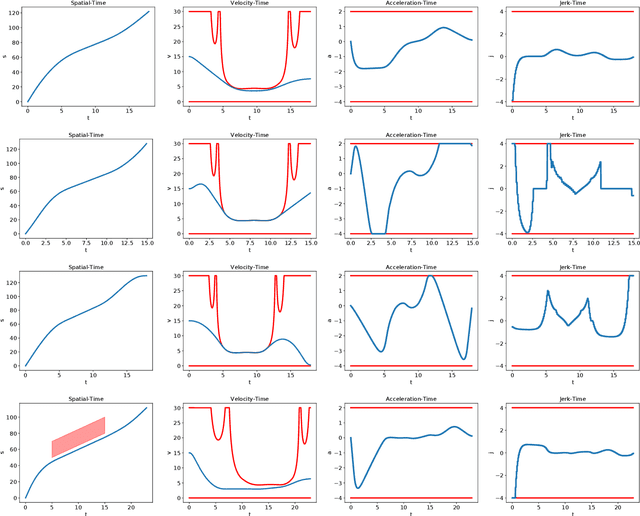
This paper presents a noval method that generates optimal trajectories for autonomous vehicles for in-lane driving scenarios. The method computes a trajectory using a two-phase optimization procedure. In the first phase, the optimization procedure generates a close-form driving guide line with differetiable curvatures. In the second phase, the procedure takes the driving guide line as input, and outputs dynamically feasible, jerk and time optimal trajectories for vehicles driving along the guide line. This method is especially useful for generating trajectories at curvy road where the vehicles need to apply frequent accelerations and decelerations to accommodate centripetal acceleration limits.
* IEEE International Conference on Intelligent Transportation Systems
(ITSC) 2019
View paper on