 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDemonstrating Data-to-Knowledge Pipelines for Connecting Production Sites in the World Wide Lab
Dec 16, 2024



The digital transformation of production requires new methods of data integration and storage, as well as decision making and support systems that work vertically and horizontally throughout the development, production, and use cycle. In this paper, we propose Data-to-Knowledge (and Knowledge-to-Data) pipelines for production as a universal concept building on a network of Digital Shadows (a concept augmenting Digital Twins). We show a proof of concept that builds on and bridges existing infrastructure to 1) capture and semantically annotates trajectory data from multiple similar but independent robots in different organisations and use cases in a data lakehouse and 2) an independent process that dynamically queries matching data for training an inverse dynamic foundation model for robotic control. The article discusses the challenges and benefits of this approach and how Data-to-Knowledge pipelines contribute efficiency gains and industrial scalability in a World Wide Lab as a research outlook.
Digital Shadows of Safety for Human Robot Collaboration in the World-Wide Lab
Apr 04, 2023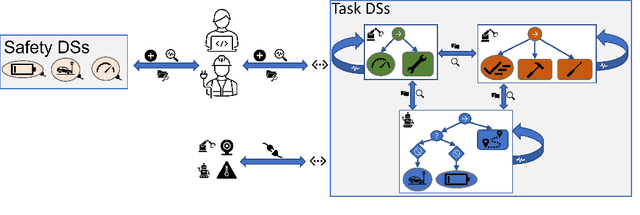
The World Wide Lab (WWL) connects the Digital Shadows (DSs) of processes, products, companies, and other entities allowing the exchange of information across company boundaries. Since DSs are context- and purpose-specific representations of a process, as opposed to Digital Twins (DTs) which offer a full simulation, the integration of a process into the WWL requires the creation of DSs representing different aspects of the process. Human-Robot Collaboration (HRC) for assembly processes was recently studied in the context of the WWL where Behaviour Trees (BTs) were proposed as a standard task-level representation of these processes. We extend previous work by proposing to standardise safety functions that can be directly integrated into these BTs. This addition uses the WWL as a communication and information exchange platform allowing industrial and academic practitioners to exchange, reuse, and experiment with different safety requirements and solutions in the WWL.
Assistive Robot Teleoperation Using Behavior Trees
Mar 19, 2023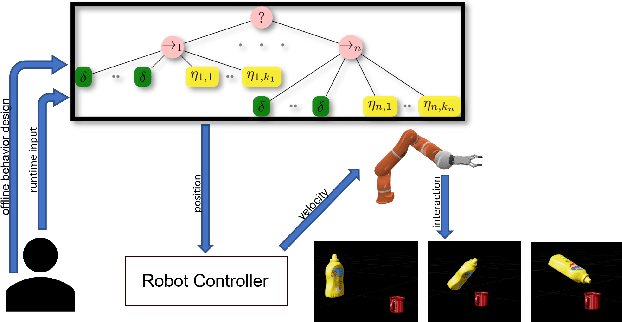


Robotic assistance in robot arm teleoperation tasks has recently gained a lot of traction in industrial and domestic environment. A wide variety of input devices is used in such setups. Due to the noise in the input signals (e.g., Brain Computer Interface (BCI)) or delays due to environmental conditions (e.g., space robot teleoperation), users need assistive autonomy that keeps them in control while following predefined trajectories and avoids obstacles. This assistance calls for activity representations that are easy to define by the operator and able to take the dynamic world state into consideration. This paper represents Activities of Daily Living using Behavior Trees (BTs) whose inherent readability and modularity enables an end user to define new activities using a simple interface. To achieve this, we augment BTs with Shared Control Action Nodes, which guide the user's input on a trajectory facilitating and ensuring task execution.
