 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSatisficing and Optimal Generalised Planning via Goal Regression (Extended Version)
Nov 14, 2025Generalised planning (GP) refers to the task of synthesising programs that solve families of related planning problems. We introduce a novel, yet simple method for GP: given a set of training problems, for each problem, compute an optimal plan for each goal atom in some order, perform goal regression on the resulting plans, and lift the corresponding outputs to obtain a set of first-order $\textit{Condition} \rightarrow \textit{Actions}$ rules. The rules collectively constitute a generalised plan that can be executed as is or alternatively be used to prune the planning search space. We formalise and prove the conditions under which our method is guaranteed to learn valid generalised plans and state space pruning axioms for search. Experiments demonstrate significant improvements over state-of-the-art (generalised) planners with respect to the 3 metrics of synthesis cost, planning coverage, and solution quality on various classical and numeric planning domains.
From Production Logistics to Smart Manufacturing: The Vision for a New RoboCup Industrial League
Jul 15, 2025
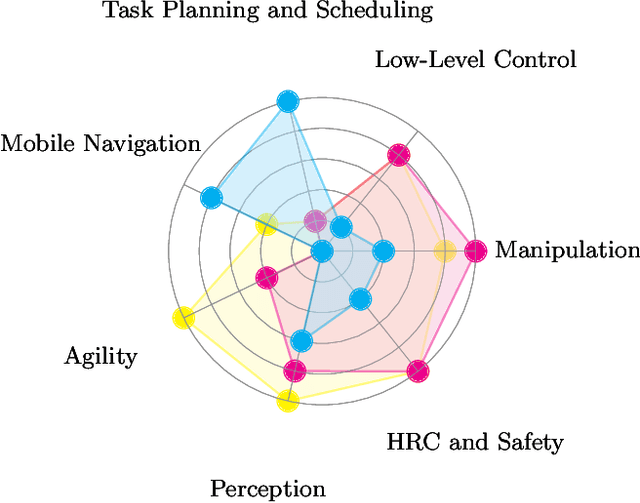
The RoboCup Logistics League is a RoboCup competition in a smart factory scenario that has focused on task planning, job scheduling, and multi-agent coordination. The focus on production logistics allowed teams to develop highly competitive strategies, but also meant that some recent developments in the context of smart manufacturing are not reflected in the competition, weakening its relevance over the years. In this paper, we describe the vision for the RoboCup Smart Manufacturing League, a new competition designed as a larger smart manufacturing scenario, reflecting all the major aspects of a modern factory. It will consist of several tracks that are initially independent but gradually combined into one smart manufacturing scenario. The new tracks will cover industrial robotics challenges such as assembly, human-robot collaboration, and humanoid robotics, but also retain a focus on production logistics. We expect the reenvisioned competition to be more attractive to newcomers and well-tried teams, while also shifting the focus to current and future challenges of industrial robotics.
LTLf Synthesis on First-Order Action Theories
Oct 01, 2024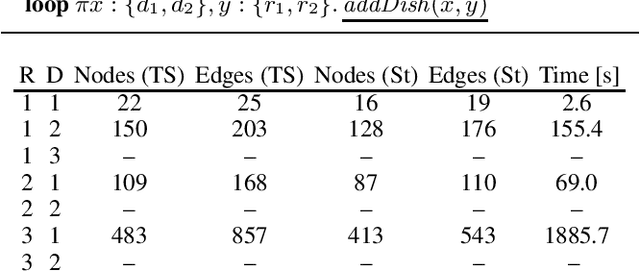
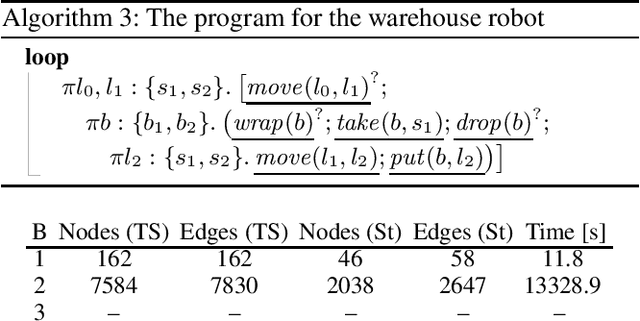
Golog is an expressive high-level agent language that includes nondeterministic operators which allow to leave some of the decisions to be made only at execution time. This so-called program realization is typically implemented by means of search, or in an incremental online fashion. In this paper, we consider the more realistic case where parts of the non-determinism are under the control of the environment. Program realization then becomes a synthesis problem, where a successful realization executes the program and satisfies the temporal goal for all possible environment actions. We consider Golog programs in combination with an expressive class of first-order action theories that allow for an unbounded number of objects and non-local effects, together with a temporal goal specified in a first-order extension of LTLf. We solve the synthesis problem by constructing a game arena that captures all possible executions of the program while tracking the satisfaction of the temporal goal and then solving the resulting two-player game. We evaluate the approach in two domains, showing the general feasibility of the approach.
