 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmergency Vehicles Audio Detection and Localization in Autonomous Driving
Paper and Code
Oct 02, 2021
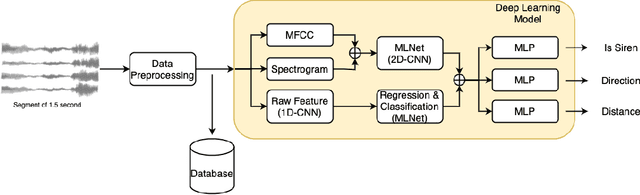
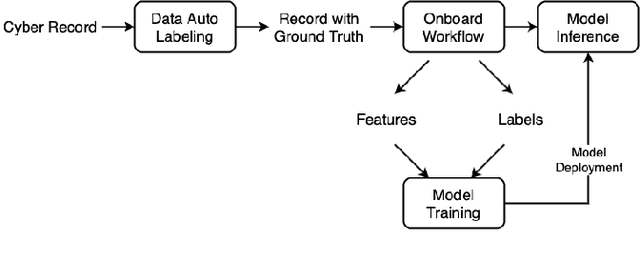
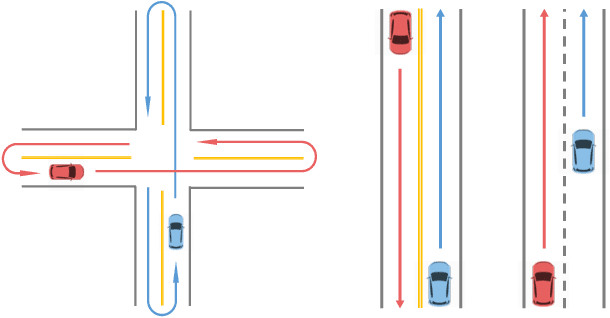
Emergency vehicles in service have right-of-way over all other vehicles. Hence, all other vehicles are supposed to take proper actions to yield emergency vehicles with active sirens. As this task requires the cooperation between ears and eyes for human drivers, it also needs audio detection as a supplement to vision-based algorithms for fully autonomous driving vehicles. In urban driving scenarios, we need to know both the existence of emergency vehicles and their relative positions to us to decide the proper actions. We present a novel system from collecting the real-world siren data to the deployment of models using only two cost-efficient microphones. We are able to achieve promising performance for each task separately, especially within the crucial 10m to 50m distance range to react (the size of our ego vehicle is around 5m in length and 2m in width). The recall rate to determine the existence of sirens is 99.16% , the median and mean angle absolute error is 9.64{\deg} and 19.18{\deg} respectively, and the median and mean distance absolute error of 9.30m and 10.58m respectively within that range. We also benchmark various machine learning approaches that can determine the siren existence and sound source localization which includes direction and distance simultaneously within 50ms of latency.