 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMaking Robots Play by the Rules: The ROS 2 CLIPS-Executive
Dec 14, 2025CLIPS is a rule-based programming language for building knowledge-driven applications, well suited for the complex task of coordinating autonomous robots. Inspired by the CLIPS-Executive originally developed for the lesser known Fawkes robotics framework, we present an Integration of CLIPS into the ROS ecosystem. Additionally, we show the flexibility of CLIPS by describing a PDDL-based planning framework integration.
LogicAD: Explainable Anomaly Detection via VLM-based Text Feature Extraction
Jan 08, 2025

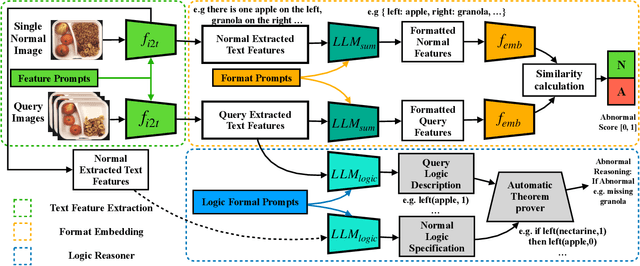
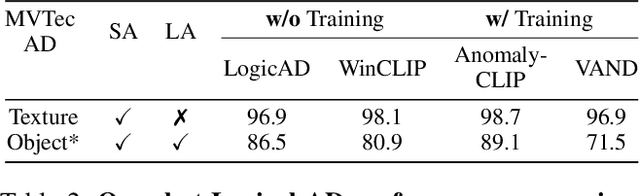
Logical image understanding involves interpreting and reasoning about the relationships and consistency within an image's visual content. This capability is essential in applications such as industrial inspection, where logical anomaly detection is critical for maintaining high-quality standards and minimizing costly recalls. Previous research in anomaly detection (AD) has relied on prior knowledge for designing algorithms, which often requires extensive manual annotations, significant computing power, and large amounts of data for training. Autoregressive, multimodal Vision Language Models (AVLMs) offer a promising alternative due to their exceptional performance in visual reasoning across various domains. Despite this, their application to logical AD remains unexplored. In this work, we investigate using AVLMs for logical AD and demonstrate that they are well-suited to the task. Combining AVLMs with format embedding and a logic reasoner, we achieve SOTA performance on public benchmarks, MVTec LOCO AD, with an AUROC of 86.0% and F1-max of 83.7%, along with explanations of anomalies. This significantly outperforms the existing SOTA method by a large margin.
Demonstrating Data-to-Knowledge Pipelines for Connecting Production Sites in the World Wide Lab
Dec 16, 2024The digital transformation of production requires new methods of data integration and storage, as well as decision making and support systems that work vertically and horizontally throughout the development, production, and use cycle. In this paper, we propose Data-to-Knowledge (and Knowledge-to-Data) pipelines for production as a universal concept building on a network of Digital Shadows (a concept augmenting Digital Twins). We show a proof of concept that builds on and bridges existing infrastructure to 1) capture and semantically annotates trajectory data from multiple similar but independent robots in different organisations and use cases in a data lakehouse and 2) an independent process that dynamically queries matching data for training an inverse dynamic foundation model for robotic control. The article discusses the challenges and benefits of this approach and how Data-to-Knowledge pipelines contribute efficiency gains and industrial scalability in a World Wide Lab as a research outlook.
A ROS~2-based Navigation and Simulation Stack for the Robotino
Nov 14, 2024The Robotino, developed by Festo Didactic, serves as a versatile platform in education and research for mobile robotics tasks. However, there currently is no ROS2 integration for the Robotino available. In this paper, we describe our work on a Webots simulation environment for a Robotino platform extended by LIDAR sensors. A ROS2 integration and a pre-configured setup for localization and navigation using existing ROS packages from the Nav2 suite are provided. We validate our setup by comparing simulations with real-world experiments conducted by three Robotinos in a logistics environment in our lab. Additionally, we tested the setup using a ROS 2 hardware driver for the Robotino developed by team GRIPS of the RoboCup Logistics League. The results demonstrate the feasibility of using ROS2 and Nav2 for navigation tasks on the Robotino platform showing great consistency between simulation and real-world performance.
