 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMaking Robots Play by the Rules: The ROS 2 CLIPS-Executive
Dec 14, 2025CLIPS is a rule-based programming language for building knowledge-driven applications, well suited for the complex task of coordinating autonomous robots. Inspired by the CLIPS-Executive originally developed for the lesser known Fawkes robotics framework, we present an Integration of CLIPS into the ROS ecosystem. Additionally, we show the flexibility of CLIPS by describing a PDDL-based planning framework integration.
From Production Logistics to Smart Manufacturing: The Vision for a New RoboCup Industrial League
Jul 15, 2025
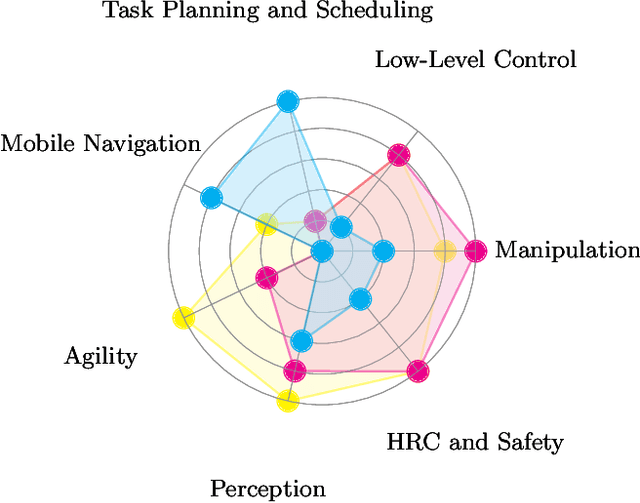
The RoboCup Logistics League is a RoboCup competition in a smart factory scenario that has focused on task planning, job scheduling, and multi-agent coordination. The focus on production logistics allowed teams to develop highly competitive strategies, but also meant that some recent developments in the context of smart manufacturing are not reflected in the competition, weakening its relevance over the years. In this paper, we describe the vision for the RoboCup Smart Manufacturing League, a new competition designed as a larger smart manufacturing scenario, reflecting all the major aspects of a modern factory. It will consist of several tracks that are initially independent but gradually combined into one smart manufacturing scenario. The new tracks will cover industrial robotics challenges such as assembly, human-robot collaboration, and humanoid robotics, but also retain a focus on production logistics. We expect the reenvisioned competition to be more attractive to newcomers and well-tried teams, while also shifting the focus to current and future challenges of industrial robotics.
A ROS~2-based Navigation and Simulation Stack for the Robotino
Nov 14, 2024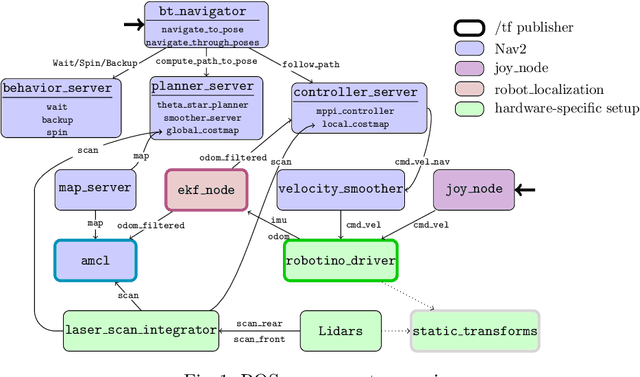
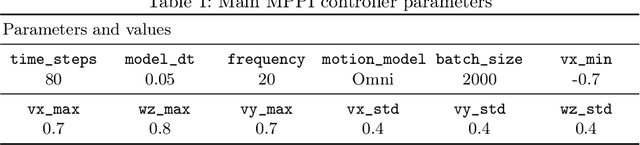
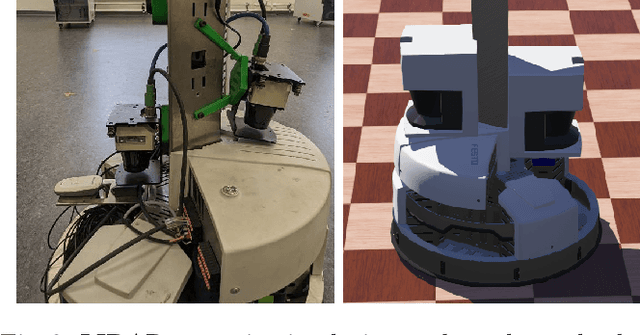
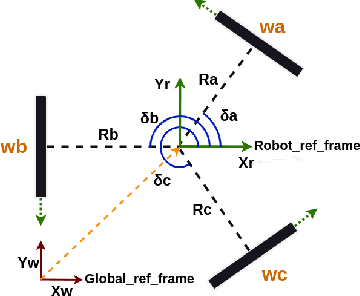
The Robotino, developed by Festo Didactic, serves as a versatile platform in education and research for mobile robotics tasks. However, there currently is no ROS2 integration for the Robotino available. In this paper, we describe our work on a Webots simulation environment for a Robotino platform extended by LIDAR sensors. A ROS2 integration and a pre-configured setup for localization and navigation using existing ROS packages from the Nav2 suite are provided. We validate our setup by comparing simulations with real-world experiments conducted by three Robotinos in a logistics environment in our lab. Additionally, we tested the setup using a ROS 2 hardware driver for the Robotino developed by team GRIPS of the RoboCup Logistics League. The results demonstrate the feasibility of using ROS2 and Nav2 for navigation tasks on the Robotino platform showing great consistency between simulation and real-world performance.