Learning Generalized Policies for Fully Observable Non-Deterministic Planning Domains
Apr 03, 2024General policies represent reactive strategies for solving large families of planning problems like the infinite collection of solvable instances from a given domain. Methods for learning such policies from a collection of small training instances have been developed successfully for classical domains. In this work, we extend the formulations and the resulting combinatorial methods for learning general policies over fully observable, non-deterministic (FOND) domains. We also evaluate the resulting approach experimentally over a number of benchmark domains in FOND planning, present the general policies that result in some of these domains, and prove their correctness. The method for learning general policies for FOND planning can actually be seen as an alternative FOND planning method that searches for solutions, not in the given state space but in an abstract space defined by features that must be learned as well.
Decidable Reasoning About Time in Finite-Domain Situation Calculus Theories
Feb 05, 2024Representing time is crucial for cyber-physical systems and has been studied extensively in the Situation Calculus. The most commonly used approach represents time by adding a real-valued fluent $\mathit{time}(a)$ that attaches a time point to each action and consequently to each situation. We show that in this approach, checking whether there is a reachable situation that satisfies a given formula is undecidable, even if the domain of discourse is restricted to a finite set of objects. We present an alternative approach based on well-established results from timed automata theory by introducing clocks as real-valued fluents with restricted successor state axioms and comparison operators. %that only allow comparisons against fixed rationals. With this restriction, we can show that the reachability problem for finite-domain basic action theories is decidable. Finally, we apply our results on Golog program realization by presenting a decidable procedure for determining an action sequence that is a successful execution of a given program.
Towards Bridging the Gap between High-Level Reasoning and Execution on Robots
Dec 30, 2023When reasoning about actions, e.g., by means of task planning or agent programming with Golog, the robot's actions are typically modeled on an abstract level, where complex actions such as picking up an object are treated as atomic primitives with deterministic effects and preconditions that only depend on the current state. However, when executing such an action on a robot it can no longer be seen as a primitive. Instead, action execution is a complex task involving multiple steps with additional temporal preconditions and timing constraints. Furthermore, the action may be noisy, e.g., producing erroneous sensing results and not always having the desired effects. While these aspects are typically ignored in reasoning tasks, they need to be dealt with during execution. In this thesis, we propose several approaches towards closing this gap.
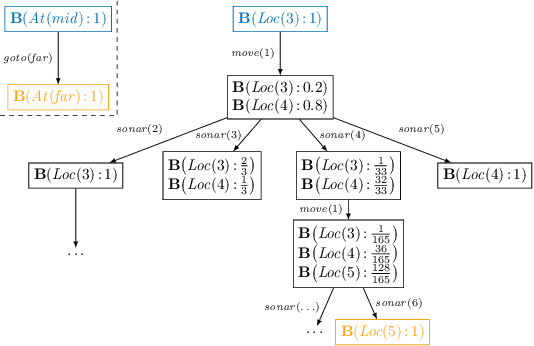
Using Abstraction for Interpretable Robot Programs in Stochastic Domains
Jul 26, 2022A robot's actions are inherently stochastic, as its sensors are noisy and its actions do not always have the intended effects. For this reason, the agent language Golog has been extended to models with degrees of belief and stochastic actions. While this allows more precise robot models, the resulting programs are much harder to comprehend, because they need to deal with the noise, e.g., by looping until some desired state has been reached with certainty, and because the resulting action traces consist of a large number of actions cluttered with sensor noise. To alleviate these issues, we propose to use abstraction. We define a high-level and nonstochastic model of the robot and then map the high-level model into the lower-level stochastic model. The resulting programs are much easier to understand, often do not require belief operators or loops, and produce much shorter action traces.