Decidable Reasoning About Time in Finite-Domain Situation Calculus Theories
Feb 05, 2024Representing time is crucial for cyber-physical systems and has been studied extensively in the Situation Calculus. The most commonly used approach represents time by adding a real-valued fluent $\mathit{time}(a)$ that attaches a time point to each action and consequently to each situation. We show that in this approach, checking whether there is a reachable situation that satisfies a given formula is undecidable, even if the domain of discourse is restricted to a finite set of objects. We present an alternative approach based on well-established results from timed automata theory by introducing clocks as real-valued fluents with restricted successor state axioms and comparison operators. %that only allow comparisons against fixed rationals. With this restriction, we can show that the reachability problem for finite-domain basic action theories is decidable. Finally, we apply our results on Golog program realization by presenting a decidable procedure for determining an action sequence that is a successful execution of a given program.
Extracting Rules from Event Data for Study Planning
Oct 04, 2023In this study, we examine how event data from campus management systems can be used to analyze the study paths of higher education students. The main goal is to offer valuable guidance for their study planning. We employ process and data mining techniques to explore the impact of sequences of taken courses on academic success. Through the use of decision tree models, we generate data-driven recommendations in the form of rules for study planning and compare them to the recommended study plan. The evaluation focuses on RWTH Aachen University computer science bachelor program students and demonstrates that the proposed course sequence features effectively explain academic performance measures. Furthermore, the findings suggest avenues for developing more adaptable study plans.
Multi-Valued Partial Order Plans in Numeric Planning
Jul 27, 2023Many planning formalisms allow for mixing numeric with Boolean effects. However, most of these formalisms are undecidable. In this paper, we will analyze possible causes for this undecidability by studying the number of different occurrences of actions, an approach that proved useful for metric fluents before. We will start by reformulating a numeric planning problem known as restricted tasks as a search problem. We will then show how an NP-complete fragment of numeric planning can be found by using heuristics. To achieve this, we will develop the idea of multi-valued partial order plans, a least committing compact representation for (sequential and parallel) plans. Finally, we will study optimization techniques for this representation to incorporate soft preconditions.
Digital Shadows of Safety for Human Robot Collaboration in the World-Wide Lab
Apr 04, 2023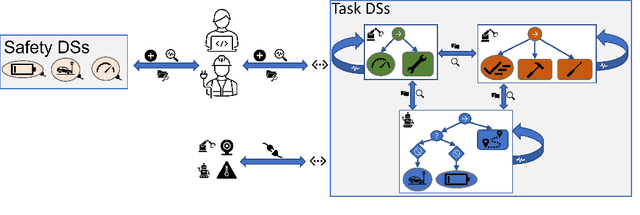
The World Wide Lab (WWL) connects the Digital Shadows (DSs) of processes, products, companies, and other entities allowing the exchange of information across company boundaries. Since DSs are context- and purpose-specific representations of a process, as opposed to Digital Twins (DTs) which offer a full simulation, the integration of a process into the WWL requires the creation of DSs representing different aspects of the process. Human-Robot Collaboration (HRC) for assembly processes was recently studied in the context of the WWL where Behaviour Trees (BTs) were proposed as a standard task-level representation of these processes. We extend previous work by proposing to standardise safety functions that can be directly integrated into these BTs. This addition uses the WWL as a communication and information exchange platform allowing industrial and academic practitioners to exchange, reuse, and experiment with different safety requirements and solutions in the WWL.
Assistive Robot Teleoperation Using Behavior Trees
Mar 19, 2023Robotic assistance in robot arm teleoperation tasks has recently gained a lot of traction in industrial and domestic environment. A wide variety of input devices is used in such setups. Due to the noise in the input signals (e.g., Brain Computer Interface (BCI)) or delays due to environmental conditions (e.g., space robot teleoperation), users need assistive autonomy that keeps them in control while following predefined trajectories and avoids obstacles. This assistance calls for activity representations that are easy to define by the operator and able to take the dynamic world state into consideration. This paper represents Activities of Daily Living using Behavior Trees (BTs) whose inherent readability and modularity enables an end user to define new activities using a simple interface. To achieve this, we augment BTs with Shared Control Action Nodes, which guide the user's input on a trajectory facilitating and ensuring task execution.
A Combined Approach of Process Mining and Rule-based AI for Study Planning and Monitoring in Higher Education
Nov 22, 2022This paper presents an approach of using methods of process mining and rule-based artificial intelligence to analyze and understand study paths of students based on campus management system data and study program models. Process mining techniques are used to characterize successful study paths, as well as to detect and visualize deviations from expected plans. These insights are combined with recommendations and requirements of the corresponding study programs extracted from examination regulations. Here, event calculus and answer set programming are used to provide models of the study programs which support planning and conformance checking while providing feedback on possible study plan violations. In its combination, process mining and rule-based artificial intelligence are used to support study planning and monitoring by deriving rules and recommendations for guiding students to more suitable study paths with higher success rates. Two applications will be implemented, one for students and one for study program designers.