Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal Vehicle Trajectory Planning for Static Obstacle Avoidance using Nonlinear Optimization
Paper and Code
Jul 18, 2023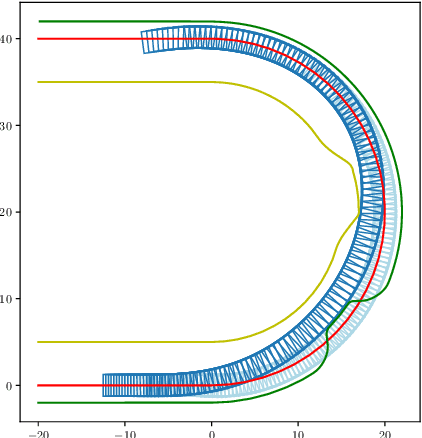
Vehicle trajectory planning is a key component for an autonomous driving system. A practical system not only requires the component to compute a feasible trajectory, but also a comfortable one given certain comfort metrics. Nevertheless, computation efficiency is critical for the system to be deployed as a commercial product. In this paper, we present a novel trajectory planning algorithm based on nonlinear optimization. The algorithm computes a kinematically feasible and comfort-optimal trajectory that achieves collision avoidance with static obstacles. Furthermore, the algorithm is time efficient. It generates an 6-second trajectory within 10 milliseconds on an Intel i7 machine or 20 milliseconds on an Nvidia Drive Orin platform.
View paper on