 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSUSTechGAN: Image Generation for Object Recognition in Adverse Conditions of Autonomous Driving
Jul 18, 2024



Autonomous driving significantly benefits from data-driven deep neural networks. However, the data in autonomous driving typically fits the long-tailed distribution, in which the critical driving data in adverse conditions is hard to collect. Although generative adversarial networks (GANs) have been applied to augment data for autonomous driving, generating driving images in adverse conditions is still challenging. In this work, we propose a novel SUSTechGAN with dual attention modules and multi-scale generators to generate driving images for improving object recognition of autonomous driving in adverse conditions. We test the SUSTechGAN and the existing well-known GANs to generate driving images in adverse conditions of rain and night and apply the generated images to retrain object recognition networks. Specifically, we add generated images into the training datasets to retrain the well-known YOLOv5 and evaluate the improvement of the retrained YOLOv5 for object recognition in adverse conditions. The experimental results show that the generated driving images by our SUSTechGAN significantly improved the performance of retrained YOLOv5 in rain and night conditions, which outperforms the well-known GANs. The open-source code, video description and datasets are available on the page 1 to facilitate image generation development in autonomous driving under adverse conditions.
A Virtual Reality Training System for Automotive Engines Assembly and Disassembly
Nov 02, 2023



Automotive engine assembly and disassembly are common and crucial programs in the automotive industry. Traditional education trains students to learn automotive engine assembly and disassembly in lecture courses and then to operate with physical engines, which are generally low effectiveness and high cost. In this work, we developed a multi-layer structured Virtual Reality (VR) system to provide students with training in automotive engine (Buick Verano) assembly and disassembly. We designed the VR training system with The VR training system is designed to have several major features, including replaceable engine parts and reusable tools, friendly user interfaces and guidance, and bottom-up designed multi-layer architecture, which can be extended to various engine models. The VR system is evaluated with controlled experiments of two groups of students. The results demonstrate that our VR training system provides remarkable usability in terms of effectiveness and efficiency. Currently, our VR system has been demonstrated and employed in the courses of Chinese colleges to train students in automotive engine assembly and disassembly. A free-to-use executable file (Microsoft Windows) and open-source code are available at https://github.com/LadissonLai/SUSTech_VREngine for facilitating the development of VR systems in the automotive industry. Finally, a video describing the operations in our VR training system is available at https://www.youtube.com/watch?v=yZe4YTwwAC4
Class Binarization to NeuroEvolution for Multiclass Classification
Aug 26, 2023Multiclass classification is a fundamental and challenging task in machine learning. The existing techniques of multiclass classification can be categorized as (i) decomposition into binary (ii) extension from binary and (iii) hierarchical classification. Decomposing multiclass classification into a set of binary classifications that can be efficiently solved by using binary classifiers, called class binarization, which is a popular technique for multiclass classification. Neuroevolution, a general and powerful technique for evolving the structure and weights of neural networks, has been successfully applied to binary classification. In this paper, we apply class binarization techniques to a neuroevolution algorithm, NeuroEvolution of Augmenting Topologies (NEAT), that is used to generate neural networks for multiclass classification. We propose a new method that applies Error-Correcting Output Codes (ECOC) to design the class binarization strategies on the neuroevolution for multiclass classification. The ECOC strategies are compared with the class binarization strategies of One-vs-One and One-vs-All on three well-known datasets Digit, Satellite, and Ecoli. We analyse their performance from four aspects of multiclass classification degradation, accuracy, evolutionary efficiency, and robustness. The results show that the NEAT with ECOC performs high accuracy with low variance. Specifically, it shows significant benefits in a flexible number of binary classifiers and strong robustness.
Vision-Based Human Pose Estimation via Deep Learning: A Survey
Aug 26, 2023



Human pose estimation (HPE) has attracted a significant amount of attention from the computer vision community in the past decades. Moreover, HPE has been applied to various domains, such as human-computer interaction, sports analysis, and human tracking via images and videos. Recently, deep learning-based approaches have shown state-of-the-art performance in HPE-based applications. Although deep learning-based approaches have achieved remarkable performance in HPE, a comprehensive review of deep learning-based HPE methods remains lacking in the literature. In this article, we provide an up-to-date and in-depth overview of the deep learning approaches in vision-based HPE. We summarize these methods of 2-D and 3-D HPE, and their applications, discuss the challenges and the research trends through bibliometrics, and provide insightful recommendations for future research. This article provides a meaningful overview as introductory material for beginners to deep learning-based HPE, as well as supplementary material for advanced researchers.