Towards Using Promises for Multi-Agent Cooperation in Goal Reasoning
Jun 20, 2022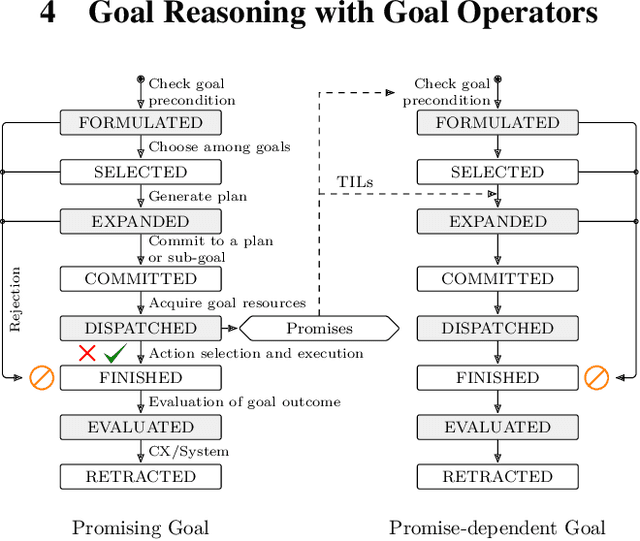
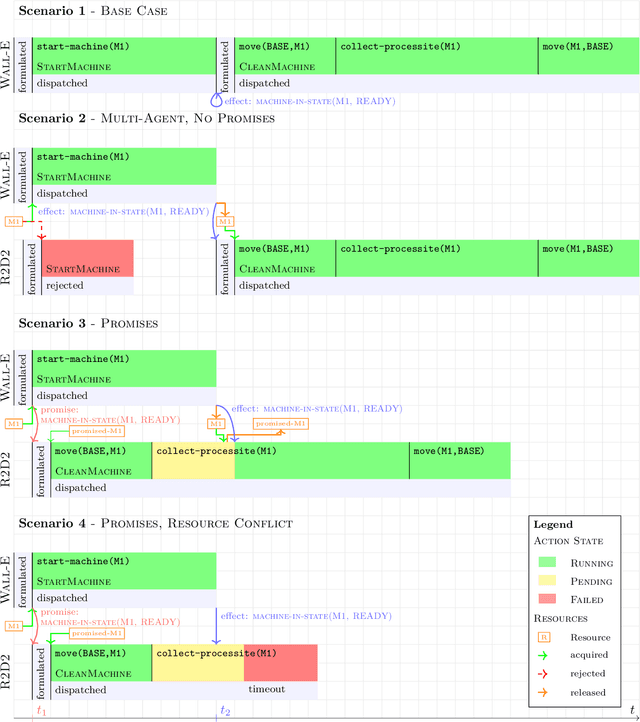
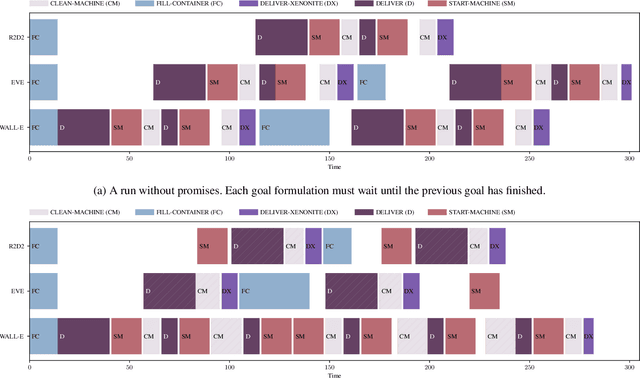
Reasoning and planning for mobile robots is a challenging problem, as the world evolves over time and thus the robot's goals may change. One technique to tackle this problem is goal reasoning, where the agent not only reasons about its actions, but also about which goals to pursue. While goal reasoning for single agents has been researched extensively, distributed, multi-agent goal reasoning comes with additional challenges, especially in a distributed setting. In such a context, some form of coordination is necessary to allow for cooperative behavior. Previous goal reasoning approaches share the agent's world model with the other agents, which already enables basic cooperation. However, the agent's goals, and thus its intentions, are typically not shared. In this paper, we present a method to tackle this limitation. Extending an existing goal reasoning framework, we propose enabling cooperative behavior between multiple agents through promises, where an agent may promise that certain facts will be true at some point in the future. Sharing these promises allows other agents to not only consider the current state of the world, but also the intentions of other agents when deciding on which goal to pursue next. We describe how promises can be incorporated into the goal life cycle, a commonly used goal refinement mechanism. We then show how promises can be used when planning for a particular goal by connecting them to timed initial literals (TILs) from PDDL planning. Finally, we evaluate our prototypical implementation in a simplified logistics scenario.