Predictive Object-Centric Process Monitoring
Jul 20, 2022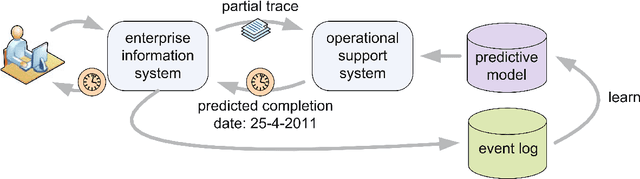
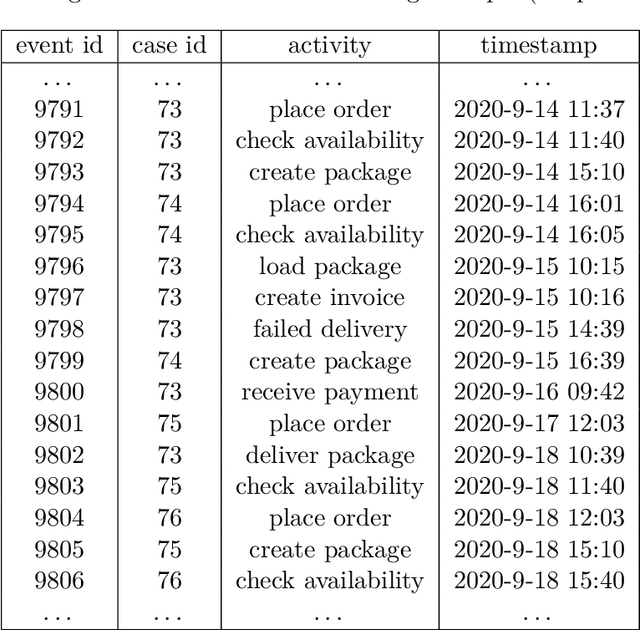
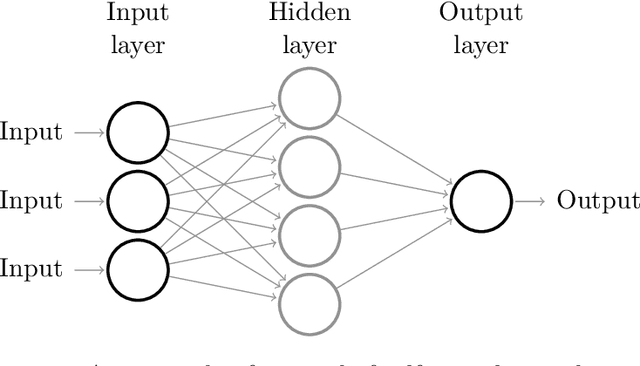
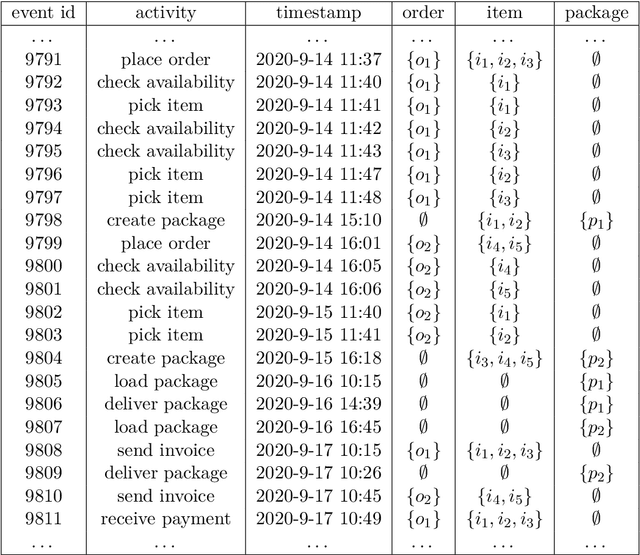
The automation and digitalization of business processes has resulted in large amounts of data captured in information systems, which can aid businesses in understanding their processes better, improve workflows, or provide operational support. By making predictions about ongoing processes, bottlenecks can be identified and resources reallocated, as well as insights gained into the state of a process instance (case). Traditionally, data is extracted from systems in the form of an event log with a single identifying case notion, such as an order id for an Order to Cash (O2C) process. However, real processes often have multiple object types, for example, order, item, and package, so a format that forces the use of a single case notion does not reflect the underlying relations in the data. The Object-Centric Event Log (OCEL) format was introduced to correctly capture this information. The state-of-the-art predictive methods have been tailored to only traditional event logs. This thesis shows that a prediction method utilizing Generative Adversarial Networks (GAN), Long Short-Term Memory (LSTM) architectures, and Sequence to Sequence models (Seq2seq), can be augmented with the rich data contained in OCEL. Objects in OCEL can have attributes that are useful in predicting the next event and timestamp, such as a priority class attribute for an object type package indicating slower or faster processing. In the metrics of sequence similarity of predicted remaining events and mean absolute error (MAE) of the timestamp, the approach in this thesis matches or exceeds previous research, depending on whether selected object attributes are useful features for the model. Additionally, this thesis provides a web interface to predict the next sequence of activities from user input.