 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMGD-SAM2: Multi-view Guided Detail-enhanced Segment Anything Model 2 for High-Resolution Class-agnostic Segmentation
Mar 31, 2025Segment Anything Models (SAMs), as vision foundation models, have demonstrated remarkable performance across various image analysis tasks. Despite their strong generalization capabilities, SAMs encounter challenges in fine-grained detail segmentation for high-resolution class-independent segmentation (HRCS), due to the limitations in the direct processing of high-resolution inputs and low-resolution mask predictions, and the reliance on accurate manual prompts. To address these limitations, we propose MGD-SAM2 which integrates SAM2 with multi-view feature interaction between a global image and local patches to achieve precise segmentation. MGD-SAM2 incorporates the pre-trained SAM2 with four novel modules: the Multi-view Perception Adapter (MPAdapter), the Multi-view Complementary Enhancement Module (MCEM), the Hierarchical Multi-view Interaction Module (HMIM), and the Detail Refinement Module (DRM). Specifically, we first introduce MPAdapter to adapt the SAM2 encoder for enhanced extraction of local details and global semantics in HRCS images. Then, MCEM and HMIM are proposed to further exploit local texture and global context by aggregating multi-view features within and across multi-scales. Finally, DRM is designed to generate gradually restored high-resolution mask predictions, compensating for the loss of fine-grained details resulting from directly upsampling the low-resolution prediction maps. Experimental results demonstrate the superior performance and strong generalization of our model on multiple high-resolution and normal-resolution datasets. Code will be available at https://github.com/sevenshr/MGD-SAM2.
KAN versus MLP on Irregular or Noisy Functions
Aug 15, 2024



In this paper, we compare the performance of Kolmogorov-Arnold Networks (KAN) and Multi-Layer Perceptron (MLP) networks on irregular or noisy functions. We control the number of parameters and the size of the training samples to ensure a fair comparison. For clarity, we categorize the functions into six types: regular functions, continuous functions with local non-differentiable points, functions with jump discontinuities, functions with singularities, functions with coherent oscillations, and noisy functions. Our experimental results indicate that KAN does not always perform best. For some types of functions, MLP outperforms or performs comparably to KAN. Furthermore, increasing the size of training samples can improve performance to some extent. When noise is added to functions, the irregular features are often obscured by the noise, making it challenging for both MLP and KAN to extract these features effectively. We hope these experiments provide valuable insights for future neural network research and encourage further investigations to overcome these challenges.
Reduced Effectiveness of Kolmogorov-Arnold Networks on Functions with Noise
Jul 20, 2024



It has been observed that even a small amount of noise introduced into the dataset can significantly degrade the performance of KAN. In this brief note, we aim to quantitatively evaluate the performance when noise is added to the dataset. We propose an oversampling technique combined with denoising to alleviate the impact of noise. Specifically, we employ kernel filtering based on diffusion maps for pre-filtering the noisy data for training KAN network. Our experiments show that while adding i.i.d. noise with any fixed SNR, when we increase the amount of training data by a factor of $r$, the test-loss (RMSE) of KANs will exhibit a performance trend like $\text{test-loss} \sim \mathcal{O}(r^{-\frac{1}{2}})$ as $r\to +\infty$. We conclude that applying both oversampling and filtering strategies can reduce the detrimental effects of noise. Nevertheless, determining the optimal variance for the kernel filtering process is challenging, and enhancing the volume of training data substantially increases the associated costs, because the training dataset needs to be expanded multiple times in comparison to the initial clean data. As a result, the noise present in the data ultimately diminishes the effectiveness of Kolmogorov-Arnold networks.
Adaptive FSS: A Novel Few-Shot Segmentation Framework via Prototype Enhancement
Jan 09, 2024The Few-Shot Segmentation (FSS) aims to accomplish the novel class segmentation task with a few annotated images. Current FSS research based on meta-learning focus on designing a complex interaction mechanism between the query and support feature. However, unlike humans who can rapidly learn new things from limited samples, the existing approach relies solely on fixed feature matching to tackle new tasks, lacking adaptability. In this paper, we propose a novel framework based on the adapter mechanism, namely Adaptive FSS, which can efficiently adapt the existing FSS model to the novel classes. In detail, we design the Prototype Adaptive Module (PAM), which utilizes accurate category information provided by the support set to derive class prototypes, enhancing class-specific information in the multi-stage representation. In addition, our approach is compatible with diverse FSS methods with different backbones by simply inserting PAM between the layers of the encoder. Experiments demonstrate that our method effectively improves the performance of the FSS models (e.g., MSANet, HDMNet, FPTrans, and DCAMA) and achieve new state-of-the-art (SOTA) results (i.e., 72.4\% and 79.1\% mIoU on PASCAL-5$^i$ 1-shot and 5-shot settings, 52.7\% and 60.0\% mIoU on COCO-20$^i$ 1-shot and 5-shot settings). Our code can be available at https://github.com/jingw193/AdaptiveFSS.