A Semantic Web Technology Index
Jan 14, 2022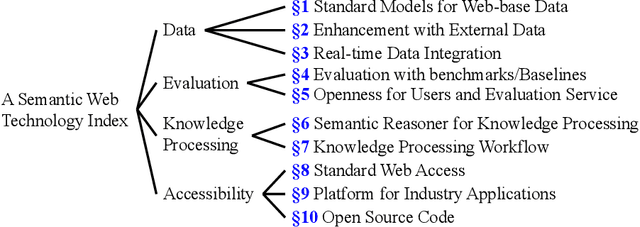
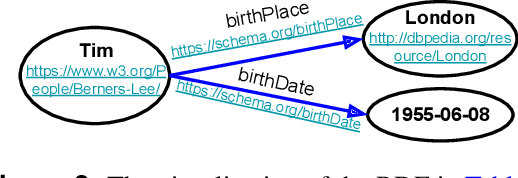
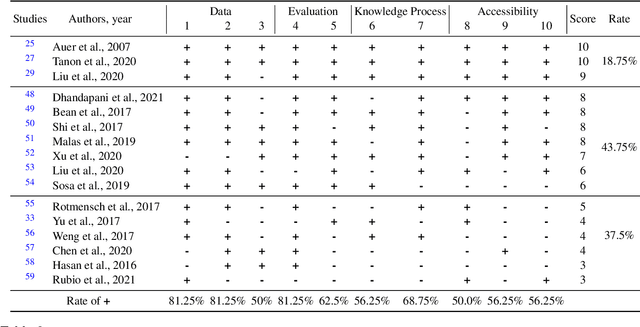
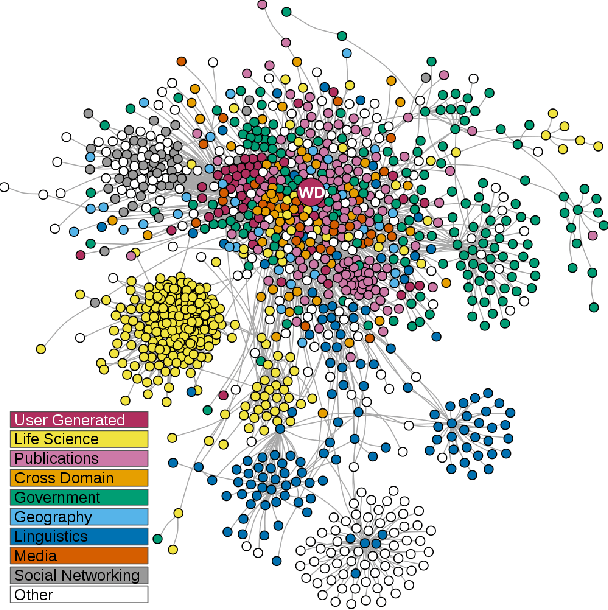
Semantic Web (SW) technology has been widely applied to many domains such as medicine, health care, finance, geology. At present, researchers mainly rely on their experience and preferences to develop and evaluate the work of SW technology. Although the general architecture (e.g., Tim Berners-Lee's Semantic Web Layer Cake) of SW technology was proposed many years ago and has been well-known, it still lacks a concrete guideline for standardizing the development of SW technology. In this paper, we propose an SW technology index to standardize the development for ensuring that the work of SW technology is designed well and to quantitatively evaluate the quality of the work in SW technology. This index consists of 10 criteria that quantify the quality as a score of 0 ~ 10. We address each criterion in detail for a clear explanation from three aspects: 1) what is the criterion? 2) why do we consider this criterion and 3) how do the current studies meet this criterion? Finally, we present the validation of this index by providing some examples of how to apply the index to the validation cases. We conclude that the index is a useful standard to guide and evaluate the work in SW technology.
