 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZero-Shot Parameter Learning of Robot Dynamics Using Bayesian Statistics and Prior Knowledge
Jun 24, 2025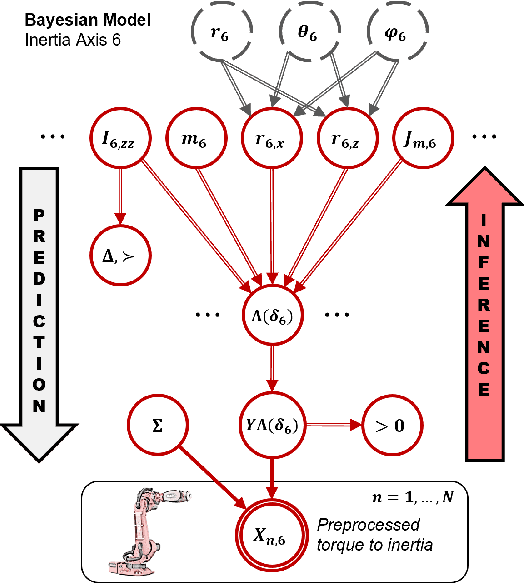
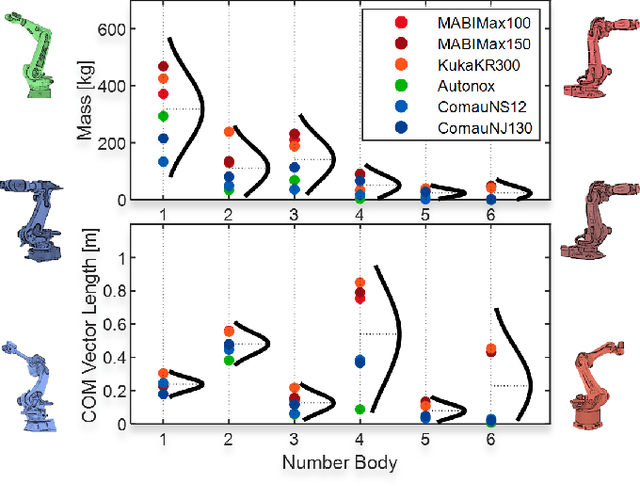
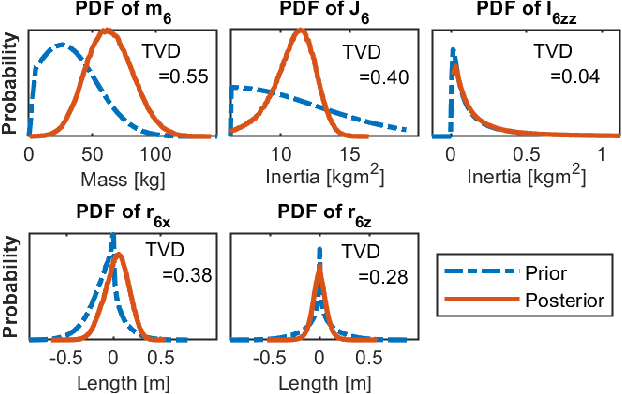
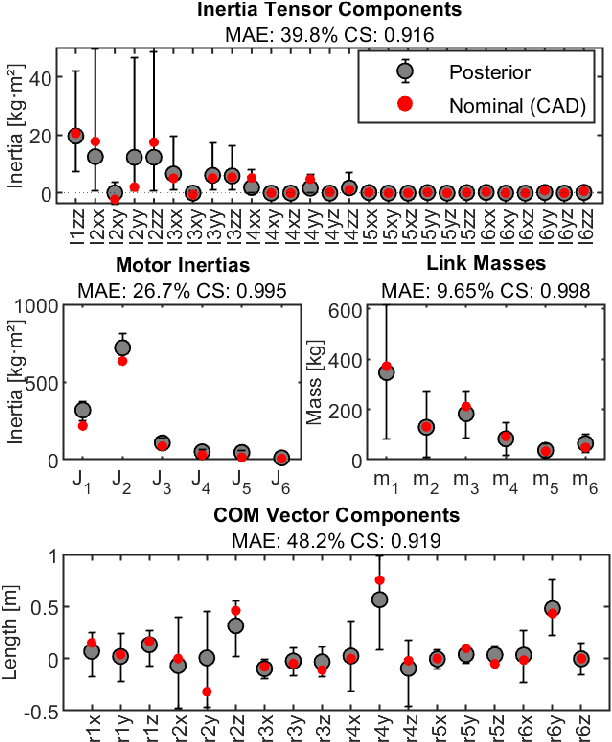
Inertial parameter identification of industrial robots is an established process, but standard methods using Least Squares or Machine Learning do not consider prior information about the robot and require extensive measurements. Inspired by Bayesian statistics, this paper presents an identification method with improved generalization that incorporates prior knowledge and is able to learn with only a few or without additional measurements (Zero-Shot Learning). Furthermore, our method is able to correctly learn not only the inertial but also the mechanical and base parameters of the MABI Max 100 robot while ensuring physical feasibility and specifying the confidence intervals of the results. We also provide different types of priors for serial robots with 6 degrees of freedom, where datasheets or CAD models are not available.
Demonstrating Data-to-Knowledge Pipelines for Connecting Production Sites in the World Wide Lab
Dec 16, 2024



The digital transformation of production requires new methods of data integration and storage, as well as decision making and support systems that work vertically and horizontally throughout the development, production, and use cycle. In this paper, we propose Data-to-Knowledge (and Knowledge-to-Data) pipelines for production as a universal concept building on a network of Digital Shadows (a concept augmenting Digital Twins). We show a proof of concept that builds on and bridges existing infrastructure to 1) capture and semantically annotates trajectory data from multiple similar but independent robots in different organisations and use cases in a data lakehouse and 2) an independent process that dynamically queries matching data for training an inverse dynamic foundation model for robotic control. The article discusses the challenges and benefits of this approach and how Data-to-Knowledge pipelines contribute efficiency gains and industrial scalability in a World Wide Lab as a research outlook.
Assistive Robot Teleoperation Using Behavior Trees
Mar 19, 2023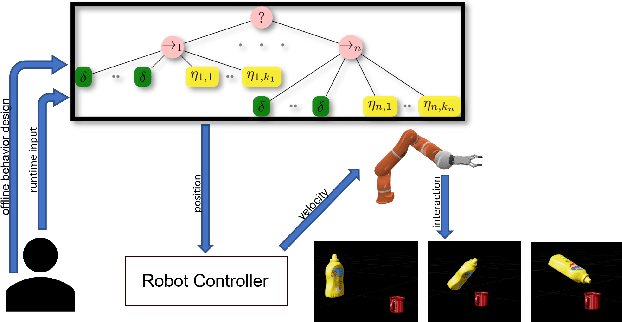


Robotic assistance in robot arm teleoperation tasks has recently gained a lot of traction in industrial and domestic environment. A wide variety of input devices is used in such setups. Due to the noise in the input signals (e.g., Brain Computer Interface (BCI)) or delays due to environmental conditions (e.g., space robot teleoperation), users need assistive autonomy that keeps them in control while following predefined trajectories and avoids obstacles. This assistance calls for activity representations that are easy to define by the operator and able to take the dynamic world state into consideration. This paper represents Activities of Daily Living using Behavior Trees (BTs) whose inherent readability and modularity enables an end user to define new activities using a simple interface. To achieve this, we augment BTs with Shared Control Action Nodes, which guide the user's input on a trajectory facilitating and ensuring task execution.