A Safer Vision-based Autonomous Planning System for Quadrotor UAVs with Dynamic Obstacle Trajectory Prediction and Its Application with LLMs
Nov 21, 2023For intelligent quadcopter UAVs, a robust and reliable autonomous planning system is crucial. Most current trajectory planning methods for UAVs are suitable for static environments but struggle to handle dynamic obstacles, which can pose challenges and even dangers to flight. To address this issue, this paper proposes a vision-based planning system that combines tracking and trajectory prediction of dynamic obstacles to achieve efficient and reliable autonomous flight. We use a lightweight object detection algorithm to identify dynamic obstacles and then use Kalman Filtering to track and estimate their motion states. During the planning phase, we not only consider static obstacles but also account for the potential movements of dynamic obstacles. For trajectory generation, we use a B-spline-based trajectory search algorithm, which is further optimized with various constraints to enhance safety and alignment with the UAV's motion characteristics. We conduct experiments in both simulation and real-world environments, and the results indicate that our approach can successfully detect and avoid obstacles in dynamic environments in real-time, offering greater reliability compared to existing approaches. Furthermore, with the advancements in Natural Language Processing (NLP) technology demonstrating exceptional zero-shot generalization capabilities, more user-friendly human-machine interactions have become feasible, and this study also explores the integration of autonomous planning systems with Large Language Models (LLMs).
Med-DANet V2: A Flexible Dynamic Architecture for Efficient Medical Volumetric Segmentation
Oct 28, 2023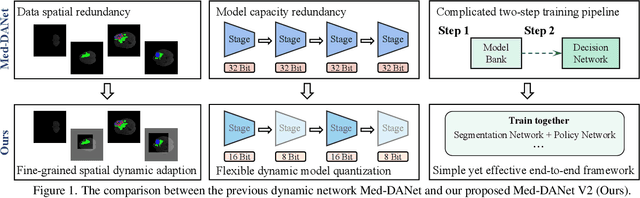
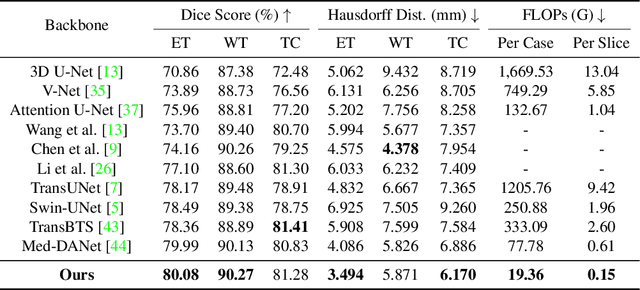
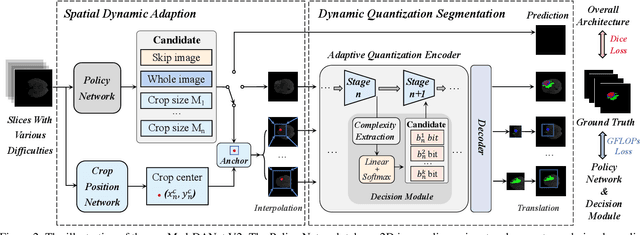
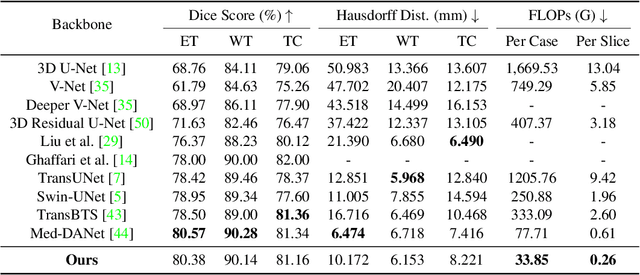
Recent works have shown that the computational efficiency of 3D medical image (e.g. CT and MRI) segmentation can be impressively improved by dynamic inference based on slice-wise complexity. As a pioneering work, a dynamic architecture network for medical volumetric segmentation (i.e. Med-DANet) has achieved a favorable accuracy and efficiency trade-off by dynamically selecting a suitable 2D candidate model from the pre-defined model bank for different slices. However, the issues of incomplete data analysis, high training costs, and the two-stage pipeline in Med-DANet require further improvement. To this end, this paper further explores a unified formulation of the dynamic inference framework from the perspective of both the data itself and the model structure. For each slice of the input volume, our proposed method dynamically selects an important foreground region for segmentation based on the policy generated by our Decision Network and Crop Position Network. Besides, we propose to insert a stage-wise quantization selector to the employed segmentation model (e.g. U-Net) for dynamic architecture adapting. Extensive experiments on BraTS 2019 and 2020 show that our method achieves comparable or better performance than previous state-of-the-art methods with much less model complexity. Compared with previous methods Med-DANet and TransBTS with dynamic and static architecture respectively, our framework improves the model efficiency by up to nearly 4.1 and 17.3 times with comparable segmentation results on BraTS 2019.