Learning Locomotion Skills in Evolvable Robots
Oct 19, 2020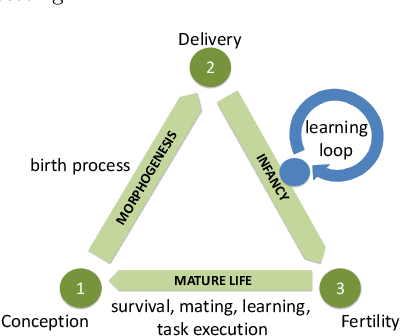
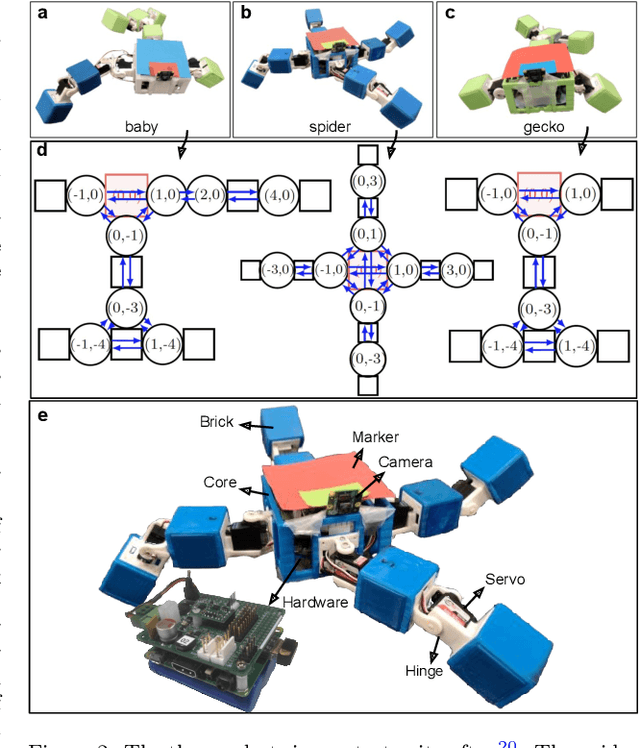
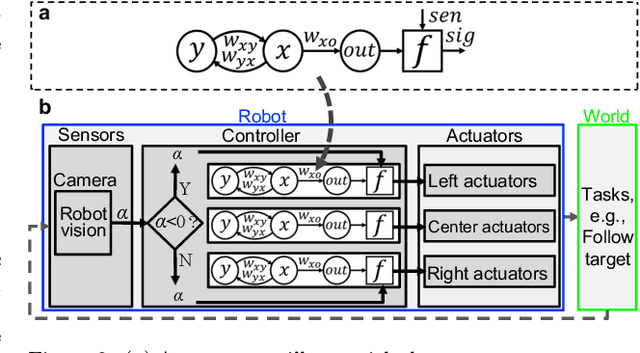
The challenge of robotic reproduction -- making of new robots by recombining two existing ones -- has been recently cracked and physically evolving robot systems have come within reach. Here we address the next big hurdle: producing an adequate brain for a newborn robot. In particular, we address the task of targeted locomotion which is arguably a fundamental skill in any practical implementation. We introduce a controller architecture and a generic learning method to allow a modular robot with an arbitrary shape to learn to walk towards a target and follow this target if it moves. Our approach is validated on three robots, a spider, a gecko, and their offspring, in three real-world scenarios.
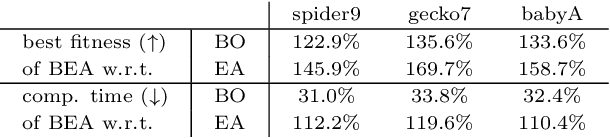
Time Efficiency in Optimization with a Bayesian-Evolutionary Algorithm
May 04, 2020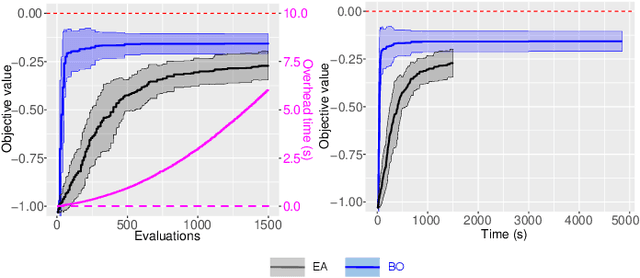
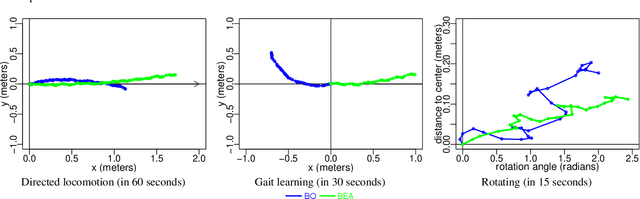
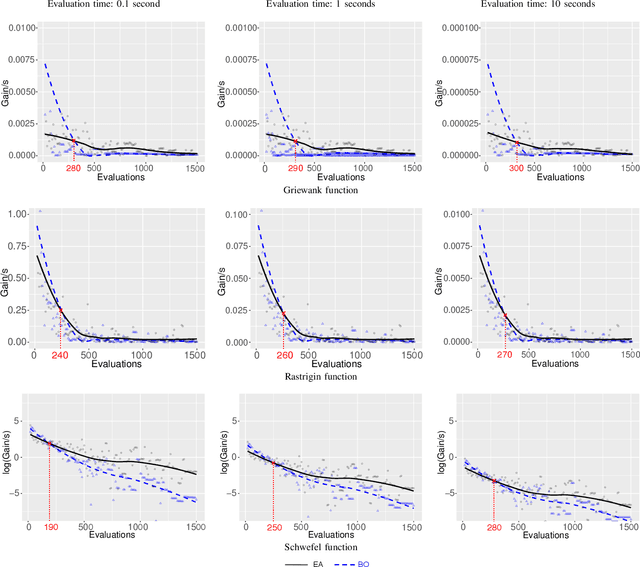
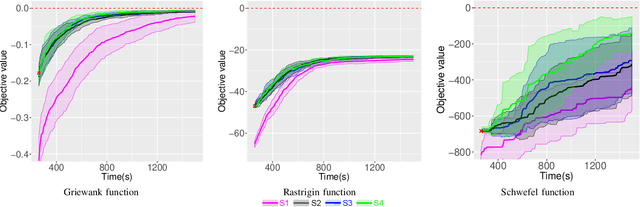
Not all generate-and-test search algorithms are created equal. Bayesian Optimization (BO) invests a lot of computation time to generate the candidate solution that best balances the predicted value and the uncertainty given all previous data, taking increasingly more time as the number of evaluations performed grows. Evolutionary Algorithms (EA) on the other hand rely on search heuristics that typically do not depend on all previous data and can be done in constant time. Both the BO and EA community typically assess their performance as a function of the number of evaluations. However, this is unfair once we start to compare the efficiency of these classes of algorithms, as the overhead times to generate candidate solutions are significantly different. We suggest to measure the efficiency of generate-and-test search algorithms as the expected gain in the