Towards Using Promises for Multi-Agent Cooperation in Goal Reasoning
Jun 20, 2022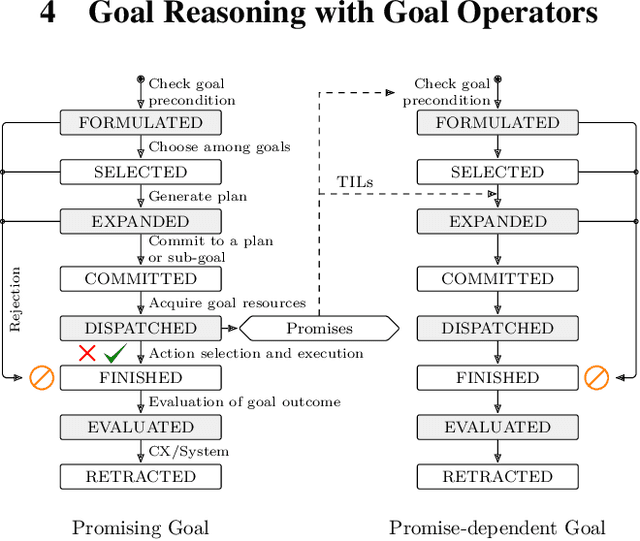
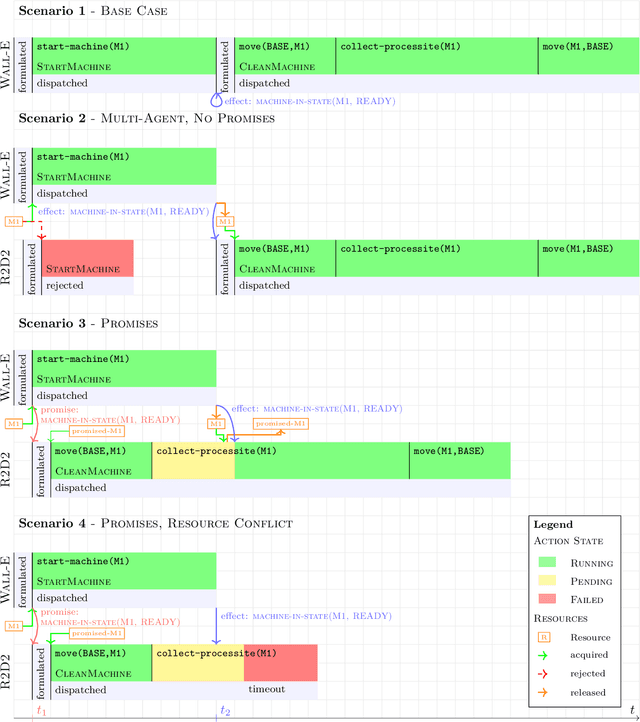
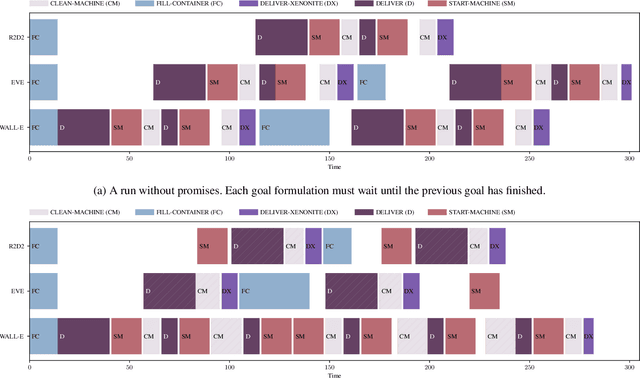
Reasoning and planning for mobile robots is a challenging problem, as the world evolves over time and thus the robot's goals may change. One technique to tackle this problem is goal reasoning, where the agent not only reasons about its actions, but also about which goals to pursue. While goal reasoning for single agents has been researched extensively, distributed, multi-agent goal reasoning comes with additional challenges, especially in a distributed setting. In such a context, some form of coordination is necessary to allow for cooperative behavior. Previous goal reasoning approaches share the agent's world model with the other agents, which already enables basic cooperation. However, the agent's goals, and thus its intentions, are typically not shared. In this paper, we present a method to tackle this limitation. Extending an existing goal reasoning framework, we propose enabling cooperative behavior between multiple agents through promises, where an agent may promise that certain facts will be true at some point in the future. Sharing these promises allows other agents to not only consider the current state of the world, but also the intentions of other agents when deciding on which goal to pursue next. We describe how promises can be incorporated into the goal life cycle, a commonly used goal refinement mechanism. We then show how promises can be used when planning for a particular goal by connecting them to timed initial literals (TILs) from PDDL planning. Finally, we evaluate our prototypical implementation in a simplified logistics scenario.
Controlling Golog Programs against MTL Constraints
Apr 07, 2022While Golog is an expressive programming language to control the high-level behavior of a robot, it is often tedious to use on a real robotic system. On an actual robot, the user needs to consider low-level details, such as enabling and disabling hardware components, e.g., a camera to detect objects for grasping. In other words, high-level actions usually pose implicit temporal constraints on the low-level platform, which are typically independent of the concrete program to be executed. In this paper, we propose to make these constraints explicit by modeling them as MTL formulas, which enforce the execution of certain low-level platform operations in addition to the main program. Based on results from timed automata controller synthesis, we describe a method to synthesize a controller that executes both the high-level program and the low-level platform operations concurrently in order to satisfy the MTL specification. This allows the user to focus on the high-level behavior without the need to consider low-level operations. We present an extension to Golog by clocks together with the required theoretical foundations as well as decidability results.
Abstracting Noisy Robot Programs
Apr 07, 2022
Abstraction is a commonly used process to represent some low-level system by a more coarse specification with the goal to omit unnecessary details while preserving important aspects. While recent work on abstraction in the situation calculus has focused on non-probabilistic domains, we describe an approach to abstraction of probabilistic and dynamic systems. Based on a variant of the situation calculus with probabilistic belief, we define a notion of bisimulation that allows to abstract a detailed probabilistic basic action theory with noisy actuators and sensors by a possibly deterministic basic action theory. By doing so, we obtain abstract Golog programs that omit unnecessary details and which can be translated back to a detailed program for actual execution. This simplifies the implementation of noisy robot programs, opens up the possibility of using deterministic reasoning methods (e.g., planning) on probabilistic problems, and provides domain descriptions that are more easily understandable and explainable.