objective value per unit of computation time spent. We observe that the preference of an algorithm to be used can change after a number of function evaluations. We therefore propose a new algorithm, a combination of Bayesian optimization and an Evolutionary Algorithm, BEA for short, that starts with BO, then transfers knowledge to an EA, and subsequently runs the EA. We compare the BEA with BO and the EA. The results show that BEA outperforms both BO and the EA in terms of time efficiency, and ultimately leads to better performance on well-known benchmark objective functions with many local optima. Moreover, we test the three algorithms on nine test cases of robot learning problems and here again we find that BEA outperforms the other algorithms.
Learning Directed Locomotion in Modular Robots with Evolvable Morphologies
Jan 21, 2020
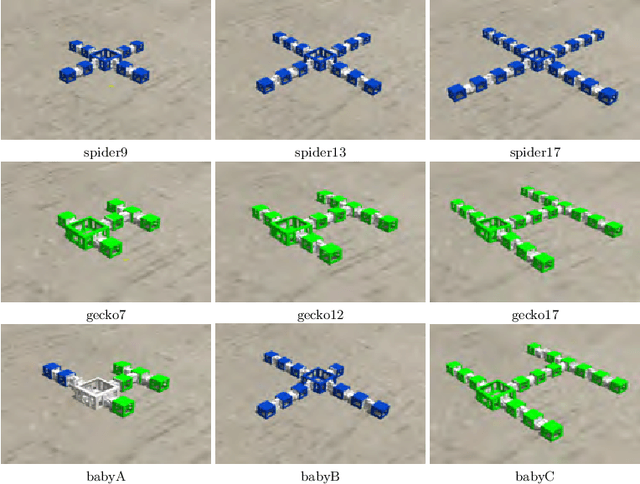

We generalize the well-studied problem of gait learning in modular robots in two dimensions. Firstly, we address locomotion in a given target direction that goes beyond learning a typical undirected gait. Secondly, rather than studying one fixed robot morphology we consider a test suite of different modular robots. This study is based on our interest in evolutionary robot systems where both morphologies and controllers evolve. In such a system, newborn robots have to learn to control their own body that is a random combination of the bodies of the parents. We apply and compare two learning algorithms, Bayesian optimization and HyperNEAT. The results of the experiments in simulation show that both methods successfully learn good controllers, but Bayesian optimization is more effective and efficient. We validate the best learned controllers by constructing three robots from the test suite in the real world and observe their fitness and actual trajectories. The obtained results indicate a reality gap that depends on the controllers and the shape of the robots, but overall the trajectories are adequate and follow the target directions successfully.